一种标贯动探自动记录仪及其控制方法与流程
1.本技术涉及岩土工程勘察的领域,尤其是涉及一种标贯动探自动记录仪及其控制方法。
背景技术:
2.在建筑施工和道路施工等施工时,需要对地面的承载能力进行检测。一般检测人员会对地面进行标准贯入试验,从而检测出地面的承载能力。
3.目前,相关技术公开一种标准贯入仪,包括底板、连接杆和贯入管,底板开设有供连接杆和贯入管穿设的通孔。连接杆的底端与贯入管的顶端可拆卸连接。连接杆的顶端固定安装有锤垫,锤垫远离连接杆的一侧固定安装有导向杆。导向杆升降套设有锤头。锤头远离锤垫的一侧固定安装有吊绳。将底板放置于地面,之后贯入管和连接杆依次穿过通孔后插入地面。通过吊绳向上拉动锤头,之后松开吊绳,锤头受到重力向下掉落捶击锤垫,从而使贯入管向地面深处插入。通过设定贯入管受锤击的推动深入地面的长度,之后锤头多次锤击锤垫,在贯入管深入地面到指定长度后,计算锤击次数。之后检测人员根据锤头下落的高度、锤头重量,贯入管深入地面的长度和锤击次数进行计算,从而检测出地面的承载能力。
4.针对上述中的相关技术,发明人认为计量锤头的锤击次数一般为检测人员人工进行计数。贯入管深入到地面的预定长度后,锤头会敲击多次,每两次锤击还有一定的时间间隔,从而使检测人员出现数错锤击次数的情况出现。
技术实现要素:
5.为了方便检测人员记录锤击次数,本技术提供一种标贯动探自动记录仪及其控制方法。
6.本技术提供的一种标贯动探自动记录仪及其控制方法,采用如下的技术方案:一种标贯动探自动记录仪,包括底板、连接杆、锤头和贯入管,所述锤头连接有吊绳,所述连接杆的顶端固定安装有锤垫,所述连接杆的底端与贯入管的一端固定连接,所述底板开设有供连接杆和贯入管穿设的通孔,所述锤垫远离连接杆的一侧固定安装有导向杆,所述锤头滑动套设于导向杆,所述锤垫的底侧固定安装有第一距离传感器,所述锤垫的顶侧固定嵌设有第一压力传感器,所述底板的顶侧放置有显示器,所述显示器电连接于第一压力传感器和第一距离传感器。
7.通过采用上述技术方案,将底板放置于待检测的地面,之后贯入管和连接杆依次穿过通孔后插入地面。第一距离传感器先检测锤垫到底板的距离并发送至显示器。之后通过吊绳向上拉动锤头移动至指定的高度,然后松开吊绳,锤头受到重力向下掉落捶击锤垫,从而使贯入管向地面深处移动。每次锤头锤击锤垫后,锤头挤压第一压力传感器,从而使第一距离传感器再次检测锤垫到底板的距离并发送至显示器。显示器计算现有的第一距离传感器检测的距离与起始第一距离传感器检测的距离之间的差值,从而得到锤头锤击锤垫后
的贯入管深入地面的长度,之后显示在显示屏上。
8.锤头多次敲击锤垫,显示器可显示每次锤头锤击锤垫后,贯入管深入地面的长度。检测人员通过显示器上最后一次锤击显示的贯入管深入地面的长度大于预设的贯入管贯入地面的长度,试验可停止。之后检测人员直接在显示器上计算锤击次数,从而方便检测人员记录锤击次数。
9.可选的,所述底板的顶侧固定安装有支撑架和卷扬机,所述支撑架固定安装有定滑轮,所述卷扬机安装有伺服电机,所述吊绳绕过定滑轮收卷于卷扬机,所述导向杆螺纹套设有限位板,所述限位板靠近锤垫的一侧安装有第二压力传感器。
10.通过采用上述技术方案,每次第一距离传感器检测锤垫到底板的距离后,第二距离传感器也检测锤垫到底板的距离,之后显示器在第一距离传感器和第二距离传感器检测到的锤垫到底板的距离相等时,连接杆和贯入管竖直插接在地面。若显示器在第一距离传感器和第二距离传感器检测到的锤垫到底板的距离不相等,连接杆和贯入管出现倾斜,从而方便工作人员调整连接杆和贯入管的位置,提高检测的准确性。
11.通过定滑轮对吊绳向上拉动锤头进行导向,之后通过伺服电机驱动卷扬机收卷或放卷,从而降低检测人员的工作强度。
12.一种标贯动探自动记录仪的控制方法,获取贯入信息,所述贯入信息为锤垫需要下降的距离;获取第一距离信息,所述第一距离信息为第一距离传感器检测的锤垫到底板的初始距离;获取第一压力信息,所述第一压力信息为锤头挤压第一压力传感器后产生的信号;获取第二距离信息,所述第二距离信息为第一压力传感器受到挤压后,第一距离传感器检测的距离与第一距离信息之间的差值;存储第二距离信息;判断所述第二距离信息是否大于贯入信息;若是,则提示检测完成;否则,提示需要继续检测。
13.通过采用上述技术方案,检测人员向显示器输入锤垫需要下降的距离,从而使显示器获取贯入信息。之后第一距离传感器检测锤垫到底板的距离发送至显示器,从而使显示器获取第一距离信息。检测人员通过吊绳拉动锤头上升至一定高度后,锤头下降锤击锤垫,贯入管向地面深处移动。之后第一压力传感器受到挤压向显示器发送第一压力信息,第一距离传感器再次检测锤垫到底板的距离发送至显示器,显示器计算第一距离传感器检测的距离与第一距离信息之间的差值,从而使显示器获得第二距离信息。之后显示器显示并存储第二距离信息。锤头锤击锤垫多次后,显示器记录多次第二距离信息。在最后一个第二距离信息大于贯入信息后,显示器提示检测结束。之后检测人员直接在显示器上计算锤击次数,从而方便检测人员记录锤击次数。
14.可选的,在获取第一距离信息后;向伺服电机发送放卷信息,所述放卷信息用于控制伺服电机带动卷扬机放卷的信号;在获取第一压力信息后,根据第一压力信息向伺服电机发送停止信息,所述停止信息为控制伺服电机停止收卷或放卷;在存储第二距离信息后,向伺服电机发送收卷信息,所述收卷信息用于控制伺服电机带动卷扬机收卷的信号;获取第二压力信息,所述第二压力信息为锤头挤压第二压力传感器发出的信号;根据第二压力信息向伺服电机发送停止信息;在提示需要继续检测后,返回向伺服电机发送放卷信息。
15.通过采用上述技术方案,第一距离传感器将锤垫到底板的初始距离发送在显示器
后,显示器向伺服电机发送放卷信息,伺服电机带动卷扬机放卷。在锤头挤压第一传感器后,显示器向伺服电机发送停止信息,伺服电机停止驱动卷扬机进行放卷。在显示器记录第二距离信息后,显示器向伺服电机发送收卷信息,伺服电机带动卷扬机收卷。在锤头挤压第二压力传感器后,第二压力传感器向显示器发送第二压力信息,从而使显示器关闭伺服电机,锤头上升至需要的高度。在每次锤击后,若最后一个第二距离信息小于贯入信息,显示器继续向伺服电机发送放卷信息,从而使本装置继续锤击。通过显示器控制伺服电机,之后伺服电机控制卷扬机,从而使锤头进行升降,进而减少检测人员的工作强度。
16.可选的,在获取贯入信息时,获取锤击信息,所述锤击信息为锤头的重量和锤击高度;根据锤击信息计算撞击信息,所述撞击信息为锤头在无阻力下的自由落体后撞击锤垫的压力;在根据第一压力信息向伺服电机发送停止信息后,根据第一压力信息和撞击信息计算第一误差信息,所述第一误差信息为第一压力信息和撞击信息之间的差值;在存储第二距离信息时,存储第一误差信息。
17.通过采用上述技术方案,检测人员向显示器输入锤击信息,之后显示器计算锤头在无任何阻力的情况下,锤头向下自由落体锤击锤垫的压力。每次锤头锤击锤垫时,锤头会挤压第一压力传感器,第一压力传感器检测锤头锤击锤垫的瞬时压力并发送至显示器。显示器计算第一压力传感器检测的压力与撞击信息之间的差值,从而使显示器获得第一误差信息。之后显示器存储第一误差信息并显示。检测人员可查看每次锤头锤击锤垫后的第一误差信息,从而方便检测人员了解每次锤击的可靠性。
18.可选的,在获取第一距离信息时,获取第一校准信息;所述第一校准信息为第二距离传感器检测的距离;判断所述第一校准信息是否与第一距离信息相等;若是,则向伺服电机发送放卷信息;否则,提示第一倾斜警告,所述第一倾斜警告为检测开始时连接杆倾斜。
19.通过采用上述技术方案,在获取第一距离信息时,第二距离传感器也会检测锤垫到底板之间的距离并发送至显示器。在第一距离信息和第一校准信息相等时,显示器向伺服电机发送放卷信息。锤头开始锤击锤垫。在第一距离信息和第一校准信息不相等时,显示器提醒检测人员连接杆倾斜,从而方便检测人员及时调整连接杆,进而提高检测结果的准确性。
20.可选的,在提示第一倾斜警告后,返回获取第一距离信息和第一校准信息。
21.通过采用上述技术方案,在显示器发出第一倾斜警告后,且检测人员将连接杆调整整齐后,显示器自动返回获取第一距离信息和第一校准信息,从而方便检测人员进行检测。
22.可选的,在获取第二距离信息时,获取第二校准信息,所述第二校准信息为第二距离传感器检测的距离;判断所述第二校准信息是否与第二距离信息相等;若是,则存储第二距离信息和第一误差信息;否则,提示第二倾斜警告,所述第二倾斜警告为检测过程中连接杆倾斜。
23.通过采用上述技术方案,在获取第二距离信息时,第二距离传感器也会检测锤垫到底板之间的距离并发送至显示器。在第二距离信息和第二校准信息相等时,显示器存储第二距离信息和第一误差信息。在第二距离信息和第二校准信息不相等时,显示器提醒检测人员连接杆倾斜,从而方便检测人员及时调整连接杆,进而提高检测结果的准确性。
24.可选的,在提示第二倾斜警告后,根据第二距离信息和第二校准信息计算第二误差信息,所述第二误差信息为第二距离信息和第二校准信息之间的差值;显示第二误差信息;获取请求信息,所述请求信息包括同意信息或拒绝信息;判断所述请求信息是否为同意信息;若是,则存储第二距离信息和第一误差信息;若不是,则检测停止。
25.通过采用上述技术方案,在提示第二倾斜警告后,显示器根据第二距离信息和第二校准信息计算第二误差信息,同时显示器显示第二误差信息。之后检测人员根据第二误差信息的大小可停止检测,或者继续检测,从而提高检测结果的准确性。
26.综上所述,本技术包括以下至少一种有益技术效果:1.在锤头每次锤击锤垫时会挤压第一压力传感器,第一压力传感器受到挤压后向显示器发送第一压力信息,之后显示器会获取第一距离传感器检测到的锤垫到底板的距离,显示器计算当前第一距离传感器检测的距离与初始之间的差值形成第二距离信息,显示器会记录每次锤头锤击锤垫后的第二距离信息,在检测人员发现第二距离信息大于贯入信息后,检测试验可停止,检测人员计算显示器上显示的锤击数,从而检测人员记录锤击次数;2.每次第一距离传感器检测锤垫到底板的距离后,第二距离传感器也会检测锤垫到底板的距离,在第一距离传感器和第二距离传感器检测到的距离相等时,连接杆竖直插接于地面,否则连接杆倾斜需要检测人员调整,通过检测人员及时调整连接杆摆放整齐,从而提高检测结果的准确性。
附图说明
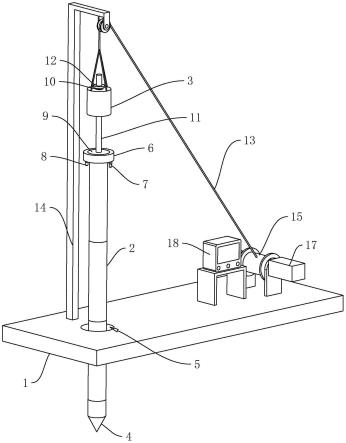
27.图1是本技术实施例的整体结构示意图;图2是本技术实施例的部分结构示意图;图3是本技术实施例的第一部分流程图;图4是本技术实施例的第二部分流程图。
28.附图标记说明:1、底板;2、连接杆;3、锤头;4、贯入管;5、通孔;6、锤垫;7、第一距离传感器;8、第二距离传感器;9、第一压力传感器;10、第二压力传感器;11、导向杆;12、限位板;13、吊绳;14、支撑架;15、卷扬机;16、定滑轮;17、伺服电机;18、显示器。
具体实施方式
29.以下结合附图1-4对本技术作进一步详细说明。
30.本技术实施例公开一种标贯动探自动记录仪及其控制方法。
31.参照图1、图2,一种标贯动探自动记录仪及其控制方法,包括底板1、连接杆2、锤头3和贯入管4,底板1开设有供连接杆2和贯入管4穿设的通孔5,连接杆2的底端与贯入管4的顶端固定连接。连接杆2远离贯入管4的一端固定安装有锤垫6。锤垫6靠近连接杆2的一次固定安装有第一距离传感器7和第二距离传感器8。
32.锤垫6远离连接杆2的一侧嵌设有第一压力传感器9,锤垫6远离连接杆2的一侧固定安装有导向杆11,锤头3升降套设于导向杆11。导向杆11远离锤垫6的一端螺纹套设有限位板12。限位板12靠近锤垫6的一侧安装有第二压力传感器10。限位板12用于限制锤头3沿导向杆11向上滑出,还有保持每次锤头3上升后于锤垫6之间的距离相等。
33.参照图1、图2,锤头3远离锤垫6的一侧固定安装有吊绳13,底板1的顶侧固定安装有支撑架14和卷扬机15。支撑架14固定安装有定滑轮16,吊绳13绕过定滑轮16收卷于卷扬机15。卷扬机15安装有伺服电机17。
34.底板1的顶侧放置有显示器18,第一压力传感器9、第二压力传感器10、第一距离传感器7、第二距离传感器8和伺服电机17均与显示器18电连接。
35.将底板1放置于地面后,让贯入管4和连接杆2依次穿过通孔5后插接于地面。之后启动显示器18,第一距离传感器7和第二距离传感器8均测量锤垫6到底板1的距离。在第一距离传感器7和第二距离传感器8检测的距离相等时,连接杆2竖直插接于地面。在第一距离传感器7和第二距离传感器8检测的距离不相等时,连接杆2倾斜插接于地面。显示器18会发出警告通知检测人员调整连接杆2。
36.在连接杆2竖直插接于地面后,显示器18启动伺服电机17,伺服电机17带动卷扬机15放卷。锤头3经过导向杆11导向后锤击锤垫6和挤压第一压力传感器9。第一压力传感器9向显示器18发送信号,显示器18关闭伺服电机17。之后显示器18再次启动第一距离传感器7和第二距离传感器8测量锤垫6到底板1的距离。在第一距离传感器7和第二距离传感器8检测的距离相等时,显示器18启动伺服电机17,伺服电机17带动卷扬机15收卷。
37.在锤头3挤压第二压力传感器10后,第二压力传感器10向显示器18发送信号,之后显示器18关闭伺服电机17。在锤头3多次锤击锤垫6后,显示器18根据第一距离传感器7和第二距离传感器8之间的差值,显示器记录每次锤头3锤击后锤垫6下降的距离。在最后一次锤头3锤击锤垫6显示的锤垫6下降的距离大于预设的需要贯入管4贯入地面的深度时,检测人员可停止检测。之后检测人员通过显示器18显示的数据记录锤击次数,从而方便检测人员记录锤击次数。
38.参照图3、图4,一种标贯动探自动记录仪的控制方法,为了方便检测人员记录锤击次数,本技术包括以下控制方法:s101:获取贯入信息和锤击信息。检测人员将贯入管4需要贯入地面的深度输入显示器18,从和使显示器18获取贯入信息。检测人员将锤头3的重量,还有锤头3每次锤击锤垫6时,锤头3于锤垫6之间的距离输入显示器18,从而使显示器18获得锤击信息。
39.s102:根据锤击信息计算撞击信息。锤头3在无任何阻力的作用下撞击锤垫6产生的压力为锤击信息。
40.s103:获取第一距离信息和第一校准信息。锤头3还未开始锤击时,第一距离传感器7检测锤垫6到底板1的距离并发送至显示器18,从而使显示器18获得第一距离信息;同时第二距离传感器8检测锤垫6到底板1的距离并发送至显示器18,从而使显示器18获得第一校准信息。
41.s104:判断第一距离信息是否与第一校准信息相等;若是,则执行s105;否则执行s106。
42.s105:向伺服电机17发送放卷信息,执行s107。在第一距离信息与第一校准信息相等时,连接杆2竖直插接在地面,这时显示器18向伺服电机17发送放卷信息。伺服电机17接收到放卷信息后带动卷扬机15进行放卷。卷扬机15放卷,从而使锤头3向下掉落锤击锤垫6。
43.s106:提示第一倾斜警告,返回执行s103。在第一距离信息与第一校准信息不相等时,连接杆2倾斜插接在地面。显示器18显示第一倾斜警告,从而方便检测人员及时发现连
接杆2未竖直插接在地面。之后检测人员可及时调整连接杆2位置,让连接杆2竖直插接于地面,从而提高检测结果的准确性。
44.s107:获取第一压力信息。在锤头3向下掉落锤击锤垫6后,锤头3挤压第一压力传感器9。第一压力传感器9检测锤头3撞击第一压力传感器9的瞬间压力并发送给显示器18。
45.s108:根据第一压力信息向伺服电机17发送停止信息。锤头3挤压第一压力传感器9后,卷扬机15不需要继续放卷。显示器18向伺服电机17发送停止信息,从而关闭伺服电机17。
46.s109:根据第一压力信息和撞击信息计算第一误差信息。第一压力信息为现实锤头3撞击锤垫6的瞬间压力,而撞击信息为锤头3在无任何阻力的情况下撞击锤垫6的压力。显示器18计算第一压力信息和撞击信息之间的差值,从而获得第一误差信息。
47.s110:获取第二距离信息和第二校准信息。在锤头3撞击锤垫6后,显示器18再次获取第一距离传感器7检测的锤垫6到底板1的距离,从而获得第二距离信息;显示器18还再次获取第二距离传感器8检测的锤垫6到底板1的距离,从而获得第二校准信息。
48.s111:判断第二距离信息是否与第二校准信息相等;若是,则执行s112;否则执行s119。
49.s112:存储第二距离信息和误差信息。第二距离信息是否与第二校准信息相等,则连接杆2保持竖直插接在地面,本次锤头3锤击锤垫6的检测结果准确度高,显示器18存储第二距离信息和误差信息。之后显示器18会显示第二距离信息和误差信息供检测人员查看。
50.s113:向伺服电机17发送收卷信息。显示器18向伺服电机17发送收卷信息,伺服电机17接收到收卷信息后,伺服电机17驱动卷扬机15进行收卷,从而使锤头3上升。
51.s114:获取第二压力信息。在锤头3上升挤压第二压力传感器10后,第二压力传感器10向显示器18发送第二压力信息,从而使显示器18获取第二压力信息。
52.s115:根据第二压力信息向伺服电机17发送停止信息。在显示器18接收到第二压力信息后,显示器18向伺服电机17发送停止信息。伺服电机17根据停止信息关闭卷扬机15。从而方便下次锤头3下落的高度于本次下落的高度相等。
53.s116:判断第二距离信息是否大于贯入信息;若是,则执行s117;否则执行s118。
54.s117:提示检测完成。显示器18提示检测完成后进入待机,检测人员通过显示器18可查看每次锤头3锤击锤垫6的第二距离信息和第一误差信息。通过第一误差信息可了解每次锤头3锤击锤垫6的压力与预计的压力的差距,从而可估算本次检测实验结果的可靠性。通过第二距离信息,从而方便检测人员获取贯入管4贯入地面一定距离需要的锤击次数。
55.s118:提示需要继续检测,并返回s105。第二距离信息是小于贯入信息,从而还需要锤头3继续锤击锤垫6。
56.s119:提示第二倾斜警告。在第二距离信息与第二校准信息不相等时,连接杆2倾斜插接在地面。显示器18显示第二倾斜警告,从而方便检测人员及时发现连接杆2未竖直插接在地面。之后检测人员可及时调整连接杆2位置,让连接杆2竖直插接于地面,从而提高检测结果的准确性。
57.s120:根据第二距离信息和第二校准信息计算第二误差信息。显示器18计算第二距离信息和第二校准信息之间的差值,从而获得第二误差信息。
58.s121:显示第二误差信息。显示器18显示第二误差信息共检测人员查看。
59.s122:获取请求信息。请求信息包括同意信息或拒绝信息。请求信息为检测人员向显示器18输入的信息。
60.s123:判断所述请求信息是否为同意信息;若是,则执行s112;否则执行s124。
61.s124:检测停止。
62.检测人员查看第二误差信息,第二误差信息大,检测人员需要重新检测,检测停止。第二误差信息在允许的误差范围内,检测人员可继续进行检测。
63.本技术实施例一种标贯动探自动记录仪及其控制方法的实施原理为:锤头3每次锤击锤垫6,显示器18均会记录锤头3每次锤击锤垫6后,贯入管4深入地面的长度。在检测实验结束后,检测人员通过显示器18显示的每次锤击的第二距离信息,从而获得需要的贯入管4贯入地面预定的深度需要的锤击次数。这样检测人员不需要人工计数,从而方便检测人员记录锤击次数。
64.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1