人力档案智能化储存系统及方法
1.本发明人力资源档案存储领域,特别是涉及一种人力档案智能化储存系统及方法。
背景技术:
2.现有的人力资源档案在储存时往往采用矩形柜方式,通过设置多层结构进行放置,在放置和取档案操作时比较麻烦,且传统的储存形式需要占用较大的空间,且没法实现快速提取档案的功能。
3.如何节约档案的存储空间,如何实现快速存放和提取档案,成为待解决的技术问题。
4.如果要实现档案存储的智能化,必须要实现档案存储路径的可坐标化,配套对应的控制系统方可实现。
技术实现要素:
5.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种人力档案智能化储存系统及方法,用于解决现有技术中档案信息化的问题。
6.为实现上述目的及其他相关目的,本发明提供一种人力档案智能化储存系统,包括:
7.螺旋支撑导轨和存储装置,所述螺旋支撑导轨为平面螺旋结构,多个所述存储装置置于所述螺旋支撑导轨上,且所述存储装置位置底部为悬空结构;
8.所述存储装置包括:
9.圆筒,所述圆筒内壁上设有螺旋槽,所述圆筒侧面开设有取放口;
10.旋转组件,所述旋转组件包括螺旋叶片、支撑筒和多个支撑块,所述螺旋叶片的外侧设有若干导向块,所述导向块用于和所述螺旋槽配合,所述螺旋叶片固定在所述支撑筒上,所述支撑块固定在所述支撑筒内,所述支撑块在轴向方向上设有花键孔;
11.所述螺旋叶片的叶片间隔为档案存储空间;
12.驱动组件和花键轴,所述驱动组件驱动花键轴转动,所述花键轴和所述花键孔配合;
13.人力档案智能化储存系统还包括运输小车,所述运输小车用于将所述储存装置搬运到或者搬离所述螺旋支撑导轨。
14.可选的,所述运输小车为agv小车,agv小车进入到所述存储装置位置底部的悬空结构处,向上托起所述储存装置,并沿着所述螺旋支撑导轨的相邻间隔处运动。
15.可选的,每个所述储存装置上设有rfid标牌。
16.可选的,档案在所述档案存储空间内立向放置。
17.可选的,所述档案存储空间内设有多个立向挡板,多个所述立向挡板在所述螺旋叶片的螺旋方向上形成多个储存夹层。
18.可选的,所述立向挡板和所述螺旋叶片通过抽插安装结构实现可拆卸安装。
19.可选的,所述抽插安装结构包括卡位夹,所述卡位夹安装在所述螺旋叶片上,所述卡位夹位于所述立向挡板的上方或下方,夹持时,所述卡位夹和所述立向挡板过盈配合。
20.可选的,所述导向块和所述螺旋槽的截面均为弧形。
21.利用所述的人力档案智能化储存系统的方法,包括如下步骤:
22.接收所要存储的目标档案的坐标,其中存储装置在螺旋支撑导轨上的储存位置到螺旋支撑导轨的大螺旋末端的位置距离为第一坐标,其中储存夹层从初始状态运动到取放口位置时在所经历的路径长度为第二坐标;
23.根据第一坐标确定运输小车在螺旋支撑导轨的相邻间隔处的运动路径长度;
24.根据第二坐标确定驱动件的转动圈数。
25.如上所述,本发明的人力档案智能化储存系统及方法,至少具有以下有益效果:
26.1.通过圆筒内壁的螺旋槽,配合螺旋叶片的旋转,且螺旋叶片在旋转时支撑块由于内设花键孔,使得支撑块能够沿着驱动转动的花键轴运动,从而实现档案存储空间内的任一一处的档案都能够经过取放口,从而实现精准的定位,有利于实现档案储存的智能化信息化管理。
27.2.通过螺旋支撑导轨的设置,使得其能够将多个存储装置串在一起,且能够实现坐标变换,使得每个档案均能够通过第一坐标和第二坐标定位,且第一坐标和第二坐标均能够实现实体机械运动的对应,从而实现快速的存取以及定位。
28.3.通过rfid使得其可以通过标识进行二次识别,从而实现坐标的二次验证,避免档案存取错误。
附图说明
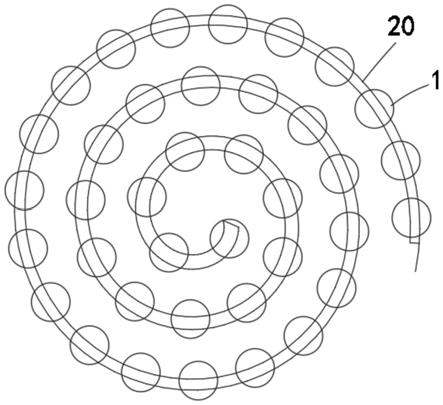
29.图1显示为本发明的人力档案智能化储存系统的示意图。
30.图2显示为本发明的档案放置状态的示意图。
31.图3显示为本发明的卡位夹和立向挡板配合的示意图。
32.图4显示为本发明的螺旋叶片和立向挡板配合的示意图。
33.图5显示为本发明的圆筒的示意图。
34.图6显示为本发明的人力档案存储装置示意图。
具体实施方式
35.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
36.请参阅图1至图6。须知,本说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
37.以下各个实施例仅是为了举例说明。各个实施例之间,可以进行组合,其不仅仅限于以下单个实施例展现的内容。
38.本实施例中,请参阅图1至图6,本发明提供一种人力档案智能化储存系统,包括:
39.螺旋支撑导轨20和存储装置1,所述螺旋支撑导轨20为平面螺旋结构,多个所述存储装置1置于所述螺旋支撑导轨20上,且所述存储装置1位置底部为悬空结构;悬空结构是为了让运输小车能够从底部托架存储装置。
40.所述存储装置1包括:
41.圆筒11,所述圆筒11内壁上设有螺旋槽111,所述圆筒11侧面开设有取放口112;
42.旋转组件12,所述旋转组件12包括螺旋叶片121、支撑筒122和多个支撑块123,所述螺旋叶片121的外侧设有若干导向块1211,所述导向块1211用于和所述螺旋槽111配合,所述螺旋叶片121固定在所述支撑筒122上,所述支撑块123固定在所述支撑筒122内,所述支撑块123在轴向方向上设有花键孔1231;
43.所述螺旋叶片121的叶片间隔为档案存储空间120。
44.驱动组件21和花键轴22,所述驱动组件21驱动花键轴22转动,所述花键轴22和所述花键孔配合;驱动组件21可以包括驱动件211和传动组212,驱动件211可以选择为电机,传动组212可以选择为齿轮、链条等各种方式传动,驱动件211可以直接驱动花键轴22,也可以通过中间齿轮传动再驱动花键轴22转动。如图6中,驱动组件位于圆筒11的下部,其也可以安装在圆筒11的顶部。
45.人力档案智能化储存系统还包括运输小车,所述运输小车用于将所述储存装置搬运到或者搬离所述螺旋支撑导轨20。
46.通过圆筒11内壁的螺旋槽111,配合螺旋叶片121的旋转,且螺旋叶片121在旋转时支撑块123由于内设花键孔1231,使得支撑块123能够沿着驱动转动的花键轴22运动,其中花键轴22属于驱动部分,花键轴22被电机渠道转动,本技术只保护档案储存这块的创新结构,故没在图示中展示花键轴22和电机等其他构件。螺旋叶片121转动且能够沿着螺旋槽111的路径逐渐上升或者下降,从而实现档案存储空间120内的任一一处的档案都能够经过取放口112,从而实现精准的定位,有利于实现档案储存的智能化信息化管理。如果采用普通的螺旋输料的结构,螺旋部分原地旋转,没法让任一一处的档案经过取放口112。更具体的,取放口112可以设置在圆筒11的中部位置。圆筒11的高度至少等于螺旋叶片121高度的2倍。通过圆筒内壁的螺旋槽,配合螺旋叶片的旋转,且螺旋叶片在旋转时支撑块由于内设花键孔,使得支撑块能够沿着驱动转动的花键轴22运动,从而实现档案存储空间内的任一一处的档案都能够经过取放口,从而实现精准的定位,有利于实现档案储存的智能化信息化管理。
47.本实施例中,所述运输小车为agv小车,agv小车进入到所述存储装置1位置底部的悬空结构处,向上托起所述储存装置,并沿着所述螺旋支撑导轨20的相邻间隔处运动。agv小车为现有技术,能够实现多向运动,以及托举重物和导航等功能,属于现有技术在发明的一个应用,agv小车可以参考现有技术,此处不做过多介绍。
48.本实施例中,可选的,每个所述储存装置上设有rfid标牌。在运输小车上对应设置读写器,能够通过无线的方式读取或存储对应的rfid标牌信息,从而可以通过rfid进行二次的档案信息校对。
49.如图2中,档案沿着螺旋叶片121的径向平行方位放置,形成由中心向外发散的结构,更好的利用空间,也方便档案的抽插方式的取放。
50.本实施例中,请参阅图3和图4,档案在所述档案存储空间120内立向放置。可选的,所述档案存储空间120内设有多个立向挡板1201,多个所述立向挡板1201在所述螺旋叶片121的螺旋方向上形成多个储存夹层。可选的,所述立向挡板1201和所述螺旋叶片121可拆卸安装。可选的,所述立向挡板1201和所述螺旋叶片121通过抽插安装结构实现可拆卸安装。此种方式一方面能够实现各个档案的隔离,避免取下某一个档案时,其他档案倾倒没法处于立向放置的状态。
51.本实施例中,请参阅图4,所述抽插安装结构包括卡位夹1202,所述卡位夹1202安装在所述螺旋叶片121上,所述卡位夹1202位于所述立向挡板1201的上方或下方,夹持时,所述卡位夹1202和所述立向挡板1201过盈配合。此种安装方式结构简单,且能够有效的实现隔离效果,且这种方式形成的空间可以根据插入不同间隔的立向挡板1201实现不同厚度档案的适应,能够进行随时调整。
52.本实施例中,请参阅图6,所述导向块1211和所述螺旋槽111的截面均为弧形。弧形的截面能够具有较高的适应性,相比矩形的截面来说安装的精度要求更低。
53.利用所述的人力档案智能化储存系统的方法,包括如下步骤:
54.接收所要存储的目标档案的坐标,其中存储装置1在螺旋支撑导轨20上的储存位置到螺旋支撑导轨20的大螺旋末端的位置距离为第一坐标,其中储存夹层从初始状态运动到取放口位置时在所经历的路径长度为第二坐标;
55.根据第一坐标确定运输小车在螺旋支撑导轨20的相邻间隔处的运动路径长度;
56.根据第二坐标确定驱动件211的转动圈数。驱动件211的转动圈数和取放口112的在螺旋槽上的路径长度关系唯一,第二坐标即对应螺旋槽上的运动路径长度,从而可以得出对应档案存取时,驱动件211转动多少圈可以将档案从取放口112运动到放置的对应状态,且这种螺旋叶片121上的任一一个档案都是有唯一坐标值的。通过两个坐标的对应实现定位以及对档案的信息存储。
57.综上所述,本发明通过圆筒内壁的螺旋槽,配合螺旋叶片的旋转,且螺旋叶片在旋转时支撑块由于内设花键孔,使得支撑块能够沿着驱动转动的花键轴22运动,从而实现档案存储空间内的任一一处的档案都能够经过取放口,从而实现精准的定位,有利于实现档案储存的智能化信息化管理。通过螺旋支撑导轨20的设置,使得其能够将多个存储装置1串在一起,且能够实现坐标变换,使得每个档案均能够通过第一坐标和第二坐标定位,且第一坐标和第二坐标均能够实现实体机械运动的对应,从而实现快速的存取以及定位。通过rfid使得其可以通过标识进行二次识别,从而实现坐标的二次验证,避免档案存取错误。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
58.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1