一种基于NB模块的自动化玻璃清洗装置及清洗方法与流程
一种基于nb模块的自动化玻璃清洗装置及清洗方法
技术领域
1.本发明涉及智能清洗设备技术领域,尤其涉及一种基于nb模块的自动化玻璃清洗装置及清洗方法。
背景技术:
2.随着社会的发展,城市的用地越来越有限,为了满足人类的生活工作的需要,建筑物越来越高,玻璃外墙作为建筑外层结构,使高层建筑物美观大方,吸引眼球,玻璃外墙同时也带来了相关的缺点,容易显脏,不仅影响室内的视线,也影响建筑物的外观,现行主要采用人工吊架的方式进行建筑物玻璃外墙的除尘工作,工人的安全不易保证,同时除尘费用高,工作环境恶劣。因此需要玻璃清洗装置,所述玻璃清洗装置能够通过吸盘在玻璃墙体上自由移动,移动时,采用分段式的移动方式,一组吸取机构进行移动其余的吸取机构保持吸紧状态,以此保证整个 装置在移动的过程中不会发生掉落和滑动的情况;工作时,采用两种不同的清洗方式,且清洗结束之后可通过视觉检测装置保证玻璃上的污垢能够被彻底的清除。
技术实现要素:
3.发明的目的:提供一种基于nb模块的自动化玻璃清洗装置,以解决现有技术存在的上述问题。
4.技术方案:一种基于nb模块的自动化玻璃清洗装置,包括:本体,其内部设置有控制机构;清洗机构,设置于所述本体的底部,所述清洗机构至少存在两个不同的清洗方向;抓取装置,安装于所述本体的端部;其中,所述抓取装置存在沿着本体端部方向的平移自由度以及所述本体上下方向上的平移自由度。
5.在进一步的实施例中,所述控制机构中的主控被设置为nb无线模块。
6.在进一步的实施例中,所述控制机构,包括:nb无线模块,其采用open cpu的模组;电源模块,电连接于所述nb无线模块;气动控制模块,电连接于所述nb无线模块;传感器模块,设置于所述清洗机构上,所述传感器模块电连接于所述nb无线模块;还包括:本体通讯模块,与所述nb无线模块存在通讯连接。
7.在进一步的实施例中,所述本体包括:下架,所述下架的底部安装有清洗机构,所述下架的顶部安装有上架,所述上架和下架为垂直安装;所述上架的内部中心位置设置有nb无线控制模块、电源模块、气动控制模块以及通讯模块,所述上架和下架的端部设置有平移气缸,所述平移气缸的固定端与上架和下架的端部固定连接,所述平移气缸的活动端与所述抓取机构连接;所述下架与所述清洗机构的机架固定连接,所述下架的中心位置设置
有第二电机,所述第二电机的输出端穿过所述清洗机构的机架。
8.在进一步的实施例中,所述清洗机构包括,前盖,固定连接于所述机架前端;后盖,固定连接于所述机架后端;所述前盖的一侧设置有第一电机,所述后盖的同一侧设置有从动轮,所述第一电机的输出端连接有主动轮,所述主动轮和所述从动轮之间通过传送带连接,所述主动轮和从动轮分别通过轴承连接有清洗轮的一端,所述清洗轮分别设置在所述前盖和后盖的内部,所述清洗轮通过轴承与所述前盖和后盖的内部传动连接;所述机架的内部设置有两组清洗盘,所述清洗轮的输入端被设置为转动轴通过齿轮配合与所述第二电机的输出端传动连接。
9.在进一步的实施例中,所述抓取装置包括:伸缩气缸,所述伸缩气缸垂直方向连接于所述平移气缸的活动端,所述伸缩气缸的活动端设置在下架的一侧;所述伸缩气缸的活动端连接有吸盘托,所述吸盘托被设置为三角结构,每一个角上均设置有一组吸盘,所述吸盘通过固定轴与所述吸盘托连接,每组吸盘均设置有气道,通过所述气道与所述气动控制模块连接。
10.在进一步的实施例中,所述nb无线模块包括:驱动接口,至少包括以下类型:gpio、uart和timer;通信协议接口,至少包括以下类型:tcp/udp、mqtt。
11.在进一步的实施例中,所述nb无线模块包括:驱动接口,至少包括以下类型:gpio、uart和timer;通信协议接口,至少包括以下类型:tcp/udp、mqtt。
12.在进一步的实施例中,所述气动控制模块设置有至少三组气路,第一组气路设置有四条分路控制四组平移气缸的活动,第二组气路设置有四条分路控制四组伸缩气缸的活动,第三组气路分四路控制每组吸取机构上所有吸盘的吸取工作。
13.一种基于nb模块的自动化玻璃清洗装置的清洗方法,包括以下步骤:步骤一:准备工作,通过所述无线nb模块设置整体的清洗时间和单个位置的清洗时间;步骤二:在玻璃上开启玻璃清洗装置,所述nb无线模块通过控制气动控制模块,使得所述抓取机构上的吸盘吸紧玻璃;所述第二电机开始转动带动所述机架内部的清洗盘转动开始对玻璃进行清洗,所述第一电机转动带动主动轮转动,动力有传送带传递至从动轮上,两组清洗轮开始转动;待单个位置的清洗时间完毕后,由时间传感器检测清洗位置是否清洗干净,如未能清洗干净则再次进行一轮清洗,如清洗干净则开始开一个点位的清洗;步骤三:当开始下一个点位的清洗工作时,沿前进方向上的一组吸取机构松开,该组吸取机构上的伸缩气缸收缩,使得吸盘离开玻璃面;此时平移气缸使得吸取机构开始工作,控制该吸取机构单个方向上的活动;所述红外传感器用于检测吸取机构前后方向上的障碍,保证吸取机构的正常移动;每次只进行单个吸取机构的移动,其余三组吸取机构保持吸紧状态,故整个玻璃清洗装置能够顺利的在玻璃上完成清晰、移动和越障等工作。
14.本发明通过一个无线nb模块替代传统机械控制中的单片机或工控机,不仅仅节约了制造成本,无线nb模块有着更小的体积更低的质量,减小了整个装置的质量,保证吸取时更不容易发生掉落;相较于传统的玻璃清洗装置的移动方式,本发明申请所采用的分段式的移动方式更可靠,且设置有视觉传感器保证清洗效果,红外传感器保证移动是时能够跨越障碍,更加实用,使用的环境也更加的灵活。
附图说明
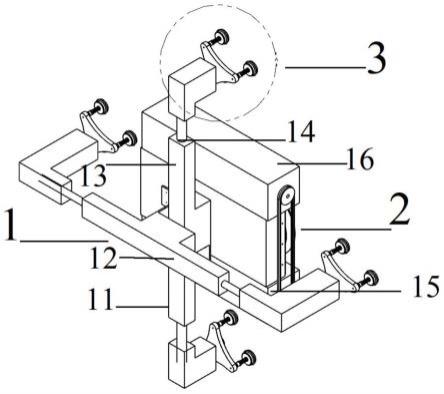
15.图1是本发明的整体结构示意图;图2是本发明整体的底视图;图3是本发明抓取机构局部视图;图4是本发明控制系统的连接示意图。
16.附图标记为:本体1、下架11、上架12、平移气缸13、汽缸盖14、前盖15、后盖16、清洗机构2、清洗轮21、第一电机22、从动轮23、传动带24、第二电机25、转动轴26、清洗盘27、抓取机构3、伸缩气缸31、吸盘托32、气道33、吸盘34、固定轴承35。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.实施例1结合附图1对本发明进行具体说明,一种基于nb模块的自动化玻璃清洗装置,本体1,其内部设置有控制机构;清洗机构2,设置于所述本体1的底部,所述清洗机构2至少存在两个不同的清洗方向;抓取装置,安装于所述本体1的端部;其中,所述抓取装置存在沿着本体1端部方向的平移自由度以及所述本体1上下方向上的平移自由度。
19.在进一步的实施例中,所述控制机构中的主控被设置为nb无线模块,无线nb模块的特点是:nb模组已经从简单指令交互的方式发展到现在opencpu的开发方式,为简易应用的环保装置提供了更好的解决方案,在本发明申请中所述nb无线模块包括:驱动接口,至少包括以下类型:gpio、uart和timer;通信协议接口,至少包括以下类型:tcp/udp、mqtt;在进一步的实施例中,所述控制机构,包括:nb无线模块,其采用open cpu的模组;电源模块,电连接于所述nb无线模块;气动控制模块,电连接于所述nb无线模块;传感器模块,设置于所述清洗机构2上,所述传感器模块电连接于所述nb无线模块;还包括:本体1通讯模块,与所述nb无线模块存在通讯连接;所述传感器模块包括:视觉传感器,设置于所述机架上,用于检测前方玻璃上的杂物;红外传感器用于检测前方的障碍。
20.实施例2结合附图1和附图2对本发明中的本体1进行描述,包括:下架11,所述下架11的底部安装有清洗机构2,所述下架11的顶部安装有上架12,所述上架12和下架11为垂直安装;所述上架12的内部中心位置设置有nb无线控制模块、电源模块、气动控制模块以及通讯模块,所述上架12和下架11的端部设置有平移气缸13,所述平移气缸13的固定端与上架12和下架11的端部固定连接,所述平移气缸13的活动端与所述抓取机构3连接;所述下架11与所述清洗机构2的机架固定连接,所述下架11的中心位置设置有第二电机25,所述第二电机25的输出端穿过所述清洗机构2的机架。附图2中,所述清洗机构2包括,前盖15,固定连接于所述机架前端;后盖16,固定连接于所述机架后端;所述前盖15的一侧设置有第一电机22,所述后盖16的同一侧设置有从动轮23,所述第一电机22的输出端连接有主动轮,所述主动轮和所述从动轮23之间通过传送带连接,所述主动轮和从动轮23分别通过轴承连接有清洗轮
21的一端,所述清洗轮21分别设置在所述前盖15和后盖16的内部,所述清洗轮21通过轴承与所述前盖15和后盖16的内部传动连接;所述机架的内部设置有两组清洗盘27,所述清洗轮21的输入端被设置为转动轴26通过齿轮配合与所述第二电机25的输出端传动连接。附图3中所述抓取装置包括:伸缩气缸31,所述伸缩气缸31垂直方向连接于所述平移气缸13的活动端,所述伸缩气缸31的活动端设置在下架11的一侧;所述伸缩气缸31的活动端连接有吸盘34托32,所述吸盘34托32被设置为三角结构,每一个角上均设置有一组吸盘34,所述吸盘34通过固定轴与所述吸盘34托32连接,每组吸盘34均设置有气道33,通过所述气道33与所述气动控制模块连接。
21.在进一步的实施例中,为保证气路能够实现单独的控制每一个吸取机构的吸取或移动,所述气动控制模块设置有至少三组气路,第一组气路设置有四条分路控制四组平移气缸13的活动,第二组气路设置有四条分路控制四组伸缩气缸31的活动,第三组气路分四路控制每组吸取机构上所有吸盘34的吸取工作。
22.实施例3一种基于nb模块的自动化玻璃清洗装置的清洗方法,包括以下步骤:步骤一:准备工作,通过所述无线nb模块设置整体的清洗时间和单个位置的清洗时间;步骤二:在玻璃上开启玻璃清洗装置,所述nb无线模块通过控制气动控制模块,使得所述抓取机构3上的吸盘34吸紧玻璃;所述第二电机25开始转动带动所述机架内部的清洗盘27转动开始对玻璃进行清洗,所述第一电机22转动带动主动轮转动,动力有传送带传递至从动轮23上,两组清洗轮21开始转动;待单个位置的清洗时间完毕后,由时间传感器检测清洗位置是否清洗干净,如未能清洗干净则再次进行一轮清洗,如清洗干净则开始开一个点位的清洗;步骤三:当开始下一个点位的清洗工作时,沿前进方向上的一组吸取机构松开,该组吸取机构上的伸缩气缸31收缩,使得吸盘34离开玻璃面;此时平移气缸13使得吸取机构开始工作,控制该吸取机构单个方向上的活动;所述红外传感器用于检测吸取机构前后方向上的障碍,保证吸取机构的正常移动;每次只进行单个吸取机构的移动,其余三组吸取机构保持吸紧状态,故整个玻璃清洗装置能够顺利的在玻璃上完成清晰、移动和越障等工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1