智能餐桌
1.本发明涉及烹饪领域,具体涉及一种智能餐桌。
背景技术:
2.目前的旋转餐桌的桌面是整体转动,一个人夹菜按停止转动的时候,其余人员只能等待当前夹菜人员夹完菜,才能夹取其他位置的菜,比较不方便。
3.而且,目前的餐桌是层叠式的餐桌,旋转部分位于上层,非旋转部分在下层,当有脏污在重叠区域,需要掀开上层旋转餐桌,很不方便。
技术实现要素:
4.有鉴于此,本发明提供一种智能餐桌,能够实现双平台相对独立旋转,且便于清洁。
5.为解决上述技术问题,本发明提供切菜系统,包括:
6.中心圆盘;
7.旋转轴,所述旋转轴连接在所述中心圆盘的底部;
8.电机,所述电机连接所述旋转轴,以驱动所述旋转轴旋转;
9.支撑座,所述支撑座连接所述电机的底部,以支撑所述电机;
10.托盘,所述托盘固定套设于所述支撑座,且位于所述中心圆盘的下方;
11.旋转转盘,所述旋转圆盘的形状为圆环状,所述旋转转盘套设在所述中心圆盘外围,且其底部可转动地连接在所述托盘的上表面;
12.连接杆,所述连接杆一端连接所述旋转转盘,其另一端通过可开合的抱环连接所述旋转轴,通过所述抱环的闭合和打开,能够实现其与所述旋转轴的连接和分离;
13.固定圆环,所述固定圆环套设在所述旋转转盘的外围,且其底部固定连接在所述托盘的表面;
14.多个设置器,多个所述设置器间隔开地排列在所述固定圆环的表面,所述设置器连接所述抱环,以控制所述抱环的闭合和打开;
15.在所述旋转圆盘与所述中心圆盘之间形成有第一间隙,在所述固定圆环和所述旋转圆盘之间形成有第二间隙。
16.进一步地,所述设置器还连接所述电机,以控制所述电机的运转、停止及转速。
17.进一步地,所述设置器包括:
18.摄像头,所述摄像头用于采集图像,所述摄像头面向所述中心圆盘的方向;
19.处理器,所述处理器连接所述摄像头,根据所述摄像头采集到的手臂伸出距离在第一间隙和第二间隙之间,判定为第一夹菜状态,并根据所述摄像头采集到的手臂伸出距离超过第二间隙,判定为第二夹菜状态;
20.控制器,所述控制器连接所述处理器,根据所述处理器处理出的第一夹菜状态且夹菜时间大于第一预定时间,控制所述抱环打开,以使得所述旋转转盘停止转动,并根据所
述处理器处理出的第二夹菜状态且夹菜时间大于第二预定时间,控制所述电机停止运转。
21.进一步地,所述处理器还根据所述摄像头采集到餐盘的食物残渣堆积程度达到预定程度,生成换盘信息,并将所述换盘信息发送至相关终端。
22.进一步地,所述智能餐桌还包括:
23.暖风机,所述暖风机设置在所述托盘的底部,且与所述托盘与所述固定圆环所围成的腔室连通,在所述中心圆环的表面设置有温度感应器,所述暖风机根据所述温度感应器感应到所述中心圆环的表面温度低于预定阈值,进行启动,通过所述第一间隙和所述第二间隙排出暖气,并根据所述温度感应器感应到所述中心圆环的表面温度高于预定阈值,进行关闭。
24.进一步地,所述托盘的底部形成有排水孔。
25.进一步地,所述中心圆盘、旋转转盘及所述固定圆环的材料为玻璃材料。
26.进一步地,所述设置器为触控显示装置,所述触控显示装置的显示面贴附于所述固定台面的下表面。
27.进一步地,所述智能餐桌还包括:
28.轨道,所述轨道设置在所述托盘的上表面上的与所述旋转转盘接触的位置;
29.滑块,所述滑块设置在所述旋转转盘的底部,且与所述轨道相适配。
30.进一步地,所述连接杆有多个,多个所述连接杆围绕所述抱环间隔开排列。
31.本发明的上述技术方案至少具有如下有益效果之一:
32.根据本发明的智能餐桌,支撑座稳定地支撑电机,电机驱动旋转轴转动,从而带动与其连接的中心圆盘转动。支撑座固定连接托盘,通过连接杆连接所述旋转轴的旋转转盘在托盘上可转动,连接杆的抱环的闭合和打开能够控制旋转转盘的旋转和停止。可以在中心圆盘放置容易夹的菜,在旋转转盘放置不容易夹的菜,就餐人员可以通过控制器控制实现在中心圆盘旋转基础上,旋转转盘停止运转,即在旋转转盘因为夹菜人员控制而停止转动时,中心圆盘仍然在旋转,实现双台面相对独立旋转,而且智能餐桌的表面是平面加便于清洁。
附图说明
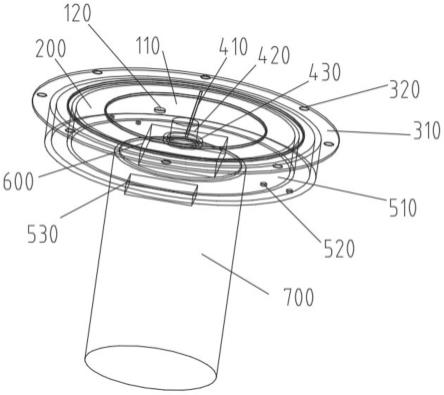
33.图1为根据本发明一实施例的智能餐桌的结构示意图;
34.图2为根据图1实施例的侧视图。
35.附图标记:
36.110、中心圆盘;120、温度感应器;200、旋转转盘;310、固定圆环;320、设置器;410、连接杆;420、旋转轴;430、抱环;510、托盘;520、排水孔;530、暖风机;600、电机;700、支撑座。
具体实施方式
37.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
38.除非另作定义,本发明中使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。。
39.下面,结合图1和图2,说明根据本发明实施例的智能餐桌。
40.如图1和图2所示,本发明实施例的智能餐桌包括:中心圆盘110、旋转轴420、电机600、支撑座700、托盘510、旋转转盘200、连接杆410、固定圆环310及多个设置器320。
41.首先,说明中心圆盘110和旋转轴420。旋转轴420连接在中心圆盘110的底部。
42.通过旋转轴420能够带动中心圆盘110转动,在中心圆盘110上放置菜盘,菜盘能够跟随转动,以便座在餐桌不同位置的人夹取菜。
43.接着,说明电机600和支撑座700。电机600连接旋转轴420,以驱动旋转轴420旋转。支撑座700连接电机600的底部,以支撑电机600。
44.电机600可以稳定地驱动旋转轴420转动,从而带动中心圆盘110转动。支撑座700可以稳定支撑电机600,保证电机600运转顺畅。
45.接下来,说明托盘510和旋转转盘200。托盘510固定套设于支撑座700,且位于中心圆盘110的下方。旋转圆盘的形状为圆环状,旋转转盘200套设在中心圆盘110外围,且其底部可转动地连接在托盘510的上表面。连接杆410一端连接旋转转盘200,其另一端通过可开合的抱环430连接旋转轴420,通过抱环430的闭合和打开,能够实现其与旋转轴420的连接和分离。
46.也就是说,支撑座700固定连接托盘510,以使得托盘510的位置固定,以支撑旋转转盘200。其中,托盘510可以是顶部开口的槽体,通过槽体的侧壁可转动地连接旋转转盘200。旋转转盘200可以在托盘510上稳定的转动,可以在旋转转盘200上放置菜。连接杆410可以连接旋转转盘200和旋转轴420,其抱环430闭合的时候,旋转轴420驱动连接杆410转动,实现旋转转盘200的转动,其抱环430打开的时候,旋转轴420和连接杆410分离,实现旋转转盘200的停止转动。
47.然后,说明固定圆环310和多个设置器320。固定圆环310套设在旋转转盘200的外围,且其底部固定连接在托盘510的表面。多个设置器320间隔开地排列在固定圆环310的表面,设置器320连接抱环430,以控制抱环430的闭合和打开。
48.可以在固定圆盘上放置餐盘,以便就餐。多个设置器320设置在固定圆环310的表面,通过设置器320控制抱环430的闭合和打开,从而控制旋转转盘200的转动与停止。
49.其中,在旋转圆盘与中心圆盘110之间形成有第一间隙,在固定圆环310和旋转圆盘之间形成有第二间隙。第一间隙和第二间隙的存在,避免不同台面之间的摩擦,使得运转更加稳定。
50.以上的智能餐桌,支撑座700稳定地支撑电机600,电机600驱动旋转轴420转动,从而带动与其连接的中心圆盘110转动。支撑座700固定连接托盘510,通过连接杆410连接旋转轴420的旋转转盘200在托盘510上可转动,连接杆410的抱环430的闭合和打开能够控制
旋转转盘200的旋转和停止。可以在中心圆盘110放置容易夹的菜,在旋转转盘200放置不容易夹的菜,就餐人员可以通过控制器控制实现在中心圆盘110旋转基础上,旋转转盘200停止运转,即在旋转转盘200因为夹菜人员控制而停止转动时,中心圆盘110仍然在旋转,实现双台面相对独立旋转,而且智能餐桌的表面是平面加便于清洁。
51.根据本发明一些实施例,设置器320还连接电机600,以控制电机600的运转、停止及转速。
52.通过设置器320能够控制电机600的运转、停止及转速,从而能够控制旋转转盘200和中心圆盘110的转动、停止及转速,更加便于就餐人员的夹菜。
53.进一步地,设置器320包括摄像头、处理器、及控制器。摄像头用于采集图像,摄像头面向中心圆盘110的方向。处理器连接摄像头,根据摄像头采集到的手臂伸出距离在第一间隙和第二间隙之间,判定为第一夹菜状态,并根据摄像头采集到的手臂伸出距离超过第二间隙,判定为第二夹菜状态。控制器连接处理器,根据处理器处理出的第一夹菜状态且夹菜时间大于第一预定时间,控制抱环430打开,以使得旋转转盘200停止转动,并根据处理器处理出的第二夹菜状态且夹菜时间大于第二预定时间,控制电机600停止运转。
54.摄像头采集到的手臂伸出距离在第一间隙和第二间隙之间,说明有就餐人员在夹旋转转盘200上的菜,控制器控制抱环430打开,使得旋转转盘200停止,从而便于此就餐人员在旋转转盘200上夹菜。夹菜时间大于第一预定时间能够避免误操作的时间(例如敬酒碰)以及夹很容易夹的菜的情况而造成旋转转盘200非必要的停止的情况发生。摄像头采集到的手臂伸出距离超过第二间隙,说明有就餐人员在夹中心圆盘110上的菜,控制器控制电机600停止运转,从而使得中心圆盘110停止转动,从而便于此就餐人员在中心转盘上夹菜。夹菜时间大于第二预定时间能够避免误操作的时间(例如敬酒碰)以及夹很容易夹的菜的情况而造成中心圆盘110非必要的停止的情况发生。处理器可以根据摄像头采集的图像中手臂与第一缝隙和第二缝隙是否有位置的重叠,以此来确认手臂与第一缝隙以及第二缝隙的距离。由此,能够自动实现就餐人员夹较难夹的菜时,所在的旋转转盘200或中心圆盘110上的菜停止转动,便于夹菜。
55.进一步地,处理器还根据摄像头采集到餐盘的食物残渣堆积程度达到预定程度,生成换盘信息,并将换盘信息发送至相关终端。通过机器学习,能够准确获知餐盘中食物残渣的堆积程度,从而便于服务人员及时换盘,增加就餐人员的满意度。
56.根据本发明一些实施例,智能餐桌还包括暖风机530。暖风机530设置在托盘510的底部,且与托盘510与固定圆环310所围成的腔室连通,在中心圆环的表面设置有温度感应器120,暖风机530根据温度感应器120感应到中心圆环的表面温度低于预定阈值,进行启动,通过第一间隙和第二间隙排出暖气,并根据温度感应器120感应到中心圆环的表面温度高于预定阈值,进行关闭。由此,能够避免环境温度过低,造成菜冷却过快的情况,而且第一缝隙和第二缝隙有气体吹出,避免污染物落入第一缝隙和第二缝隙。
57.进一步地,托盘510的底部形成有排水孔520。由此,能够及时排出落入缝隙的水。
58.根据本发明一些实施例,中心圆盘110、旋转转盘200及固定圆环310的材料为玻璃材料。玻璃材料透明,便于检查到污染物且较容易清洁。
59.进一步地,设置器320为触控显示装置,触控显示装置的显示面贴附于固定台面的下表面。触控显示装置设置在玻璃下面,玻璃能够保护触控显示装置,通过点击触控显示装
置能够较方便地进行控制。
60.根据本发明一些实施例,智能餐桌还包括轨道和滑块。轨道设置在托盘510的上表面上的与旋转转盘200接触的位置。滑块设置在旋转转盘200的底部,且与轨道相适配。由此,能够使得旋转转盘200在托盘510上更顺畅的滑动。
61.进一步地,连接杆410有多个,多个连接杆410围绕抱环430间隔开排列。多个连接杆410从而使得旋转转盘200的支撑更加稳定,避免倾斜。
62.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1