钢结构架下潜定位安装用气囊浮力装置的制作方法
[0001]
本实用新型涉及一种钢结构架下潜定位安装用气囊浮力装置。
背景技术:
[0002]
在海工领域,诸如钻井平台、海上风电机架等大型钢结构架进行海上安装时,一般采用半潜船拖运到安装地点,然后采用起重船或浮吊等起重设备进行整体吊起来,下放到水中定位进行安装固定。由于这些设备都是露出海平面的,其吊点都在钢结构架的上部,吊钩的安装固定不需要下潜到水中,固定和解锁吊钩缆绳比较方便,施工效率高,具有一定的施工优势。但对于大型的钢结构架而言,比如自重在2000吨以上甚至万吨级的钢结构架,虽然其在水中有一定的浮力,但需要的起吊力也是很大的,如自重2500吨的25米高导管架,其开始从拖船吊起移动下来时,需要至少2500吨的起吊力才行;对于类似这样的导管架,采用半潜下水的方式,其进入水中时,其自身产生的浮力也就800吨左右,在最后的下潜状态仍然需要高达1700吨的起升力才能将导管架吊起;对于类似的导管架,也有采用滑移下水的,其自身依靠携带的浮筒提供浮力也能进行漂浮,但仍需要进行起吊船的扶正、吊起定位等。以上这些都需要具有一定起重能力的吊重船,所花费的费用也是巨大的。
技术实现要素:
[0003]
为解决以上技术上的不足,本实用新型提供了一种自升降式气囊浮力装置,能通过控制自身的浮力来实现下潜深度,从而达到钢结构架的定位和自行安装或拆除,节约了施工成本。
[0004]
本实用新型是通过以下措施实现的:
[0005]
一种钢结构架下潜定位安装用气囊浮力装置,安装在钢结构架上,包括分别设置在钢结构架前后左右四个方向的至少四组定位安装组件,每组定位安装组件均包括牵引机构、上滑轮组、下滑轮组和气囊,所述牵引机构和上滑轮组设置在钢结构架顶部,所述下滑轮组设置在钢结构架下部,所述气囊漂浮在钢结构架外侧,所述牵引机构上连接有牵引绳,所述牵引绳依次绕在上滑轮组和下滑轮组上,并且牵引绳末端与气囊的底部相连接,所述气囊顶部设置有充放气口,所述充放气口设置有快速接口和电动调节阀。
[0006]
上述还包括设置在钢结构架顶部的电子式水平仪和控制器,所述电子式水平仪与控制器的信号输入端信号连接,所述控制器的信号输出端与电动调节阀信号连接。
[0007]
上述气囊顶部设置有水位传感器,所述水位传感器与控制器的信号输入端信号连接。
[0008]
上述采用八组定位安装组件,钢结构架前后左右的每个方向上设置两组定位安装组件,八组定位安装组件前后对称、左右对称设置在钢结构架上。
[0009]
上述控制器设置在钢结构架顶部中心,所述上滑轮组设置在钢结构架顶部边缘,牵引机构设置在控制器与上滑轮组之间。
[0010]
上述气囊为上下延伸的长条状的圆柱形囊体。
[0011]
本实用新型的有益效果是:实现了钢结构架的下潜定位安装,以及钢结构架的自浮上升,节约施工成本,减少施工资源,特别是大中型安装船只资源的投入。
附图说明
[0012]
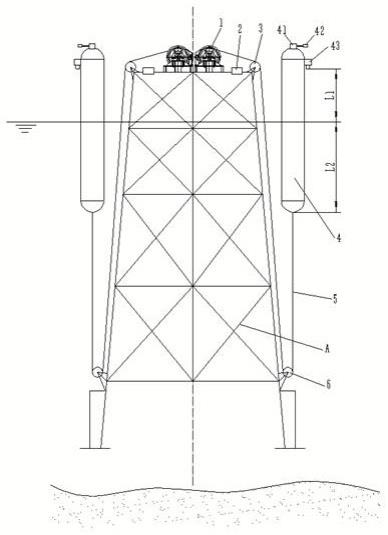
图1 为本实用新型的结构示意图。
[0013]
图2为本实用新型的复式结构示意图。
[0014]
图3为本实用新型的另一种结构示意图。
[0015]
其中:1-牵引机构,2-电子式水平仪,3-上滑轮组,4-气囊,41-电动调节阀,42-快速接口,43-水位传感器, 5-牵引绳,6-下滑轮组, 7-控制器,a-钢结构架。
具体实施方式
[0016]
下面结合附图对本实用新型做进一步详细的描述:
[0017]
如图1、2所示,一种钢结构架下潜定位安装用气囊4浮力装置,安装在钢结构架a上,包括分别设置在钢结构架前后左右四个方向的至少四组定位安装组件,每组定位安装组件均包括牵引机构1、上滑轮组3、下滑轮组6和气囊4,牵引机构1和上滑轮组3设置在钢结构架顶部,下滑轮组6设置在钢结构架下部,气囊4漂浮在钢结构架外侧,牵引机构1上连接有牵引绳5,牵引绳5依次绕在上滑轮组3和下滑轮组6上,并且牵引绳5末端与气囊4的底部相连接,气囊4顶部设置有充放气口,充放气口设置有快速接口42和电动调节阀41。
[0018]
还包括设置在钢结构架顶部的电子式水平仪2和控制器7,电子式水平仪2与控制器7的信号输入端信号连接,控制器7的信号输出端与电动调节阀41信号连接。气囊4顶部设置有水位传感器43,水位传感器43与控制器7的信号输入端信号连接。采用八组定位安装组件,钢结构架前后左右的每个方向上设置两组定位安装组件,八组定位安装组件前后对称、左右对称设置在钢结构架上。控制器7设置在钢结构架顶部中心,上滑轮组3设置在钢结构架顶部边缘,牵引机构1设置在控制器7与上滑轮组3之间。气囊4为上下延伸的长条状的圆柱形囊体。通过对称布置,每个牵引机构1控制一组气囊4,通过中间布置的控制器7实现各牵引机构1、各气囊4的协调工作。
[0019]
根据需要安装的钢结构架的自重、重心、自浮力等物理参数,计算所需要的气囊4产生浮力的大小,从而满足不同下潜状态下气囊4需要提供的浮力和水中深度。工作时,通过牵引机构1来牵引和释放气囊4在水中的深度,也就是调节气囊4产生的浮力来调节钢结构架在水中的深度。
[0020]
牵引机构1释放牵引绳5,则钢结构架下潜,钢结构架产生的自浮力增加,从而气囊4需要的浮力减少,气囊4上浮一部分,根据的水位传感器43反馈给控制器7的电信号,实时调整牵引机构1的释放速度和长度,与电子式水平仪2联合工作,各个牵引机构1控制各自气囊4产生浮力和钢结构架的水平姿态,从而实现逐渐下潜的方式;这种方式实现了钢结构架的下潜定位安装。反之,牵引机构1收紧牵引绳5,钢结构架上浮,自浮力减少,气囊4需要提供更多的浮力,其进一步下潜,如此反复,即可实现钢结构架的上浮。
[0021]
基于对钢结构架浮力控制可行的状态下,气囊4产生足够的浮力能抵抗钢结构架因海浪拍打产生的纵横倾斜等恶劣工况。这种方式实现了钢结构架的自浮上升,比如导管架拆除或打捞等。如图3所示,一个牵引机构1可以挂多个气囊4的,从而组成增加浮力的多
气囊4组合模式,适用于需要更大浮力的状态。
[0022]
以上所述仅是本专利的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本专利技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本专利的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1