一种基坑深度检测系统及方法与流程
1.本发明涉及基坑检测技术领域,具体涉及一种基坑深度检测系统及方法。
背景技术:
2.基坑是房屋建筑、能源开采或者地下建筑物在施工时需要开挖的的坑。为了保证基坑施工、主体地下结构的安全与周围环境不受损害,需要进行基坑支护、降水和开挖,并且进行相应的堪查、设计、施工和监测,这项系统的综合性工程称之为基坑工程。
3.基坑工程是面对各种各样的地基土和复杂的环境条件进行施工作业,其存在诸如外力不确定性、变形不确定性、土性不确定性和一些偶然变化所引起的不确定因素。随着国民经济、基础建设和城市规划的发展,土地越显珍贵,各种地下建筑越来越多、越来越深、越来越复杂,因而基坑施工技术在这个发展过程中也得到了极大的推广和普及,但是各种安全问题也经常出现。所以如何保证基坑施工的安全就显得更加重要了。
4.基坑工程是一门实践性很强的实践科学,由于土体性质的复杂多变性和各种计算模型的局限性,很多基坑工程的理论计算结果与实测数据往往有较大差异。根据上述情况,在工程设计阶段就准确无误地预测基坑工程支护结构和周围土体在施工过程中的变化是不现实的,施工过程中如果出现异常,且这种变化又没有被及时发现并任其发展,后果将不堪设想。
5.因此,每个基坑在完成后都需要进行进一步的检测;其中,基坑的深度是很重要的,由于每个基坑所需要的深度不一定相同,所以每个基坑都需要根据实际需要进行深度的限定,但是由于大部分的基坑过深,所以一般的测量方式很难起到作用,并且人工也无法进行检测,现有技术中对基坑的深度检测,但是存在一些缺点,面对开口较大,且坡度较小的基坑,机械式的深度检测仪器边难以发挥作用,每次更换新的基坑进行检测时需要进行运输,并且由于设备较重,运输较为麻烦,也比较耽误时间,影响工作效率。
技术实现要素:
6.本发明的目的在于提供一种基坑深度检测系统,解决以下技术问题:如何提供一种能够针对大型基坑实现快速且精准的深度检测的系统。
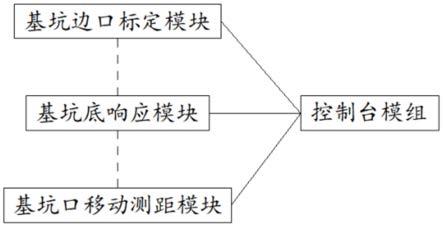
7.本发明的目的可以通过以下技术方案实现:一种基坑深度检测系统,包括:基坑边口标定模块,设置在基坑边口的固定位置,用于发出水平标定信号;基坑底响应模块,设置在基坑底部,用于发出竖直标定信号;基坑口移动测距模块,用于向靠近预设点位的位置运动;当所述基坑口移动测距模块运动至所述预设点位,同时接收到所述竖直标定信号和所述水平标定信号时,通过所述竖直标定信号获取所述基坑口移动测距模块与所述基坑底响应模块的竖直距离;控制台模组,分别与所述基坑边口标定模块、基坑底响应模块和所述基坑口移动
测距模块连接,用于进行数据传输,输出基坑深度值;其中,所述竖直标定信号和所述水平标定信号均为红外脉冲识别信号,且所述竖直标定信号和所述水平标定信号的交点为所述预设点位。
8.通过上述技术方案,可通过在基坑边口设置的基坑边口标定模块和设置在基坑底部的基坑底响应模块所分别发出的水平标定信号和竖直标定信号来确定预设点位,基坑口移动测距模块可采用无人机驱动,如此可以保证基坑口移动测距模块能够较为精准的检测基坑的真实深度,因为有些基坑的开口较大,很难通过成套的机械结构和绳索来对基坑的深度进行检测,所以预设点位可方便工作人员驱动基坑口移动测距模块准确的到达预设点位,从而实现较为精准的基坑深度值的测量。
9.作为本发明进一步的方案:所述基坑边口标定模块包括多个分散设置在基坑口处的水平标定单元,每个所述水平标定单元均发射所述水平标定信号;每个所述水平标定单元对应一个所述预设点位,所述控制台模组记录与所有所述预设点位关联的所述竖直距离,求得的平均值作为所述基坑深度值的第一参考值。
10.通过上述技术方案,分散设置的水平标定单元的水平高度各不相同,这是考虑到基坑底部不一定是平整的,因此可获得不同的竖直距离以模拟基坑的深度变化,从而提升基坑深度测量的真实性。
11.作为本发明进一步的方案:所述基坑口移动测距模块根据所述红外脉冲识别信号识别所述水平标定单元的序列号;当所述基坑口移动测距模块同时接收到所述竖直标定信号和所述水平标定信号时,所述控制台模组驱动所述基坑口移动测距模块向外发出与所述序列号关联的第一音波信号;与所述序列号对应的所述水平标定单元收到所述第一音波信号后进行识别,识别通过后发出第二音波信号;所述基坑底响应模块接收到所述第二音波信号后进行识别,识别通过后发出第三音波信号;所述基坑口移动测距模块接收到所述第三音波信号后进行识别,识别通过后通知所述控制台模组进行数据计算,所述数据计算包括根据测距公式获取对应的所述竖直距离;所述测距公式包括:
12.其中,i为所述水平标定单元的序列号,为序列号为i的所述水平标定单元所对应所述基坑口移动测距模块与所述基坑底响应模块之间的竖直距离,v为音波速度,为所述第三音波信号发出的时间戳,为所述第三音波信号被接收的时间戳。
13.通过上述技术方案,采用音波测距可以无视障碍实现远距离测距,避免因为障碍物导致的无法进行测距的情况发生。
14.作为本发明进一步的方案:所述数据计算还包括验证公式:其中,为序列号为i的所述水平标定单元所对应所述
基坑口移动测距模块与所述基坑底响应模块之间的竖直距离的精准评价值,为所述第一音波信号发出时间戳,为所述第一音波信号被接收的时间戳,为所述第二音波信号的发出时间戳,为所述第二音波信号被接收的时间戳;当p>b时,将与对应序列号i关联的所述竖直距离标记为禁用;当p≤b时,将与对应序列号i关联的所述竖直距离标记为备用;其中,b为0.01;对与不同序列号i关联的所有标记为备用的所述竖直距离求平均值,得到的结果作为所述基坑深度值的第二参考值。
15.通过上述技术方案,可以对计算得到的序列号为i的所述水平标定单元所对应所述基坑口移动测距模块与所述基坑底响应模块之间的竖直距离进行验证,判断精准度是否符合要求,将不符合要求的竖直距离的计算结果进行剔除,保证基坑深度值计算的准确度。
16.作为本发明进一步的方案:所述数据计算还包括综合公式:
17.其中,为所述基坑深度值,α和β均为加权系数,为所述第一参考值,为所述第二参考值。
18.通过上述技术方案,在没有障碍物遮挡测距的情况下,α>β,当有障碍物对测距产生遮挡时,α<β。
19.作为本发明进一步的方案:所述基坑底响应模块包括可移动单元和设置在所述可移动单元上的氢气驱动单元和浮气球;所述氢气驱动单元用于对所述浮气球进行充气和放气,所述可移动单元上设置有用于发出所述竖直标定信号的第一激光单元。
20.通过上述技术方案,在布置基坑底响应模块时,可通过基坑口移动测距模块携带可移动单元进入基坑上空,到达基坑口中心位置后,可将可移动单元释放并同时启动氢气驱动单元向浮气球内充气,使可移动单元能够平稳安全的降落至基坑底部,之后再通过可移动单元调整水平位置,完成部署。
21.作为本发明进一步的方案:在当前的所述基坑深度值的测试过程中,若存在p>b的次数大于预设次数,则在完成当前的所述基坑深度值的输出后,驱动所述可移动单元改变位置,重新进行一次所述基坑深度值的计算,求所述基坑深度值的平均值。
22.作为本发明进一步的方案:一种基坑深度检测方法,包括:将基坑边口标定模块设置在基坑边口的固定位置,驱动所述基坑边口标定模块发出水平标定信号;将基坑底响应模块投放设置在基坑底部,驱动所述基坑底响应模块发出竖直标定信号;驱动基坑口移动测距模块向靠近预设点位的位置运动;当所述基坑口移动测距模块运动至所述预设点位,同时接收到所述竖直标定信号和所述水平标定信号时,通过所述竖直标定信号获取所述基坑口移动测距模块与所述基坑底响应模块的竖直距离;输出基坑深度值;
其中,所述竖直标定信号和所述水平标定信号均为红外脉冲识别信号,且所述竖直标定信号和所述水平标定信号的交点为所述预设点位。
23.本发明的有益效果:本发明可通过在基坑边口设置的基坑边口标定模块和设置在基坑底部的基坑底响应模块所分别发出的水平标定信号和竖直标定信号来确定预设点位,基坑口移动测距模块可采用无人机驱动,如此可以保证基坑口移动测距模块能够较为精准的检测基坑的真实深度,因为有些基坑的开口较大,很难通过成套的机械结构和绳索来对基坑的深度进行检测,所以预设点位可方便工作人员驱动基坑口移动测距模块准确的到达预设点位,从而实现较为精准的基坑深度值的测量;分散设置的水平标定单元的水平高度各不相同,这是考虑到基坑底部不一定是平整的,因此可获得不同的竖直距离以模拟基坑的深度变化,从而提升基坑深度测量的真实性;采用音波测距可以无视障碍实现远距离测距,避免因为障碍物导致的无法进行测距的情况发生;可对测得的序列号为i的所述水平标定单元所对应所述基坑口移动测距模块与所述基坑底响应模块之间的竖直距离进行验证,判断精准度是否符合要求,将不符合要求的竖直距离的计算结果进行剔除,保证基坑深度值计算的准确度。
附图说明
24.下面结合附图对本发明作进一步的说明。
25.图1为本发明中基坑深度检测系统的模块连接示意图。
具体实施方式
[0026][0027]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0028]
请参阅图1所示,本发明为一种基坑深度检测系统,包括:基坑边口标定模块,设置在基坑边口的固定位置,用于发出水平标定信号;基坑底响应模块,设置在基坑底部,用于发出竖直标定信号;基坑口移动测距模块,用于向靠近预设点位的位置运动;当所述基坑口移动测距模块运动至所述预设点位,同时接收到所述竖直标定信号和所述水平标定信号时,通过所述竖直标定信号获取所述基坑口移动测距模块与所述基坑底响应模块的竖直距离;控制台模组,分别与所述基坑边口标定模块、基坑底响应模块和所述基坑口移动测距模块连接,用于进行数据传输,输出基坑深度值;其中,所述竖直标定信号和所述水平标定信号均为红外脉冲识别信号,且所述竖直标定信号和所述水平标定信号的交点为所述预设点位。
[0029]
通过上述技术方案,可通过在基坑边口设置的基坑边口标定模块和设置在基坑底
部的基坑底响应模块所分别发出的水平标定信号和竖直标定信号来确定预设点位,基坑口移动测距模块可采用无人机驱动,如此可以保证基坑口移动测距模块能够较为精准的检测基坑的真实深度,因为有些基坑的开口较大,很难通过成套的机械结构和绳索来对基坑的深度进行检测,所以预设点位可方便工作人员驱动基坑口移动测距模块准确的到达预设点位,从而实现较为精准的基坑深度值的测量。
[0030]
作为本发明进一步的方案:所述基坑边口标定模块包括多个分散设置在基坑口处的水平标定单元,每个所述水平标定单元均发射所述水平标定信号;每个所述水平标定单元对应一个所述预设点位,所述控制台模组记录与所有所述预设点位关联的所述竖直距离,求得的平均值作为所述基坑深度值的第一参考值。
[0031]
通过上述技术方案,分散设置的水平标定单元的水平高度各不相同,这是考虑到基坑底部不一定是平整的,因此可获得不同的竖直距离以模拟基坑的深度变化,从而提升基坑深度测量的真实性。
[0032]
作为本发明进一步的方案:所述基坑口移动测距模块根据所述红外脉冲识别信号识别所述水平标定单元的序列号;当所述基坑口移动测距模块同时接收到所述竖直标定信号和所述水平标定信号时,所述控制台模组驱动所述基坑口移动测距模块向外发出与所述序列号关联的第一音波信号;与所述序列号对应的所述水平标定单元收到所述第一音波信号后进行识别,识别通过后发出第二音波信号;所述基坑底响应模块接收到所述第二音波信号后进行识别,识别通过后发出第三音波信号;所述基坑口移动测距模块接收到所述第三音波信号后进行识别,识别通过后通知所述控制台模组进行数据计算,所述数据计算包括根据测距公式获取对应的所述竖直距离;所述测距公式包括:
[0033]
其中,i为所述水平标定单元的序列号,为序列号为i的所述水平标定单元所对应所述基坑口移动测距模块与所述基坑底响应模块之间的竖直距离,v为音波速度,为所述第三音波信号发出的时间戳,为所述第三音波信号被接收的时间戳。
[0034]
通过上述技术方案,采用音波测距可以无视障碍实现远距离测距,避免因为障碍物导致的无法进行测距的情况发生。
[0035]
作为本发明进一步的方案:所述数据计算还包括验证公式:其中,为序列号为i的所述水平标定单元所对应所述基坑口移动测距模块与所述基坑底响应模块之间的竖直距离的精准评价值,为所述第一音波信号发出时间戳,为所述第一音波信号被接收的时间戳,为所述第二音波信号的发出时间戳,为所述第二音波信号被接收的时间戳;
当p>b时,将与对应序列号i关联的所述竖直距离标记为禁用;当p≤b时,将与对应序列号i关联的所述竖直距离标记为备用;其中,b为1%;当超过1%,说明对应基坑深度检测的可能不准确。
[0036]
对与不同序列号i关联的所有标记为备用的所述竖直距离求平均值,得到的结果作为所述基坑深度值的第二参考值。
[0037]
通过上述技术方案,可以对计算得到的序列号为i的所述水平标定单元所对应所述基坑口移动测距模块与所述基坑底响应模块之间的竖直距离进行验证,判断精准度是否符合要求,将不符合要求的竖直距离的计算结果进行剔除,保证基坑深度值计算的准确度。
[0038]
作为本发明进一步的方案:所述数据计算还包括综合公式:
[0039]
其中,为所述基坑深度值,α和β均为加权系数,为所述第一参考值,为所述第二参考值。
[0040]
通过上述技术方案,在没有障碍物遮挡测距的情况下,α>β,当有障碍物对测距产生遮挡时,α<β。
[0041]
作为本发明进一步的方案:所述基坑底响应模块包括可移动单元和设置在所述可移动单元上的氢气驱动单元和浮气球;所述氢气驱动单元用于对所述浮气球进行充气和放气,所述可移动单元上设置有用于发出所述竖直标定信号的第一激光单元。
[0042]
通过上述技术方案,在布置基坑底响应模块时,可通过基坑口移动测距模块携带可移动单元进入基坑上空,到达基坑口中心位置后,可将可移动单元释放并同时启动氢气驱动单元向浮气球内充气,使可移动单元能够平稳安全的降落至基坑底部,之后再通过可移动单元调整水平位置,完成部署。
[0043]
作为本发明进一步的方案:在当前的所述基坑深度值的测试过程中,若存在p>b的次数大于预设次数,则在完成当前的所述基坑深度值的输出后,驱动所述可移动单元改变位置,重新进行一次所述基坑深度值的计算,求所述基坑深度值的平均值。
[0044]
作为本发明进一步的方案:一种基坑深度检测方法,包括:将基坑边口标定模块设置在基坑边口的固定位置,驱动所述基坑边口标定模块发出水平标定信号;将基坑底响应模块投放设置在基坑底部,驱动所述基坑底响应模块发出竖直标定信号;驱动基坑口移动测距模块向靠近预设点位的位置运动;当所述基坑口移动测距模块运动至所述预设点位,同时接收到所述竖直标定信号和所述水平标定信号时,通过所述竖直标定信号获取所述基坑口移动测距模块与所述基坑底响应模块的竖直距离;输出基坑深度值;其中,所述竖直标定信号和所述水平标定信号均为红外脉冲识别信号,且所述竖直标定信号和所述水平标定信号的交点为所述预设点位。
[0045]
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施
例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1