清洁系统、清洁机器人的回位检测方法以及储存介质与流程
本申请涉及清洁机器人的,具体而言,涉及一种清洁系统、清洁机器人的回位检测方法以及储存介质。
背景技术:
1、在相关的技术领域中,清洁机器人在工作过程中,往往需要返回基站补水、清洗和充电,通常,机器人回到基站后会触动基站上的机械微动开关,基站检测到微动开关动作,以确定当前清洁机器人回位,进而基站开始执行为清洁机器人补水、清洗和充电的程序。
技术实现思路
1、本申请实施例提供了一种清洁系统、清洁机器人的回位检测方法以及储存介质,旨在通过基站控制器检测检测电路是否与被测电路连接,以判断清洁机器人是否回位,从而无需使用机械微动开关,以延长清洁系统的使用寿命。
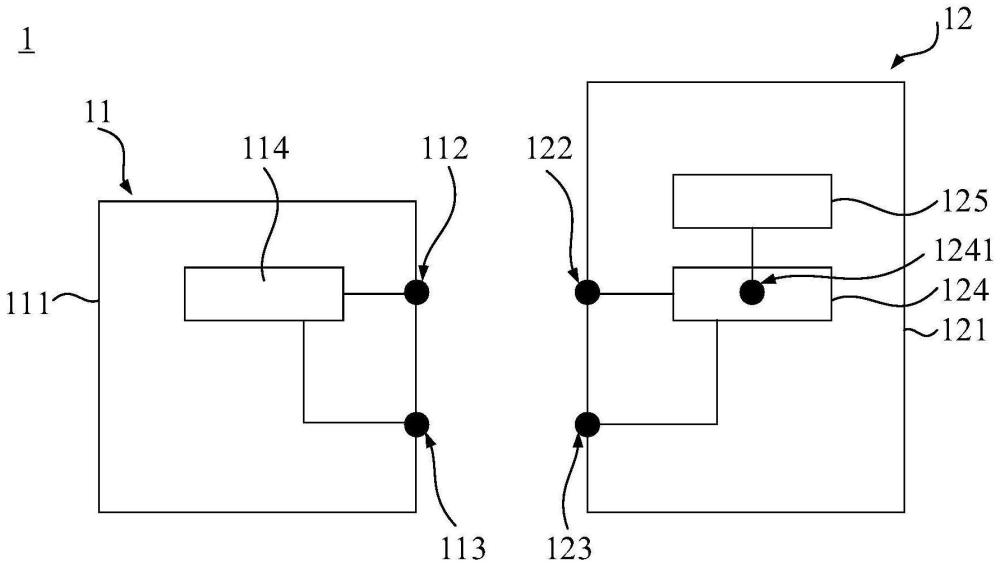
2、第一方面,本申请实施例提供了一种清洁系统,包括清洁机器人以及基站,清洁机器人包括机器人壳体、受电正极、受电负极以及被测电路,受电正极以及受电负极相互绝缘且设置于机器人壳体表面,被测电路与受电正极以及受电负极电连接;基站包括基站壳体、用于与受电正极连接的供电正极、用于与受电负极连接的供电负极,检测电路以及基站控制器,供电正极以及供电负极相互绝缘且设置于基站壳体表面,检测电路与供电正极以及供电负极连接,检测电路具有采样节点,采样节点与基站控制器电连接,基站控制器根据采样节点输出的采样电压判断清洁机器人是否回位。
3、基于上述实施例,基站控制器从采样节点获取采样电压,采样电压为第一预设电压时,表示受电正极与供电正极连接,受电负极与供电负极连接,也即清洁机器人已回位,从而可以防止因为机械开关的损坏导致的清洁系统无法使用,进而可以延长清洁系统的使用寿命。
4、第二方面,本申请实施例提供了一种清洁机器人的回位检测方法,基于上述清洁系统实现,且应用于基站,清洁机器人的回位检测方法包括以下步骤:
5、获取检测电路的采样节点输出的采样电压;
6、在获取到的采样电压为第一预设电压时,确定清洁机器人回位。
7、基于上述实施例,当基站控制器获取到的采样节点的采样电压为第一预设电压时,基站控制器判断清洁机器人回位。
8、第三方面,本申请实施例还提供了一种储存介质,储存介质储存有多条指令,指令适于由处理器加载并执行清洁机器人的回位检测方法的步骤。
9、基于本申请的一种清洁系统,包括清洁机器人以及基站,清洁机器人包括机器人壳体、受电正极、受电负极以及被测电路,受电正极以及受电负极相互绝缘且设置于机器人壳体表面,被测电路与受电正极以及受电负极电连接;基站包括基站壳体、用于与受电正极连接的供电正极、用于与受电负极连接的供电负极,检测电路以及基站控制器,供电正极以及供电负极相互绝缘且设置于基站壳体表面,检测电路与供电正极以及供电负极连接,检测电路具有采样节点,采样节点与基站控制器电连接,基站控制器根据采样节点输出的采样电压判断清洁机器人是否回位。基站控制器从采样节点获取采样电压,采样电压为第一预设电压时,表示受电正极与供电正极连接,受电负极与供电负极连接,也即清洁机器人已回位。
技术特征:
1.一种清洁系统,其特征在于,包括:
2.如权利要求1所述的清洁系统,其特征在于,所述检测电路包括:
3.如权利要求1所述的清洁系统,其特征在于,所述检测电路包括:
4.如权利要求1所述的清洁系统,其特征在于,所述被测电路包括电阻、电容以及电感器中的至少一种。
5.如权利要求1-4任一项所述的清洁系统,其特征在于,
6.一种清洁机器人的回位检测方法,其特征在于,基于如权利要求1-5任一项所述的清洁系统实现,且应用于所述基站,所述清洁机器人的回位检测方法包括以下步骤:
7.如权利要求6所述的清洁机器人的回位检测方法,其特征在于,所述基站还包括供电电路,所述在获取到的所述采样电压为第一预设电压时,确定所述清洁机器人回位的步骤之后,包括:
8.如权利要求7所述的清洁机器人的回位检测方法,其特征在于,所述控制所述供电电路向所述清洁机器人充电的步骤包括:
9.如权利要求7所述的清洁机器人的回位检测方法,其特征在于,所述控制所述供电电路向所述清洁机器人充电的步骤之后,还包括:
10.如权利要求6所述的清洁机器人的回位检测方法,其特征在于,所述获取所述检测电路的所述采样节点输出的采样电压的步骤之后,还包括:
11.如权利要求6-10任一项所述的清洁机器人的回位检测方法,其特征在于,所述清洁机器人包括受电电路,所述获取所述检测电路的所述采样节点输出的采样电压的步骤之后,还包括:
12.一种储存介质,其特征在于,所述储存介质储存有多条指令,所述指令适于由处理器加载并执行如权利要求6-11任一项所述的清洁机器人的回位检测方法的步骤。
技术总结
本申请实施例公开了一种清洁系统、清洁机器人的回位检测方法以及储存介质,清洁系统包括清洁机器人以及基站,清洁机器人包括机器人壳体、受电正极、受电负极以及被测电路,受电正极以及受电负极相互绝缘且设置于机器人壳体表面,被测电路与受电正极以及受电负极电连接;基站包括基站壳体、用于与受电正极连接的供电正极、用于与受电负极连接的供电负极,检测电路以及基站控制器,供电正极以及供电负极相互绝缘且设置于基站壳体表面,检测电路与供电正极以及供电负极连接,检测电路具有采样节点,采样节点与基站控制器电连接,基站控制器根据采样节点输出的采样电压判断清洁机器人是否回位。
技术研发人员:林宋荣
受保护的技术使用者:安克创新科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!