作业车辆的控制方法与流程
作业车辆的控制方法
[0001]
本申请是国际申请号pct/jp2017/000413,国家阶段申请号201780002782.4、申请日2017年1月10日、发明名称为“作业车辆以及控制方法”的申请的分案申请。
技术领域
[0002]
本发明涉及作业车辆以及作业车辆的控制方法。
背景技术:
[0003]
近年来,在作为作业车辆的油压挖掘机中,如国际公开第2015/186180号(专利文献1)所公开的那样,将由油压式的操作装置生成的油压经由基于来自控制器的指示而动作的控制阀向方向控制阀的先导室引导。
[0004]
在先技术文献
[0005]
专利文献
[0006]
专利文献1:国际公开2015/186180号
技术实现要素:
[0007]
发明要解决的课题
[0008]
在专利文献1的作业车辆中,在油压源与控制阀之间夹设有操作装置,因此,控制阀被传递由操作装置减压后的油压。这样,由于控制阀被传递受到了操作员对操作装置进行操作的影响的油压,因此,存在控制阀无法生成与控制器的指示相应的指令先导压的可能性。
[0009]
本发明的目的在于,提供一种能够生成与控制器的指示相应的指令先导压的作业车辆以及作业车辆的控制方法。
[0010]
用于解决课题的方案
[0011]
根据本发明的某一方案,作业车辆具备:油压式的操作装置,其用于使致动器动作;控制器,其生成与操作装置的操作量相应的指令电流;电磁比例控制阀,其生成与指令电流相应的指令先导压;以及阀,其基于指令先导压对使致动器动作的工作油的流量进行调整。电磁比例控制阀设置于将油压源与阀连结的第一油路,利用从油压源供给的油压来生成指令先导压。操作装置设置于与第一油路不同的第二油路。
[0012]
发明效果
[0013]
根据本发明,能够生成与控制器的指示相应的指令先导压。
附图说明
[0014]
图1是对作业车辆的外观进行说明的图。
[0015]
图2是示出驾驶室的内部结构的立体图。
[0016]
图3是表示作业车辆的硬件结构的图。
[0017]
图4是用于说明铲斗控制功能的图。
[0018]
图5是用于说明主控制器的功能结构的功能框图。
[0019]
图6是用于说明作业车辆中的处理流程的流程图。
[0020]
图7是操作装置的立体图。
[0021]
附图标记说明
[0022]
1行驶体,3回转体,4工作装置,5动臂,6斗杆,7铲斗,8驾驶室,9驾驶席,10行驶操作部,11、12行驶杆,13、14行驶踏板,17仪表盘,20锁定杆,35动臂缸,36斗杆缸,37铲斗缸,46斗杆销,47铲斗销,51操作装置,52主控制器,53监视装置,54发动机控制器,55发动机,56a主泵,56b先导用泵,57斜盘驱动装置,58先导油路,59电磁比例控制阀,60主阀,61操作装置用油路,62压力传感器,63油箱,64工作油用油路,100作业车辆,511、519操作杆,512操作检测器,513按钮开关,601滑柱,602先导室,800设计面,802斜面。
具体实施方式
[0023]
以下,基于附图对实施方式进行说明。在以下的说明中,针对同一部件标注相同的附图标记。它们的名称以及功能也相同。因此,不再重复关于它们的详细说明。
[0024]
从一开始就预定适当组合实施方式中的结构进行使用。另外,也存在不使用一部分构成要素的情况。
[0025]
以下,参照附图对作业车辆进行说明。需要说明的是,在以下的说明中,“上”、“下”、“前”、“后”、“左”、“右”是以落座于作业车辆的驾驶席的操作员为基准的用语。
[0026]
<a.整体结构>
[0027]
图1是对实施方式的作业车辆100的外观进行说明的图。
[0028]
如图1所示,作为作业车辆100,在本例中以油压挖掘机举例进行说明。
[0029]
作业车辆100主要具有行驶体1、回转体3以及工作装置4。作业车辆主体由行驶体1和回转体3构成。行驶体1具有左右一对履带。回转体3装配为能够经由行驶体1的上部的回转机构进行回转。
[0030]
工作装置4在回转体3中被轴支承为能够沿上下方向工作,进行砂土的挖掘等的作业。工作装置4包括动臂5、斗杆6、铲斗7、动臂缸35、斗杆缸36以及铲斗缸37。
[0031]
动臂5的基部以能够转动的方式与回转体3连结。斗杆6的基端部经由斗杆销46以能够转动的方式安装于动臂5的前端部。在斗杆6的前端部,经由铲斗销47以能够转动的方式连结有铲斗7。另外,回转体3包括驾驶室8等。
[0032]
需要说明的是,动臂缸35、斗杆缸36以及铲斗缸37是“致动器”的一例。
[0033]
<b.驾驶室的结构>
[0034]
图2是示出驾驶室8的内部结构的立体图。如图2所示,驾驶室8具有驾驶席9、行驶操作部10、仪表盘17、操作杆511、519、锁定杆20以及监视装置53。
[0035]
驾驶席9设置于驾驶室8的中央部。行驶操作部10设置于驾驶席9的前方。
[0036]
行驶操作部10包括行驶杆11、12和行驶踏板13、14。行驶踏板13、14能够与各行驶杆11、12一体地动作。行驶体1通过操作者向前方按压行驶杆11、12而前进。另外,行驶体1通过操作者向后方拉拽行驶杆11、12而后退。
[0037]
操作杆511设置于驾驶席9的右侧部。通过操作员沿前后对操作杆511进行操作,能够使动臂5上下动作。通过操作员沿左右对操作杆511进行操作,能够使铲斗7转动。例如,通
过将操作杆511向左操作,进行铲斗挖掘。通过将操作杆511向右操作,进行铲斗倾卸。
[0038]
操作杆519设置于驾驶席9的左侧部。通过操作员沿前后对操作杆519进行操作,能够使斗杆6转动。通过操作员沿左右对操作杆519进行操作,能够使回转体3回转。
[0039]
需要说明的是,基于操作杆511、519的上述的操作模式是一例,不局限于此。
[0040]
锁定杆20设置于操作杆519的附近。锁定杆20用于使工作装置4的操作、回转体3的回转以及行驶体1的行驶等功能停止。
[0041]
监视装置53对作业车辆100的发动机状态、指引信息、警告信息等进行显示。另外,监视装置53设置为能够受理与作业车辆100的各种动作相关的设定指示。
[0042]
<c.硬件结构>
[0043]
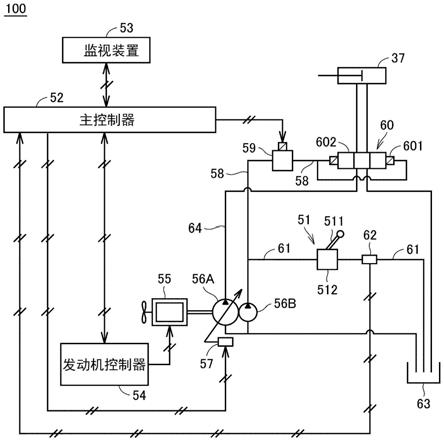
图3是表示作业车辆100的硬件结构的图。
[0044]
如图3所示,作业车辆100具备铲斗缸37、操作装置51、主控制器52、监视装置53、发动机控制器54、发动机55、主泵56a、先导用泵56b、斜盘驱动装置57、先导油路58、电磁比例控制阀59、主阀60、操作装置用油路61、压力传感器62、油箱63以及工作油用油路64。
[0045]
操作装置51包括操作杆511和对操作杆511的操作量进行检测的操作检测器512。主阀60具有滑柱601和先导室602。
[0046]
操作装置51是用于对工作装置4进行操作的装置。在本例中,操作装置51是油压式的装置,且是用于使至少铲斗缸37动作的装置。需要说明的是,通过铲斗缸37动作而使铲斗7转动。
[0047]
通过操作装置用油路61从先导用泵56b向操作装置51供给油。当作业车辆100的操作员对操作装置51的操作杆511进行操作时,将与操作杆511的操作量相应的压力的油向操作装置用油路61排出。
[0048]
压力传感器62检测从操作装置51排出的油的压力。压力传感器62将检测结果作为电信号向主控制器52输出。
[0049]
监视装置53以能够通信的方式与主控制器52连接。监视装置53向主控制器52通知操作员的输入指示。
[0050]
发动机55具有用于与主泵56a和先导用泵56b连接的驱动轴。通过发动机55的旋转,从主泵56a以及先导用泵56b排出工作油。作为一例,发动机55为柴油发动机。
[0051]
发动机控制器54按照来自主控制器52的指示对发动机55的动作进行控制。发动机控制器54按照来自主控制器52的指示来进行燃料喷射装置所喷射的燃料喷射量等的控制,由此对发动机55的转数进行调节。另外,发动机控制器54按照来自主控制器52的对主泵56a的控制指示来调节发动机55的发动机转数。
[0052]
主泵56a通过工作油用油路64而供给用于对工作装置4进行驱动的工作油。作为一例,主泵56a通过工作油用油路64以及主阀60向对工作装置4的铲斗7进行驱动的铲斗缸37供给工作油。在主泵56a上连接有斜盘驱动装置57。先导用泵56b对电磁比例控制阀59和操作装置51供给工作油。
[0053]
斜盘驱动装置57基于来自主控制器52的指示进行驱动,变更主泵56a的斜盘的倾斜角度。
[0054]
主控制器52是对作业车辆100整体进行控制的控制器,由cpu(central processing unit)、非易失性存储器、计时器等构成。主控制器52对发动机控制器54、监视
装置53进行控制。
[0055]
主控制器52从压力传感器62接收电信号。主控制器52生成与该电信号相应的指令电流。这样,主控制器52生成与操作装置51的操作量相应的指令电流。主控制器52将生成的指令电流向电磁比例控制阀59输出。
[0056]
需要说明的是,在本例中,针对主控制器52和发动机控制器54分别不同的结构进行了说明,但也可以采用共用的一个控制器。
[0057]
电磁比例控制阀59设置于将先导用泵56b与主阀60的先导室602连结的先导油路58,利用从先导用泵56b供给的油压,生成与来自主控制器52的指令电流相应的指令先导压。电磁比例控制阀59利用指令先导压对主阀60的滑柱601进行驱动。这样,电磁比例控制阀59基于指令电流,生成导向主阀60的指令先导压。
[0058]
主阀60设置在电磁比例控制阀59与使铲斗7转动的铲斗缸37之间。主阀60基于由电磁比例控制阀59生成的指令先导压来调整使铲斗缸37动作的工作油的流量。在本实施例中,通过从主阀60向铲斗缸37供给与滑柱601的位置相应的油量的工作油,从而铲斗7转动。
[0059]
油箱63是贮存供主泵56a以及先导用泵56b利用的油的油箱。从主泵56a排出的工作油通过铲斗缸37以及主阀60向油箱63返回。另外,从先导用泵56b排出的油通过操作装置51向油箱63返回。
[0060]
如以上那样,电磁比例控制阀59设置于将作为油压源的先导用泵56b与主阀60连结的先导油路58,利用从先导用泵56b供给的油压来生成指令先导压。操作装置51设置于与先导油路58不同的操作装置用油路61。通过操作装置用油路61,从先导用泵56b向操作装置51供给油。另外,通过了操作装置51的油不与先导油路58以及工作油用油路64合流而返回到油箱63。
[0061]
需要说明的是,操作装置51如上述那样是油压式的操作装置,但在作业车辆100中,作为类似电动杆方式的操作装置发挥功能。这样的操作装置51与电动杆方式的操作装置相比具有以下的优点。由于操作装置51的操作杆511的动作通过油压而传递至主控制器52,因此,能够维持按照以往的油压挖掘机中采用的油压先导方式的操作感。
[0062]
需要说明的是,主阀60、油压源、先导油路58、操作装置用油路61分别是“阀”、“先导用泵56b”、“第一油路”、“第二油路”的一例。
[0063]
<d.铲斗控制的概要>
[0064]
作业车辆100具有自动整地辅助功能。“自动整地辅助功能”是指,在操作了斗杆6时,以使铲斗7沿着设计面移动的方式使动臂5自动地上升的功能。另外,作业车辆100具有铲斗控制功能。“铲斗控制功能”是指,将相对于作业车辆100的主体的铲斗角度维持为固定的功能。铲斗控制功能在自动整地辅助发生功能的状态下被执行。
[0065]
图4是用于说明铲斗控制功能的图。
[0066]
如图4所示,作业车辆100在使铲斗7沿着设计面800朝箭头890的方向移动的情况下,利用铲斗控制功能而将相对于作业车辆100的主体的铲斗角度α维持为固定(在图4的情况下为角度α1)。需要说明的是,作业车辆100的主体(未图示)配置在设计面800中的水平的场所801。
[0067]
在作业车辆100对设计面800的斜面802进行整地的情况下,当将斜面802的倾斜度设为θ时,相对于斜面802的铲斗角度成为“α1+θ”,但如上所述,相对于作业车辆100的主体
的铲斗角度α被维持为固定(α1)。
[0068]
根据铲斗控制功能,在车身的坐标系统中,铲斗7的地面的倾斜度被维持为固定。需要说明的是,铲斗7与斗杆6所成的角度β如以β1以及β2例示那样逐渐变化。
[0069]
以下,针对在作业车辆100中,与操作员操作连动地使铲斗控制功能自动地开启或断开的结构进行说明。
[0070]
需要说明的是,铲斗控制功能是“自动控制功能”的一例。
[0071]
<e.主控制器的功能结构>
[0072]
图5是用于说明主控制器52的功能结构的功能框图。
[0073]
如图5所示,主控制器52具备自动整地辅助执行部520和停止处理部525。自动整地辅助执行部520具有铲斗控制执行部521。
[0074]
自动整地辅助执行部520将通过操作员选择了执行自动整地辅助功能的动作模式作为条件,进行用于执行自动整地辅助功能的控制。
[0075]
铲斗控制执行部521在执行自动整地辅助功能的动作模式中,将通过操作员选择了执行铲斗控制功能的动作模式作为条件,进行用于执行铲斗控制功能的控制。
[0076]
停止处理部525在铲斗控制功能的执行中受理到针对操作装置51的操作员操作(杆操作)时,使铲斗控制功能暂时停止。在该情况下,主控制器52基于该操作员操作使铲斗7转动。
[0077]
当操作员操作结束时,主控制器52维持操作员操作结束时的铲斗角度,在该状态下重新开始铲斗控制功能。
[0078]
这样,在铲斗控制功能的执行中操作装置51受理到操作员操作时,主控制器52将相对于作业车辆100的主体的铲斗角度变更为基于操作员操作的角度。
[0079]
需要说明的是,主控制器52在铲斗控制功能的执行中,基于压力传感器62的检测结果来判断操作装置51是否被操作。另外,铲斗角度α的变更通过控制向电磁比例控制阀59输出的电流来进行。
[0080]
如以上那样,在作业车辆100中,在铲斗控制功能的执行中,操作员操作优先于铲斗控制功能的执行。
[0081]
<f控制结构>
[0082]
图6是用于说明作业车辆100中的处理流程的流程图。
[0083]
如图6所示,在步骤s1中,主控制器52判断当前的动作模式是否是执行自动整地辅助功能的动作模式。主控制器52在判断为是执行自动整辅助功能的动作模式的情况下(在步骤s1中为是),在步骤s2中判断是否是执行铲斗控制功能的动作模式。主控制器52在判断为不是执行自动整辅助功能的动作模式的情况下(在步骤s1中为否),结束一系列的处理。
[0084]
主控制器52在判断为是执行铲斗控制功能的动作模式的情况下(在步骤s2中为是),在步骤s3中,一边执行铲斗控制功能一边执行自动整地辅助功能。主控制器52在判断为不是执行铲斗控制功能的动作模式的情况下(在步骤s2中为否),在步骤s8中,不执行铲斗控制功能而执行自动整地辅助功能。
[0085]
在步骤s4中,主控制器52判断是否受理到针对操作杆511的操作员操作。主控制器52在判断为受理到操作员操作的情况下(在步骤s4中为是),在步骤s5中,使铲斗控制功能暂时停止,并且基于操作员操作使铲斗7转动。主控制器52在判断为未受理到操作员操作的
情况下(在步骤s4中为否),将处理返回到步骤s2。
[0086]
在步骤s6中,主控制器52判断针对操作杆511的操作员操作是否结束。主控制器52在判断为操作员操作未结束的情况下(在步骤s6中为否),将处理返回到步骤s5。主控制器52在判断为操作员操作结束的情况下(在步骤s6中为是),在步骤s7中,以操作员操作结束时的铲斗角度α重新开始铲斗控制功能的执行。由此,当重新开始铲斗控制功能时,维持操作员操作结束时的铲斗角度。
[0087]
<g优点>
[0088]
对由上述结构得到的优点进行说明。
[0089]
(1)如图3所示,作业车辆100具备:用于使铲斗缸37动作的油压式的操作装置51;生成与操作装置51的操作量相应的指令电流的主控制器52;生成与指令电流相应的指令先导压的电磁比例控制阀59;以及基于指令先导压对使铲斗缸37动作的工作油的流量进行调整的主阀60。
[0090]
电磁比例控制阀59设置于将作为油压源的先导用泵56b与主阀60连结的先导油路58,利用从先导用泵56b供给的油压来生成指令先导压。操作装置51设置于与先导油路58不同的操作装置用油路61。
[0091]
根据这样的结构,电磁比例控制阀59设置于与操作装置51不同的油路。因此,与在操作装置的下游侧设置有电磁比例控制阀这样的结构不同,向电磁比例控制阀59供给的油的油压不会受到操作装置51的操作量的影响。指令先导压不被操作装置51减压而直接向电磁比例控制阀59传递来自先导用泵56b的油压。因此,根据作业车辆100,电磁比例控制阀59能够生成与主控制器52的指示相应的指令先导压。
[0092]
需要说明的是,在上述中,作为致动器的一例而以铲斗缸37为例进行了说明,但不局限于此。致动器也可以是动臂缸35或斗杆缸36等工作装置4用的其他缸。或者,致动器也可以是使回转体3旋转的致动器(油压马达)。
[0093]
(2)通过操作装置用油路61从先导用泵56b向操作装置51供给油。根据这样的结构,能够共用向操作装置51供给油的油压源与向电磁比例控制阀59供给油的油压源。
[0094]
(3)作业车辆100使通过了操作装置51的油不与先导油路58合流而返回到贮存供先导用泵56b利用的油的油箱63。根据这样的结构,通过了操作装置51的油不会用于指令先导压的生成。因此,作业车辆100能够利用从先导用泵56b供给的油压来生成指令先导压。
[0095]
(4)主控制器52具有将相对于作业车辆100的主体的铲斗角度维持为固定的铲斗控制功能。在铲斗控制功能的执行中操作装置51受理到操作员操作(杆操作)时,主控制器52将铲斗角度变更为基于操作员操作的角度。
[0096]
根据这样的结构,在铲斗控制功能的执行中,能够使操作员操作优先于铲斗控制功能的执行。
[0097]
(5)主控制器52在铲斗控制功能的执行中受理到针对操作装置51的操作员操作时,使铲斗控制功能暂时停止,基于该操作员操作使铲斗7转动。主控制器52在操作员操作结束时,维持该操作员操作结束时的铲斗角度。
[0098]
根据这样的结构,能够以操作员操作结束时的铲斗角度重新开始铲斗控制功能。
[0099]
(6)操作装置51具有操作杆511。上述操作员操作是针对操作杆511的操作。
[0100]
根据这样的结构,在铲斗控制功能的执行中,能够使针对操作杆511的操作员操作
优先于铲斗控制功能的执行。此外,能够以操作杆511的操作结束时的铲斗角度重新开始铲斗控制功能。
[0101]
<h.变形例>
[0102]
(第一变形例)
[0103]
在上述的实施方式中说明了如下结构:在铲斗控制功能的执行中受理到针对操作装置51的操作员操作时,使铲斗控制功能暂时停止,当操作员操作结束时重新开始铲斗控制。然而,不局限于此。
[0104]
例如,在铲斗控制功能的执行中操作装置51受理到操作员操作时,主控制器52也可以结束铲斗控制功能的执行。需要说明的是,在该情况下,即便操作员操作结束,主控制器52也不重新开始铲斗控制功能。
[0105]
根据这样的结构,在操作员判断为不需要铲斗控制这样的状况下,操作员能够仅通过对操作装置51进行操作来切断铲斗控制功能。
[0106]
(第二变形例)
[0107]
以下说明这样的结构:操作杆511具备按钮开关,通过对该按钮开关进行操作而使操作员操作在铲斗控制功能的执行中优先。
[0108]
图7是操作装置51的立体图。
[0109]
如图7所示,操作装置51的操作杆511具有按钮开关513。需要说明的是,按钮开关513的位置可以如图7所示那样位于操作杆511的上端(顶部),或者也可以位于侧部。
[0110]
主控制器52在铲斗控制功能的执行中按钮开关513被按下的情况下,在按钮开关513被按下的期间,使铲斗控制功能暂时停止,进行将铲斗缸37的缸长保持为固定的控制。由此,将铲斗7与斗杆6所成的角β维持为固定。在该情况下,铲斗角度α逐渐变化。当按钮开关513的按下结束时,以此时的铲斗角度α重新开始铲斗控制功能。
[0111]
根据这样的结构,操作员能够在将铲斗缸长维持为固定的状态下,使相对于作业车辆100的主体的铲斗角度α变化。
[0112]
需要说明的是,上述中以在右侧的操作杆511具有按钮开关513的结构为例进行了说明,但不局限于此。按钮开关513也可以设置于左侧的操作杆519。或者,按钮开关513也可以设置于例如仪表盘17等。
[0113]
此次公开的实施方式是例示,不仅仅局限于上述内容。本发明的范围由权利请求的范围示出,包含与权利请求的范围同等的含义以及范围内的全部变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1