一种非接触式全自动洗碗烘干打包装置
1.本发明涉及一种非接触式全自动洗碗烘干打包装置及其使用方法,属于智能机器人领域。
背景技术:
[0002][0003][0004]
目前市场上所使用的清洗消毒杀菌一体机多用于家庭,且容量小,而商业拥堵却将清洗机、烘干消毒机以及打包机分开,中间需要工作人员去接触和传递,无形之中增加了病毒的传染概率。
技术实现要素:
[0005]
本发明提供了一种非接触式全自动洗碗烘干打包装置及其使用方法,以用于通过合理的构成及连接搭建洗碗烘干打包一体的非接触式平台。
[0006]
本发明的技术方案是:一种非接触式全自动洗碗烘干打包装置,包括烘干消毒区2、打包区5、输入传送带6、输出传送带7、清洗区域一8、清洗区域二12;其中,输入传送带6、清洗区域一8、清洗区域二12、烘干消毒区2、打包区5、输出传送带7依次连接,清洗区域一8、清洗区域二12、烘干消毒区2的传送装置呈螺旋式布置。
[0007]
所述清洗区域一8、清洗区域二12、烘干消毒区2整体沿输送方向设有内板19和外板 20,清洗区域一8、清洗区域二12、烘干消毒区2的传送装置为间隔布置的滚动体16;清洗区域一8、清洗区域二12的内板和外板的内侧设有喷头17,烘干消毒区2的内板内侧设有紫外线灯带ⅰ3,烘干消毒区2的外板内侧设有紫外线灯带ⅱ13,烘干消毒区2内设有弧形加热装置15。
[0008]
所述清洗区域一8、清洗区域二12的底部设有抽取式清洗槽18;且抽取式清洗槽18延伸至输入传送带6与清洗区域一8相接的一端。
[0009]
所述输出传送带7、输入传送带6呈上下布置。
[0010]
所述打包区5包括临时放置区、封装区;临时放置区用于放置由烘干消毒区2输送的餐具,通过机械手移动临时放置区中的餐具放置在封装区。
[0011]
所述机械手包括动力装置、机械臂4、吸盘,动力装置给机械臂4提供动力;机械臂4 末端的吸盘采用真空吸盘,则通过气泵10对机械臂4末端的吸盘进行抽气和放气;机械臂4 末端的吸盘采用电磁铁吸盘,通过控制装置1控制电磁铁线圈电流的通断,实现餐具的吸取和松开。
[0012]
根据本发明实施例的另一方面,提供了一种非接触式全自动洗碗烘干打包装置的使用方法,包括:
[0013]
第一清洗阶段:对输入传送带6批次传输至清洗区域一8中的餐具,通过清洗区域一8 中的传送装置带动运动,运动过程中,清洗区域一8中的喷头17喷洒清洁剂和热水;实
现初步清洗;
[0014]
第二清洗阶段:对清洗区域一8中的传送装置输送至清洗区域二12中的餐具,通过清洗区域二12中的传送装置带动运动,运动过程中,清洗区域二12中的喷头17喷洒热水;实现第二次清洗;
[0015]
烘干消毒阶段:对清洗区域二12输送至烘干消毒区2中的餐具,通过烘干消毒区2中的传送装置带动运动;运动过程中,紫外线灯带ⅰ3、紫外线灯带ⅱ13进行消毒,弧形加热装置15进行烘干;
[0016]
打包阶段:机械臂4先将打包盒体移至打包区5;接着机械臂4将清洗区域二12中的餐具移动至打包盒体内;机械臂4移动打包盒盖对打包盒体进行封盖;打包区5的传送带将装有餐具的打包盒输送至输出传送带7。
[0017]
所述打包阶段,具体为:机械臂4先将打包盒体移至打包区5中的封装区;接着机械臂 4将烘干消毒区2输送至打包区5的临时放置区中的餐具移动至打包盒体内;机械臂4移动打包盒盖对打包盒体进行封盖;封装区的传送带将装有餐具的打包盒输送至输出传送带7。
[0018]
根据餐具的数量或者重量驱动机械臂4移动打包盒盖对打包盒体进行封盖,进而对打包区传送带进行步进控制,实现分组传送。
[0019]
本发明的有益效果是:本发明通过巧妙地结构将清洗、烘干消毒、打包机融为一体,能够减少专用设备的使用数量及维护难度,节省了占地面积,降低了人力成本;独创式设计不仅能够提高清洗和烘干消毒的效果、有助于将残余物集中于一方,便于清理和替换,同时还能将其分组打包;整个过程中减少了人为的干预和接触,降低了因为餐具携带病毒或工作人员携带病毒导致传染扩散的风险,提高餐具卫生的同时还降低了生产成本。
附图说明
[0020]
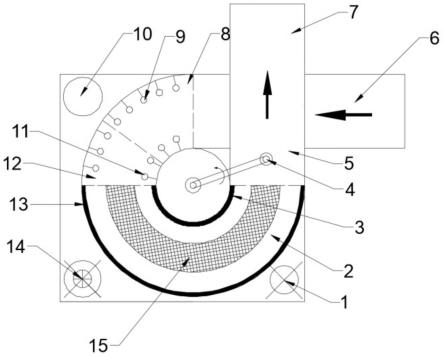
图1是本发明的整体布局结构示意图;
[0021]
图2是本发明中螺旋式布置结构示意图;
[0022]
图3为本发明中滚动体布局示意图;
[0023]
图4为本发明抽取式清洗槽布局示意图;
[0024]
图5为本发明中喷头的分布示意图;
[0025]
图6为本发明使用流程;
[0026]
图中各标号为:1-控制装置,2-烘干消毒区,3-紫外线灯带ⅰ,4-机械臂,5-打包区,6
‑ꢀ
输入传送带,7-输出传送带,8-清洗区域一,9/11-高压出水口,10-气泵,12-清洗区域二,13
‑ꢀ
紫外线灯带ⅱ,14-电机,15-弧形加热装置,16-滚动体,17-喷头,18-抽取式清洗槽,19-内板,20-外板。
具体实施方式
[0027]
下面结合附图和实施例,对发明做进一步的说明,但本发明的内容并不限于所述范围。
[0028]
实施例1:如图1-6所示,一种非接触式全自动洗碗烘干打包装置,包括烘干消毒区2、打包区5、输入传送带6、输出传送带7、清洗区域一8、清洗区域二12;其中,输入传送带 6、
清洗区域一8、清洗区域二12、烘干消毒区2、打包区5、输出传送带7依次连接,清洗区域一8、清洗区域二12、烘干消毒区2的传送装置呈螺旋式布置。
[0029]
可选地,所述清洗区域一8、清洗区域二12、烘干消毒区2整体沿输送方向设有内板19 和外板20,清洗区域一8、清洗区域二12、烘干消毒区2的传送装置为间隔布置的滚动体16;清洗区域一8、清洗区域二12的内板和外板的内侧设有高压喷头17,烘干消毒区2的内板内侧设有紫外线灯带ⅰ3,烘干消毒区2的外板内侧设有紫外线灯带ⅱ13,烘干消毒区2内设有弧形加热装置15。传送装置上设有防滑凸纹,以便于更好地输送餐具;内板19和外板20上设有盖体,清洗区域一8、清洗区域二12的盖体上可以用于放置打包盒体、打包盒盖。
[0030]
可选地,所述清洗区域一8、清洗区域二12的底部设有抽取式清洗槽18;且抽取式清洗槽18延伸至输入传送带6与清洗区域一8相接的一端。
[0031]
可选地,可以设置所述输出传送带7、输入传送带6呈上下布置;满足输出传送带7位于输入传送带6上。
[0032]
具体而言,所述输入传送带6、输出传送带7采用输送带,可以采用电机14作为滚动体、输送带的动力,滚动体与滚动体之间通过传动皮带连接,实现力的传递。弧形加热装置15置于烘干消毒区2的盖体内侧,采用开盖断电设计,增加人机安全性能。输入传送带6输送来的餐具传至清洗区域一8,掉落在输入传送带6上的残留物,通过清洗区域一8一端的刮板刮至抽取式清洗槽18。通过螺旋式布置的清洗区域一8、清洗区域二12、烘干消毒区2,且满足输出传送带7、输入传送带6呈上下布置,则使得输送过程中的残余物能流入抽取式清洗槽18,同时还可以使清洗过程中餐具内剩余残余物随着斜坡在水流的带动下高效地通过滚动体16之间的间隔空隙流入抽取式清洗槽18,进而方便工作人员抽取并倒出槽内剩余物;同时整个设计可以节省占地面积,且使得打包盒整体的高度、机械手的旋转角度不受输入传送带6影响。
[0033]
可选地,所述打包区5包括临时放置区、封装区;临时放置区用于放置由烘干消毒区2 输送的餐具,通过机械手移动临时放置区中的餐具放置在封装区。临时放置区无传送装置,封装区设有传送装置。
[0034]
可选地,所述机械手包括动力装置、机械臂4、吸盘,动力装置给机械臂4提供动力;机械臂4末端的吸盘采用真空吸盘,则通过气泵10对机械臂4末端的吸盘进行抽气和放气;机械臂4末端的吸盘采用电磁铁吸盘,通过控制装置1控制电磁铁线圈电流的通断,实现餐具的吸取和松开。通过电机提供动力带动机械臂绕电机轴绕旋转,带动机械臂末端的吸盘转动,通过气泵10对机械臂4末端的吸盘进行抽气实现吸附,通过放气实现脱离。其中,电磁铁也可以内置真空吸盘中,采用电磁铁式真空吸盘。对于餐具存在不同种类的情况,可以采用电磁铁式真空吸盘;对于餐具种类单一的场所,根据需要采用真空吸盘,或者电磁铁吸盘。
[0035]
根据本发明实施例的另一方面,还提供了一种非接触式全自动洗碗烘干打包装置的使用方法,包括:
[0036]
第一清洗阶段:对输入传送带6批次传输至清洗区域一8中的餐具,通过清洗区域一8 中的传送装置带动运动,运动过程中,清洗区域一8中的喷头17喷洒清洁剂和热水;实现初步清洗;
[0037]
第二清洗阶段:对清洗区域一8中的传送装置输送至清洗区域二12中的餐具,通过
清洗区域二12中的传送装置带动运动,运动过程中,清洗区域二12中的喷头17喷洒热水;实现第二次清洗;
[0038]
烘干消毒阶段:对清洗区域二12输送至烘干消毒区2中的餐具,通过烘干消毒区2中的传送装置带动运动;运动过程中,紫外线灯带ⅰ3、紫外线灯带ⅱ13进行消毒,弧形加热装置15进行烘干;其中烘干消毒可以在运动过程中进行,也可以静止过程中实现;
[0039]
打包阶段:机械臂4先将打包盒体移至打包区5;接着机械臂4将清洗区域二12中的餐具移动至打包盒体内;机械臂4移动打包盒盖对打包盒体进行封盖;打包区5的传送带将装有餐具的打包盒输送至输出传送带7。
[0040]
可选地,所述打包阶段,具体为:机械臂4先将打包盒体移至打包区5中的封装区;接着机械臂4将烘干消毒区2输送至打包区5的临时放置区中的餐具移动至打包盒体内;机械臂4移动打包盒盖对打包盒体进行封盖;封装区的传送带将装有餐具的打包盒输送至输出传送带7。
[0041]
可选地,根据餐具的数量或者重量驱动机械臂4移动打包盒盖对打包盒体进行封盖(即可以根据设定数量,或者设定重量范围的餐具驱动机械臂4移动打包盒盖对打包盒体进行封盖),进而对打包区传送带进行步进控制,实现分组传送。机械臂吸取打包盒体置于打包区,“当打包盒体内餐具达到一定数量或重量时,机械臂控制吸盘吸取打包盒盖将打包盒体封盖,完成动作后直线传送带启动,在传送一定距离后传送带停止。机械臂再次吸取打包盒体置于打包区,进而再次从烘干区2吸取的餐具至于打包盒体内,反复循环后,分组的餐具依次从传送带输出,进行存储,人们可根据需要将其取出使用。
[0042]
如下给出可选地应用过程:
[0043]
一、金属餐具:输入传送带将金属餐具运输到清洗区入口,第一清洗阶段操作耗时 30s-45s,喷洒洗涤剂并用热水冲洗;进入第二清洗阶段,第二清洗阶段操作耗时第15-30s,清水冲洗干净洗涤剂,清洗结束后;进入烘干消毒阶段,烘干消毒阶段操作耗时10-15min,将餐具传送至烘干消毒区内进行烘干消毒和杀菌处理,待烘干消毒杀菌后,由机械臂带动装有电磁铁的吸盘将其传送至打包区内进行打包,最终通过传送带将打包后的餐具输出。
[0044]
二、非金属塑性餐具:传送带将非金属塑性餐具运输到清洗区入口,第一清洗阶段操作耗时30s-45s,喷洒洗涤剂并用热水冲洗;进入第二清洗阶段,第二清洗阶段操作耗时第15-30s,清水冲洗干净洗涤剂,清洗结束后;进入烘干消毒阶段,烘干消毒阶段操作耗时10-15min,将餐具传送至烘干消毒区内进行烘干消毒和杀菌处理,待烘干消毒杀菌后,由机械臂带动食用橡胶材质的真空吸盘将其传送至打包区内进行打包,最终通过传送带将打包后的餐具输出。
[0045]
上述中,对于输入传送带输送来的餐具可以先进行初步去残,清洗区域一8喷射常温清洗液和水温介于60℃~90℃的热水并且水压介于15~25kpa的水流,目的是快速清洁餐具的残渣和油渍;清洗区域二仅喷射常温且水压为10~18kpa洁净水,其目的是将餐具上剩余清洗液冲洗干净;清洗过程中餐具被从清洗区内板内侧的高压出水口ⅰ11、外板内侧的高压出水口ⅱ9流出的高压水流冲洗,保证清洗洁净。烘干消毒阶段消毒温度介于100~150℃,紫外线波长范围为240~280nm;高温加紫外线双重杀菌模式,在烘干的同时进行杀菌,提高清洗效率。机械手待餐具先后完成清洗和烘干消毒后将餐具放入打包区,实现全程无接触作业。
[0046]
上面结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1