一种预防摔倒的幼儿智能学步车
本发明属于行走辅助领域,具体涉及一种预防摔倒的幼儿智能学步车,辅助幼儿行走并保护其安全。
背景技术:
1、幼儿在8-12个月期间是最好的学步年龄,在此之前会经历翻身、坐、滚、爬、扶着走等五个步骤,锻炼肢体的力量,为学步打下基础。到了学步阶段,学步车是幼儿真正掌握行走技巧前的代步工具,可以适度辅助宝宝学习走路,目前,市面上的学步车种类繁多,按大类可分为手推式和包围坐式。
2、手推式学步车一般具有一定阻力,使用时幼儿站立通过双手推动车子往前移动,行走的速度可以由幼儿控制,学习走路的自主性较强,但是手推式学步车多数在幼儿左右、后面没有围挡,即使幼儿在学步过程中会手抓着推车的把手,但由于幼儿下肢无力,容易出现摔倒现象:要么双腿弯曲,身体后仰;要么双腿或单腿呈跪姿,身体向前、左前、右前倾倒。因此使用过程中需要家长紧随身旁,避免摔倒。
3、包围坐式学步车将幼儿包围在学步车的中间位置,通过一圈围挡把幼儿围住,为幼儿提供了全方位的保护,使用时幼儿可以坐在学步车里的坐垫上,也可以站立,通过幼儿的身体移动,可以借助车轮毫不费力地滑行。包围坐式学步车的缺点在于通过高限制的围合来防止幼儿摔倒,柔性坐垫兜在幼儿腿间限定幼儿臀部位置,幼儿缺乏真正的锻炼,易于形成不良的腿部走路姿态,而且学步车的速度也很难控制,容易出现侧翻。
4、目前市面上无论是手推式学步车、包围坐式学步车都存在视野不开阔、前方视线受阻、智能化程度低的缺陷,无法主动对周围障碍物做出躲避,不能主动在幼儿将要摔倒时启动保护,也不能实现让不在身边的父母看到幼儿的学步情况;且功能单一,在经过学步时期的短暂半年之后便失去作用,占地空间大,不方便拆卸。
技术实现思路
1、要解决的技术问题:
2、为了避免现有技术的不足之处,本发明提供一种预防摔倒的幼儿智能学步车,利用多种传感器和控制中心实现学步车使用过程中主动躲避障碍物,监测幼儿是否将要摔倒,在其有摔倒倾向时,利用保护系统通过机械传动自然地扶住幼儿的腿部或臀部,防止其摔倒;并且在学步之外可以作为手推车使用;通过安装通信装置和摄像头实现远程观看幼儿学步状态。本发明解决了现有的学步车不够智能、视野受阻、无法主动柔和地保护幼儿防止其摔倒及功能单一的问题。
3、本发明的技术方案是:一种预防摔倒的幼儿智能学步车,包括学步车主体、腿部保护系统3、臀部保护系统4、运动监测系统、控制中心、通信装置;所述学步车主体作为支撑框架围于使用者的两侧和后方,其底部设置有滚动组件;
4、通过所述腿部保护系统3对使用者摔倒过程中腿部进行防护支撑;
5、通过所述臀部保护系统4对使用者摔倒过程中臀部进行防护支撑;
6、通过所述运动监测系统监测使用者的运动状态,并将数据传递给控制中心处理;
7、通过所述控制中心收集运动监测系统获得的数据,并对执行端发出指令;
8、所述通信装置与控制中心相连,并通过无线网络与手持终端连接,用于将学步车的信息传递给手持终端。
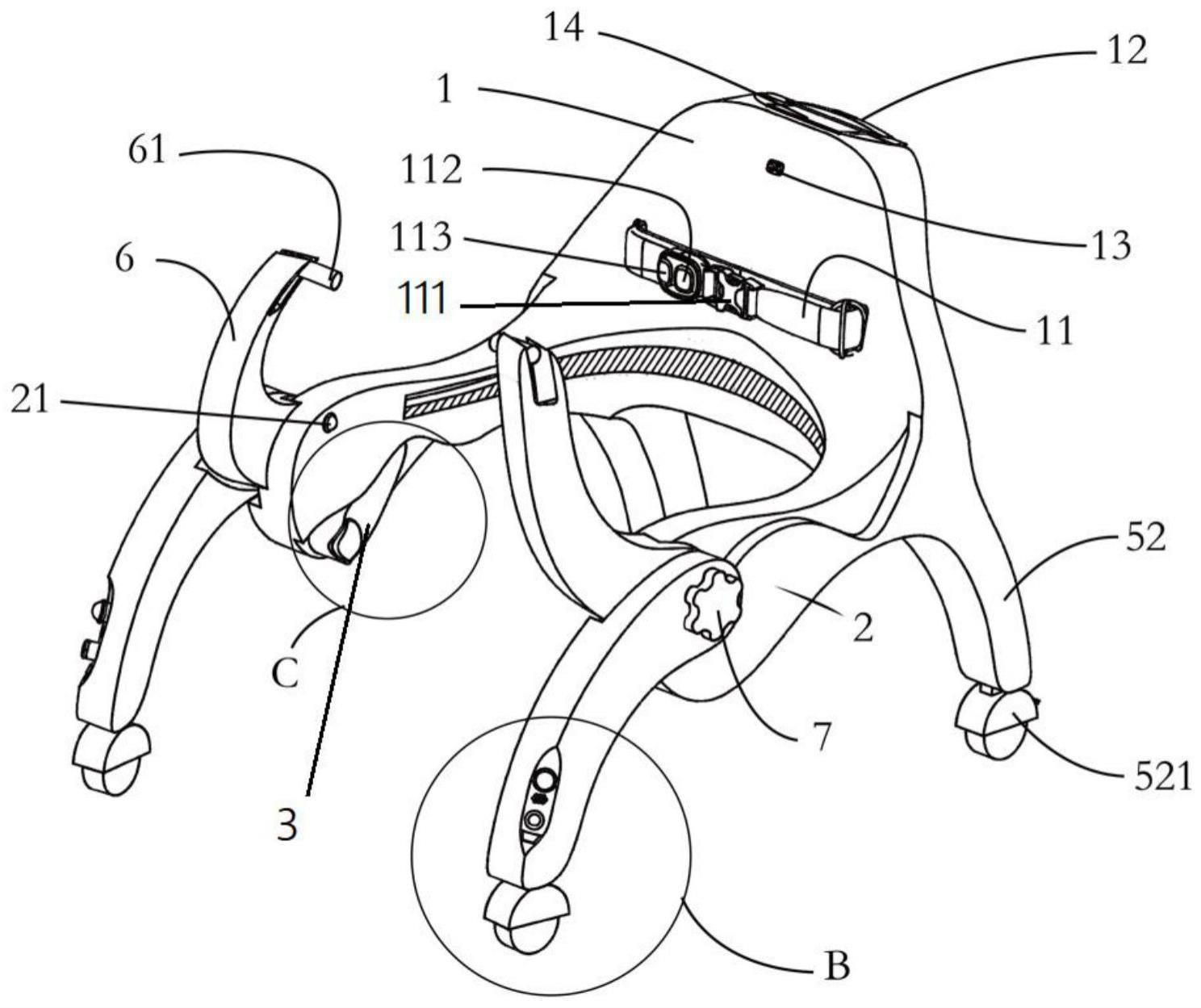
9、本发明的进一步技术方案是:所述学步车主体包括位于使用者后方的背部主体1,位于两侧的侧方主体2、两个前支撑腿51和两个后支撑腿52,所述背部主体1、两侧的侧方主体2和后支撑腿52为整体结构,两个后支撑腿52位于背部主体1下方两侧,两个前支撑腿51分别安装在左、右两边的侧方主体2前端;
10、所述背部主体1设有内部空腔,作为容纳收起时的臀部保护系统4,其内侧下方沿周向开有半环槽,该半环槽的两端延伸至两侧的侧方主体2,半环槽与内部空腔连通,作为臀部保护系统4执行时的出口。
11、本发明的进一步技术方案是:所述腿部保护系统3为两套,对称安装于两侧的侧方主体2内侧;腿部保护系统3包括腿部第一电机、腿部第一齿轮33、限位滑轨34、第一齿条32和扶腿板31;所述腿部第一电机安装在侧方主体2的内侧前端,其输出轴上安装的第一齿轮33与第一齿条32啮合,所述第一齿条32通过限位滑轨34滑动安装于侧方主体2的内侧面上;所述扶腿板31安装于第一齿条32的外端面;通过第一电机驱动第一齿轮33,并带动第一齿条32沿限位滑轨34倾斜滑动,进而完成对扶腿板31执行与收起时的位置切换控制;所述扶腿板31的上表面前端安装有软垫311,用于保证扶腿时的舒适性。
12、本发明的进一步技术方案是:所述臀部保护系统4包括臀部限位滑轨45、滑动链条44、背部齿轮42、弹簧带43、臀部齿轮41;两条所述臀部限位滑轨45对称安装于背部主体1的内部两侧,并分别延伸至两侧的侧方主体2内部,两条所述滑动链条44对称安装在两条臀部限位滑轨45上,能沿臀部限位滑轨45从其收起位置即背部主体1内滑至执行位置侧方主体2内;
13、两个所述背部齿轮42为一组,对称安装在两侧臀部限位滑轨45的轨道下方,分别与收起位置的两侧滑动链条44头部位置啮合;所述背部齿轮42通过背部电机驱动;若干所述弹簧带43并列设置,其两端分别固定于两侧的滑动链条44上;
14、两个所述臀部齿轮41为一组,对称安装在两边臀部限位滑轨45的轨道下方,分别与执行位置的两侧滑动链条44尾部位置啮合;所述臀部齿轮41通过臀部电机驱动;
15、臀部保护系统4收起时位于背部主体1内部的空腔;触发时,背部电机驱动背部齿轮42转动,带动两侧的滑动链条44沿臀部限位滑轨45下滑,同时臀部电机驱动臀部齿轮41转动,继续带动滑动链条44下滑至侧方主体2内;同时通过弹簧带43支撑使用者臀部防止摔倒。
16、本发明的进一步技术方案是:所述滑动链条44采用空心销轴链条,由销轴443、滚筒441、长垫片442组成,所述滑动链条44内侧的长垫片442上带有锁扣444,用于固定弹簧带43。
17、本发明的进一步技术方案是:所述背部主体1还包括安全带11、可伸缩推拉杆12和显示屏14;所述安全带11安装于背部主体1上,通过安全带11限制使用者的活动范围、用以防护;所述可伸缩推拉杆12安装在背部主体1的背面上端,用于将学步车作为手推车时使用;所述显示屏14安装在背部主体的上端面,用于显示智能学步车行走的速度、已行走路程、步数及幼儿使用过程中的预摔倒次数信息;
18、所述两个前支撑腿51上安装有照明灯512、音响513,所述照明灯512用于当周围环境过暗时进行照明;所述音响513用于播放音乐、监护人的招呼声、铃铛声。
19、本发明的进一步技术方案是:所述滚动组件包括万向轮511、固定轮521、刹车部件523,两个所述万向轮511分别安装在两个前支撑腿51下端,两个所述固定轮521分别在两个后支撑腿52下端,两个所述刹车部件523分别安装在两个固定轮521上,所述刹车部件523通过刹车电机驱动。
20、本发明的进一步技术方案是:所述运动监测系统包括摄像头21、距离传感器514、红外测距传感器13、速度传感器522、加速度计112、记步传感器113、光敏电阻片515,所述摄像头21嵌装于侧方主体2的内侧面,用于观察使用者学步时的状态;多个所述距离传感器514安装在两个前支撑腿51上,用于判断学步车到前方和左右的障碍物的距离;所述红外测距传感器13嵌装于背部主体1的上端中间位置,用于实时监测使用者的背部到背部主体1的距离;所述速度传感器522安装在一侧后支撑腿52上,用于监测学步车的实时速度;所述加速度计112和记步传感器113穿插在安全带11上,加速度计112用于监测使用者实时加速度,记步传感器113用于监测使用者行走步数;两个所述光敏电阻片515分别安装在两个前支撑腿51上,用于监测学步车使用环境光照强度,与所述照明灯512配合使用。
21、本发明的进一步技术方案是:所述幼儿智能学步车还包括手扶臂6、手柄61,两个所述手扶臂6分别安装于左、右两侧的侧方主体2的前端;所述手柄61通过转轴与手扶臂6连接;
22、所述手扶臂6、前支撑腿51及侧方主体2上均设有安装孔,三者之间通过长旋钮7插入安装孔固定;所述长旋钮7包括旋钮头和杆部,长旋钮7的杆部设有多个轴向齿槽,手扶臂6、前支撑腿51和侧方主体2的安装孔内均设有与长旋钮7杆部齿槽匹配的齿牙,通过调整手扶臂6绕长旋钮7的角度,使手扶臂6上齿牙卡进不同的齿槽内实现手扶臂6高度调整;通过调整前支撑腿51绕长旋钮7的角度,使支撑腿51上齿牙卡进不同的齿槽内实现全车长度以及臀部保护系统4放下后形成的座椅所在高度的调节。
23、本发明的进一步技术方案是:所述控制中心为单片机,所述腿部保护系统3、臀部保护系统4、刹车部件523、照明灯512、音响513、显示屏14均与控制中心连接,为执行端,受控制中心控制。
24、有益效果
25、本发明的有益效果在于:本发明通过运动监测系统所包括的摄像头、距离传感器、红外测距传感器、速度传感器、加速度计、记步传感器等传感器获得的数据信号,作为控制中心的判断依据,产品更加智能化,当控制中心判定为幼儿有向前方、左前方或右前方摔倒的趋势时,腿部保护系统运行,在幼儿腿部摔倒着地前将其扶起,防止幼儿受到伤害;当控制中心判定为幼儿有向后方倾倒的趋势时,臀部保护系统运行,在幼儿臀部后仰倾倒着地前将其撑住,防止其受到伤害;当控制中心判定为幼儿距离障碍物较近时,刹车部件缓慢运行,轻缓阻止幼儿继续移动,防止用力过猛绊倒幼儿;在上述三种幼儿非正常行走状态下,前支撑腿上的音响会发出警报,提醒监护人来帮助幼儿;当幼儿恢复安全行走状态后,各保护系统收回,音响关闭,幼儿继续学步。
26、本发明预防摔倒的幼儿智能学步车,在幼儿正常行走时,监测系统所获信号正常,显示屏显示学步车行走的速度(即幼儿行走的速度)、已行走路程、步数、在整个过程中幼儿有多少次前倾摔倒趋势和后仰摔倒趋势等信息;显示屏上的数据信息及摄像头获得的图像画面均可通过通信装置发送到家长的手持终端上。
27、本发明臀部保护系统收起时,背部齿轮将滑动链条卡住,执行时,两个背部齿轮,两个臀部齿轮转动,链条受到重力与齿轮旋转的推力作用,高速下滑,可以在幼儿后仰倒地前快速反应,支撑起其臀部;腿部保护系统同理,收起时腿部第一齿轮将第一齿条卡住,运行时腿部第一齿轮转动,第一齿条受到重力与腿部第一齿轮旋转的推力作用,高速斜向下滑动,可以在幼儿前倾倒地前快速反应,扶起其腿部;且臀部保护系统与腿部保护系统放下时运动方向均与幼儿摔倒时身体运动方向垂直,不会冲撞伤害幼儿,给幼儿提供更柔和、舒缓、自然的保护。而在保护系统收起时,幼儿始终处于正常健康的手推式学步过程中,能得到正确的锻炼,体现出对幼儿的关怀。
28、本发明学步车可变身手推车,本发明中臀部保护系统放下时可起到座椅的作用,在外出使用时,按压显示屏上按键,控制臀部保护系统放下,拉出背部主体后方的可伸缩推拉杆,即可作为手推车使用,父母推着幼儿出门游玩;当光线较暗时,即光敏电阻片感应到光照亮度低于20勒克斯时,照明灯自动打开,光照亮度恢复正常后关闭。
29、本发明通过长旋钮将手扶臂、前支撑腿和侧方主体固定起来,长旋钮上有多个齿槽设计,便于拆解调节:将手扶臂上的齿牙旋转卡进不同的齿槽内,可以实现其所在位置的分档调节,适应不同身高、臂长的幼儿;将前支撑腿上的齿牙旋转卡进不同的齿槽内,可以实现全车长度以及臀部保护系统放下后形成的座椅所在高度的分档调节,适应不同活动范围尺寸、走路习惯的幼儿;在不使用时,也方便将全车分体存放。
30、本发明预防摔倒的幼儿智能学步车,车体主体在幼儿两侧和后方,当幼儿学步时,前方视野内只有两个手柄阻挡,幼儿可以自己观察前方所有路况,开阔的视野能从心理上减轻幼儿学步时对前方未知路况的恐惧。
- 还没有人留言评论。精彩留言会获得点赞!