一种高楼层外侧墙面喷涂擦洗机器人
1.本发明涉及机器人领域,具体是一种高楼层外侧墙面喷涂擦洗机器人。
背景技术:
2.随着我国经济的不断发展,各地的办公楼、写字楼等高层建筑林立而起,高楼外侧的窗体及外部墙面通常通过专业人员携带绳索等去清洗,清洗工人需要悬挂在高空中才可以进行高楼屋外侧的清洗,这样不仅会对清洗工人的生命安全造成威胁,同时也会产生一笔不小的资金。
3.虽然市场上有大量的清洗机器人,但大多是负压吸附式和磁性吸附式,由于施工环境千差万别,此类机器人很难适应。事实上采用这种吸附式机器人,不仅移动速度慢、携带载荷低,而且面对粗糙墙面时可靠性不高,高空坠落危险较大;因此,针对上述问题提出一种高楼层外侧墙面喷涂擦洗机器人。
技术实现要素:
4.为了弥补现有技术的不足,解决现有的吸附式机器人,不仅移动速度慢、携带载荷低,而且面对粗糙墙面时可靠性不高,高空坠落危险较大的问题,本发明提出一种高楼层外侧墙面喷涂擦洗机器人。
5.本发明解决其技术问题所采用的技术方案是:本发明所述的一种高楼层外侧墙面喷涂擦洗机器人,包括移动绳索收放机构;所述移动绳索收放机构通过起重绳与旋翼式贴墙清洗机器人相连,所述旋翼式贴墙清洗机器人的下端面安装有清洗液存储回收机构,移动横梁机构安装于墙体上;工作时,本设计能够适用于起伏较大的墙面,它可以在上下移动的同时左右运动,因而可以自动对一面墙体进行清洗或喷涂,而且多余的清理液或喷涂剂还能通过存储回收机构回收,避免清理液或喷涂剂的浪费。
6.优选的,所述移动绳索收放机构包括行走安装台,所述行走安装台的下端面左右两边均安装有传动轴,传动轴中部安装一号传动齿轮,传动轴左右两端均安装有橡胶轮,橡胶轮与地面接触并移动;所述行走安装台的下端面左右两端的三号限位凹槽中均安装有一号伺服电机,一号伺服电机的转动轴上安装有二号传动齿轮,二号传动齿轮与一号传动齿轮啮合;所述行走安装台上端面安装有双齿轮传动轴,双齿轮传动轴左右两端均安装一个收线盘,两个收线盘各连接一条起重绳;所述行走安装台上端面左右两边的一号限位孔中均安装一个起重电机,外部安装一号保护盖;所述起重电机轴上的齿轮与双齿轮传动轴上的齿轮啮合;工作时,当两个一号伺服电机同向转动时,一号伺服电机转动轴上的二号传动齿轮通过带动一号传动齿轮转动,使得传动轴转动,传动轴左右两端安装的橡胶轮与地面接触同向转动,使移动绳索收放机构能够左右移动;行走安装台上端面左右两边的一号限位孔中安装的两个起重电机同向转动时带动双齿轮传动轴转动,使两个收线盘同向转动,两个收线盘各连接一条起重绳通过缠绕的方式进行收线或放线操作。
7.优选的,所述清洗液存储回收机构包括水槽,所述水槽靠近墙面的一侧安装有吸
水滚筒、橡胶滚筒和挤压筒;所述水槽下端面的一号限位凹槽内安装有二号伺服电机,二号伺服电机通过一号传动带与挤压筒相连;所述水槽的左右两侧均通过一号紧定螺栓安装有二号保护盖,且传动带位于二号保护盖内部;工作时,二号伺服电机通过一号传动带带动挤压筒旋转;挤压筒通过摩擦力使吸水滚筒旋转同时吸收墙面上的液体,经过挤压后的吸水滚筒吸收的液体流到水槽上端面,再通过左右两边的漏水孔流入储水槽从而减少浪费;水槽上端面的四个限位柱用六号紧定螺栓同旋翼式贴墙清洗机器人固定。
8.优选的,所述旋翼式贴墙清洗机器人包括机体,所述机体上端面左右两侧均安装一个一号滑轮;所述机体上端面中部安装有喷涂装置;所述机体远离墙面一侧的两个二号限位凹槽内均装有一个高速电机,高速电机与转轴相连,转轴的八个一号通孔上均装有旋翼;所述机体靠近墙面一侧的中部上下两个孔中均装有一号低速电机,一号低速电机上方安装有电机盖,电机盖通过二号紧定螺栓固定一号低速电机;所述一号低速电机通过二号传动带带动带轮旋转;清洗盘用三号紧定螺栓和一号紧定螺母同带轮固定并一同转动;机盖通过紧定螺钉同机体固定实现封闭式传动;工作时,一号滑轮用来连接两根起重绳的另一端,使得机器人始终与墙面保持相同的角度;机体上端面中部安装的喷涂装置通过吸水管和二号通孔从储水槽内吸取液体,喷涂到墙上;二号限位凹槽内均装有一个高速电机,两个高速电机的转向相反并带动转轴转动,使转轴的八个一号通孔上的旋翼转动,旋翼推力面朝向背墙面,吸力面朝向墙面,从而产生朝向墙面的推力,使机体紧贴墙面同时消除了扭矩。
9.优选的,所述移动横梁机构包括移动横梁前支架,所述移动横梁前支架远离墙面一侧的上部左右两边均装有二号滑轮;所述移动横梁前支架靠近墙面一侧的下端面均装有二号低速电机,二号低速电机前端均装有传动轮,每两个传动轮之间均装有承重轮,两个传动轮用履带连接;所述移动横梁前支架靠近墙面一侧的下端面上下左右均装有三号保护盖,三号保护盖用五号紧定螺栓与移动横梁前支架固定;所述移动横梁前支架靠近墙面一侧的上端面左右前后均有u型凹槽,u型凹槽中均装有三个承重轮,左右两承重轮用履带连接;所述移动横梁前支架利用四号紧定螺栓与二号紧定螺母与移动横梁后支架相连,所述移动横梁后支架远离墙面一侧的左右两边均装有二号滑轮;所述移动横梁后支架靠近墙面一侧的下端面均装有二号低速电机,二号低速电机前端均装有传动轮,每两个传动轮之间均装有承重轮,两个传动轮用履带连接;所述移动横梁后支架靠近墙面一侧的下端面左右两边均装有三号保护盖,三号保护盖用五号紧定螺栓与移动横梁后支架固定;所述移动横梁后支架靠近墙面一侧的上端面左右前后均有u型凹槽,u型凹槽中均装有三个承重轮,左右两承重轮用履带连接;工作时,所述移动横梁机构由移动横梁前支架和移动横梁后支架通过四号紧定螺栓相连,将其卡在楼顶墙体或窗户台上,然后旋紧二号紧定螺母使十个履带与墙面紧贴,二号低速电机通过传动轮带动履带旋转,沿着墙面,承重轮分担压力,利用履带与墙面的摩擦力使移动横梁机构能够左右移动与移动绳索收放机构同向水平运动。三号保护盖通过五号紧定螺栓与移动横梁后支架连接,以固定二号低速电机。
10.优选的,所述机体下端面装有吸水管,吸水管通过水槽上端面中间的二号通孔插入储水槽,水槽上端面左右两边均有漏水孔;所述水槽上端面的四个限位柱用六号紧定螺栓同机体下端二号限位孔固定。
11.优选的,所述机体远离墙面一侧的两个高速电机转向相反,高速电机带动的旋翼
推力面朝向背墙面,吸力面朝向对墙面;两个所述一号低速电机的转向相反。
12.本发明的有益之处在于:
13.1.本发明设置了移动横梁机构、移动绳索收放机构、旋翼式贴墙清洗机器人和清洗液存储回收机构,移动绳索收放机构的起重绳通过移动横梁机构的滑轮与旋翼式贴墙清洗机器人上端的两个滑轮连接,旋翼式贴墙清洗机器人和联结在机器人下方的清洗液存储回收机构一起上、下移动,而当移动横梁机构和移动绳索收放机构同向同速左右移动时,也能带动机器人一并左右平移,这样机器人就可完成上、下、左、右运行的目的,而机器人通过机体安装的反向双旋翼在抵消扭矩的同时对机器人产生朝向墙面的推力,使清洗盘始终紧贴墙面,从而达到无视特殊形状墙面和具体位置擦洗的目的,本发明将吸附式机器人由爬行操作改为移动横梁的平移和绳索的收放操作,它较爬行机器人具有更大的自主性与灵活性,具有更大的可操作空间,摆脱了建筑物表面材料及各种不同状况的束缚。
14.2.本发明设计的机器人在构造上力求多功能,不仅能清洗墙面,而且还具有表面喷涂能力,在运行速度上,负载能力上,都比吸附式爬壁机器人快的多,大的多,更主要是这种悬挂式机器人的全部操作过程都可以通过编程实现,从而对一面墙的自动清洁,所以工作不仅安全快捷,而且清洗的也更干净。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
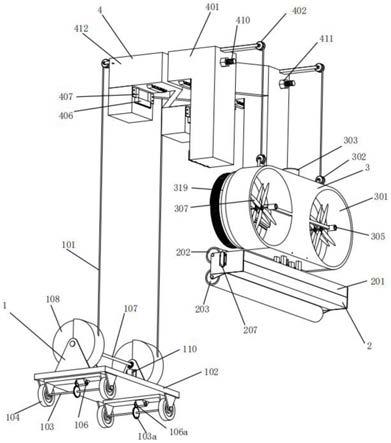
16.图1是本发明的整体结构示意图;
17.图2是本发明中移动绳索收放机构的结构示意图;
18.图3是本发明中移动绳索收放机构去除保护盖的结构示意图;
19.图4是本发明中清洗液存储回收机构的结构示意图;
20.图5是本发明中清洗液存储回收机构去除保护盖的结构示意图;
21.图6是本发明中清洗液存储回收机构的全剖示意图;
22.图7是本发明中旋翼式贴墙清洗机器人的结构示意图;
23.图8是本发明中旋翼式贴墙清洗机器人去除清洗盘与机盖的结构示意图;
24.图9是本发明中高速电机、转轴与旋翼的结构示意图;
25.图10是本发明中移动横梁机构的结构示意图;
26.图11是图10中的i处的局部放大图。
27.图中:1、移动绳索收放机构;101、起重绳;102、行走安装台;103、传动轴;103a、一号传动齿轮;104、橡胶轮;105、三号限位凹槽;106、一号伺服电机;106a、二号传动齿轮;107、双齿轮传动轴;108、收线盘;109、起重电机;109a、一号限位孔;110、一号保护盖;2、清洗液存储回收机构;201、水槽;202、吸水滚筒;203、橡胶滚筒;204、挤压筒;205a、一号限位凹槽;205、二号伺服电机;206、一号传动带;207、二号保护盖;208、一号紧定螺栓;209、二号通孔;210、储水槽;211、限位柱;212、漏水孔;3、旋翼式贴墙清洗机器人;301、机体;302、一号滑轮;303、喷涂装置;304、二号限位凹槽;305、高速电机;306、转轴;307、旋翼;307a、旋翼
推力面;307b、吸力面;308、一号低速电机;309、电机盖;310、二号紧定螺栓;311、带轮;312、二号传动带;313、三号紧定螺栓;314、一号紧定螺母;315、机盖;316、紧定螺钉;317、吸水管;318、二号限位孔;319、清洗盘;4、移动横梁机构;401、移动横梁前支架;402、二号滑轮;403、二号低速电机;404、传动轮;405、承重轮;406、履带;407、三号保护盖;408、五号紧定螺栓;409、u型凹槽;410、四号紧定螺栓;411、二号紧定螺母;412、移动横梁后支架。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
29.请参阅图1-11所示,一种高楼层外侧墙面喷涂擦洗机器人,包括移动绳索收放机构1;所述移动绳索收放机构1通过起重绳101与旋翼式贴墙清洗机器人3相连,所述旋翼式贴墙清洗机器人3的下端面安装有清洗液存储回收机构2,移动横梁机构4安装于墙体上。
30.所述移动绳索收放机构1包括行走安装台102,所述行走安装台102的下端面左右两边均安装有传动轴103,传动轴103中部安装一号传动齿轮103a,传动轴103左右两端均安装有橡胶轮104,橡胶轮104与地面接触并移动;所述行走安装台102的下端面左右两端的三号限位凹槽105中均安装有一号伺服电机106,一号伺服电机106的转动轴上安装有二号传动齿轮106a,二号传动齿轮106a与一号传动齿轮103a啮合;所述行走安装台102上端面安装有双齿轮传动轴107,双齿轮传动轴107左右两端均安装一个收线盘108,两个收线盘108各连接一条起重绳101;所述行走安装台102上端面左右两边的一号限位孔109a中均安装一个起重电机109,外部安装一号保护盖110;所述起重电机109轴上的齿轮与双齿轮传动轴107上的齿轮啮合;工作时,当两个一号伺服电机106同向转动时,一号伺服电机106转动轴上的二号传动齿轮106a通过带动一号传动齿轮103a转动,使得传动轴103转动,传动轴103左右两端安装的橡胶轮104与地面接触同向转动,使移动绳索收放机构1能够左右移动;行走安装台102上端面左右两边的一号限位孔109a中安装的两个起重电机109同向转动时带动双齿轮传动轴107转动,使两个收线盘108同向转动,两个收线盘108各连接一条起重绳101通过缠绕的方式进行收线或放线操作。
31.所述清洗液存储回收机构2包括水槽201,所述水槽201靠近墙面的一侧安装有吸水滚筒202、橡胶滚筒203和挤压筒204;所述水槽201下端面的一号限位凹槽205a内安装有二号伺服电机205,二号伺服电机205通过一号传动带206与挤压筒204相连;所述水槽201的左右两侧均通过一号紧定螺栓208安装有二号保护盖207,且一号传动带206位于二号保护盖207内部;工作时,二号伺服电机205通过一号传动带206带动挤压筒204旋转;挤压筒204通过摩擦力使吸水滚筒202旋转同时吸收墙面上的液体,经过挤压后的吸水滚筒202吸收的液体流到水槽201上端面,再通过左右两边的漏水孔212流入储水槽210从而减少浪费;水槽201上端面的四个限位柱211用六号紧定螺栓同旋翼式贴墙清洗机器人3固定。
32.所述旋翼式贴墙清洗机器人3包括机体301,所述机体301上端面左右两侧均安装一个一号滑轮302;所述机体301上端面中部安装有喷涂装置303;所述机体301远离墙面一侧的两个二号限位凹槽304内均装有一个高速电机305,高速电机305与转轴306相连,转轴
306的八个一号通孔上均装有旋翼307;所述机体301靠近墙面一侧的中部上下两个孔中均装有一号低速电机308,一号低速电机308上方安装有电机盖309,电机盖309通过二号紧定螺栓310固定一号低速电机308;所述一号低速电机308通过二号传动带312带动带轮311旋转;清洗盘319用三号紧定螺栓313和一号紧定螺母314同带轮311固定并一同转动;机盖315通过紧定螺钉316同机体301固定实现封闭式传动;工作时,滑轮用来连接两根起重绳101的另一端,使得机器人始终与墙面保持相同的角度;机体301上端面中部安装的喷涂装置303通过吸水管317和二号通孔209从储水槽210内吸取液体,喷涂到墙上;二号限位凹槽304内均装有一个高速电机305,两个高速电机305的转向相反并带动转轴306转动,使转轴306的八个一号通孔上的旋翼307转动,旋翼推力面307a朝向背墙面,吸力面307b朝向墙面,从而产生朝向墙面的推力,使机体301紧贴墙面同时消除了扭矩。
33.所述移动横梁机构4包括移动横梁前支架401,所述移动横梁前支架401远离墙面一侧的上部左右两边均装有二号滑轮402;所述移动横梁前支架401靠近墙面一侧的下端面均装有二号低速电机403,二号低速电机403前端均装有传动轮404,每两个传动轮404之间均装有承重轮405,两个传动轮404用履带406连接;所述移动横梁前支架401靠近墙面一侧的下端面上下左右均装有三号保护盖407,三号保护盖407用五号紧定螺栓408与移动横梁前支架401固定;所述移动横梁前支架401靠近墙面一侧的上端面左右前后均有u型凹槽409,u型凹槽409中均装有三个承重轮405,左右两承重轮405用履带406连接;所述移动横梁前支架401利用四号紧定螺栓410与二号紧定螺母411与移动横梁后支架412相连,所述移动横梁后支架412远离墙面一侧的左右两边均装有二号滑轮402;所述移动横梁后支架412靠近墙面一侧的下端面均装有二号低速电机403,二号低速电机403前端均装有传动轮404,每两个传动轮404之间均装有承重轮405,两个传动轮404用履带406连接;所述移动横梁后支架412靠近墙面一侧的下端面左右两边均装有三号保护盖407,三号保护盖407用五号紧定螺栓408与移动横梁后支架412固定;所述移动横梁后支架412靠近墙面一侧的上端面左右前后均有u型凹槽409,u型凹槽409中均装有三个承重轮405,左右两承重轮405用履带406连接;工作时,所述移动横梁机构4由移动横梁前支架401和移动横梁后支架412通过四号紧定螺栓410相连,将其卡在楼顶墙体或窗户台上,然后旋紧二号紧定螺母411使十个履带406与墙面紧贴,二号低速电机403通过传动轮404带动履带406旋转,沿着墙面,承重轮405分担压力,利用履带406与墙面的摩擦力使移动横梁机构4能够左右移动与移动绳索收放机构1同向水平运动。三号保护盖407通过五号紧定螺栓408与移动横梁后支架412连接,以固定二号低速电机403。
34.所述机体301下端面装有吸水管317,吸水管317通过水槽201上端面中间的二号通孔209插入储水槽210,水槽201上端面左右两边均有漏水孔212;所述水槽201上端面的四个限位柱211用六号紧定螺栓同机体301下端二号限位孔318固定。
35.所述机体301远离墙面一侧的两个高速电机305转向相反,高速电机305带动的旋翼推力面307a朝向背墙面,吸力面307b朝向对墙面;两个所述一号低速电机308的转向相反。
36.工作原理:首先根据拟要固定的墙壁厚度确定移动横梁机构4前后支架张合的宽度,然后将四号紧定螺栓410穿过移动横梁前支架401和移动横梁后支架412,预调移动横梁机构4前后支架的距离,然后夹到外墙或窗户台墙壁上。旋紧二号紧定螺母411将前后支架
旋压紧,从而达到紧固移动横梁机构4于墙壁上的目的。在检查无误后将移动绳索收放机构1对齐移动横梁机构4,通过左右前后四个二号滑轮402悬挂两根起重绳101,起重绳101另一端与旋翼式贴墙清洗机器人3上端的两个一号滑轮302连接,清洗液存储回收机构2用紧定螺栓固定在旋翼式贴墙清洗机器人3下方,使清洗盘319与吸水滚筒202和橡胶滚筒203位于同一边且与墙面接触。移动横梁机构4使用二号低速电机403带动履带406运动,从而与利用一号伺服电机106带动橡胶轮104进行移动的移动绳索收放机构1进行同向同速水平移动,进而使旋翼式贴墙清洗机器人3和清洗液存储回收机构2左右移动。而移动绳索收放机构1通过起重电机109带动收线盘108旋转收放起重绳101,让旋翼式贴墙清洗机器人3和清洗液存储回收机构2得以上下移动。
37.移动绳索收放机构1和移动横梁机构4解决了机器人上下、左右位移和空间定位的问题,下边详述机器人的清洁系统。
38.旋翼式贴墙清洗机器人3的机体301上端面中部安装有喷涂装置303,吸水管317与喷头相联结将清洗液或喷涂剂通过喷涂装置303达到被清洗的墙面,而清洗盘319通过旋转清理墙面,由于清洗液存储回收机构2的存在,使得清洗墙面的污水不会向墙面下方溢流,而且能返复循环使用,既保证被清洗的墙面的清洁又节约了用水。
39.上述前、后、左、右、上、下均以说明书附图中的图1为基准,按照人物观察视角为标准,装置面对观察者的一面定义为前,观察者左侧定义为左,依次类推。
40.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
41.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1