齿轮啮合控制方法、装置、设备及存储介质与流程
本技术涉及电动工程机械,尤其涉及一种齿轮啮合控制方法、装置、设备及存储介质。
背景技术:
1、在挖掘机领域,电动挖掘机相较于传统机械挖掘机,只是存在动力上的区别。其中,机械挖掘机是通过柴油发动机驱动液压泵,使得液压油推动液压油缸驱动齿轮机构,实现挖掘回转动作;而电动挖掘机是通过电机和电机控制器替代液压马达驱动齿轮机构,实现挖掘机回转动作。
2、与机械挖掘机中根据液压油流量控制转速的液压马达驱动方式不同,电动挖掘机中回转电机的控制使用速度模式。vcu(vehicle control unit,整车控制单元)给定目标转速,电机控制器驱动电机跟随目标转速运行,带动齿轮机构运行。
3、但是,在电机驱动齿轮机构运行过程中,电机控制器未判断齿轮啮合状态,均按照目标转速驱动电机,由于齿轮机构中主动齿轮与从动齿轮啮合之间始终存在齿轮间隙,使得齿轮啮合时刻主动齿轮与从动齿轮啮合之间存在较大的速度差,且主动齿轮的扭矩较大,导致主动齿轮与从动齿轮之间的接触端面受到的应力极大,存在损坏齿轮的风险。
技术实现思路
1、本技术的主要目的在于:提供一种齿轮啮合控制方法、装置、设备及存储介质,旨在解决现有电动挖掘机的齿轮机构在啮合时刻,接触端面受到的应力极大,会导致齿轮损坏的技术问题。
2、为实现上述目的,本技术采用如下技术方案:
3、第一方面,本技术提供一种齿轮啮合控制方法,该方法包括:
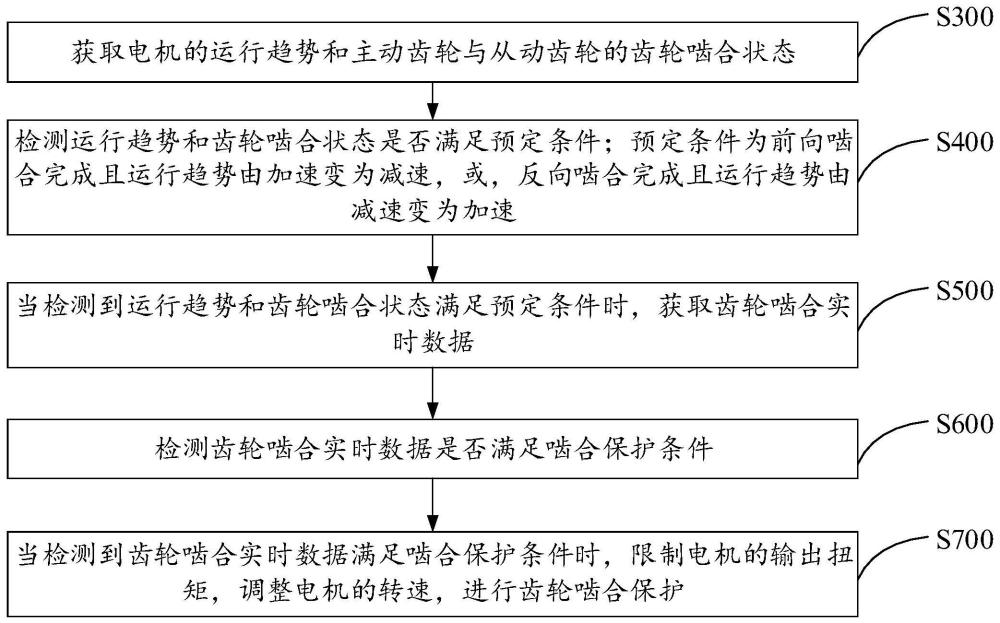
4、获取电机的运行趋势和主动齿轮与从动齿轮的齿轮啮合状态;
5、检测运行趋势和齿轮啮合状态是否满足预定条件;预定条件为前向啮合完成且运行趋势由加速变为减速,或,反向啮合完成且运行趋势由减速变为加速;
6、当检测到运行趋势和齿轮啮合状态满足预定条件时,获取齿轮啮合实时数据;
7、检测齿轮啮合实时数据是否满足啮合保护条件;
8、当检测到齿轮啮合实时数据满足啮合保护条件时,限制电机的输出扭矩,调整电机的转速,进行齿轮啮合保护。
9、可选地,齿轮啮合实时数据包括实时齿轮相对位移,当检测到运行趋势和齿轮啮合状态满足预定条件时,获取齿轮啮合实时数据,包括:
10、当检测到运行趋势和齿轮啮合状态满足预定条件时,开始计时并记为啮合实时耗时,并获取电机的实时转速差值;
11、根据实时转速差值和啮合实时耗时,确定实时齿轮相对位移;
12、其中,实时转速差值为电机的初始转速和实时转速之差;初始转速为运行趋势和齿轮啮合状态满足预定条件时的电机转速,实时转速为啮合实时耗时对应的电机转速。
13、可选地,啮合保护条件为实时齿轮相对位移与齿轮间隙为第一预定大小关系。
14、可选地,齿轮啮合实时数据包括啮合实时耗时,当检测到运行趋势和齿轮啮合状态满足预定条件时,获取齿轮啮合实时数据,包括:
15、当检测到运行趋势和齿轮啮合状态满足预定条件时,开始计时并记为啮合实时耗时。
16、可选地,啮合保护条件为所啮合实时耗时与齿轮啮合耗时为第二预定大小关系。
17、可选地,调整电机的转速,包括:
18、减小电机的转速的变化斜率。
19、可选地,限制电机的输出扭矩,包括:
20、限制电机的输出扭矩不大于电机额定扭矩的预定百分比。
21、可选地,当检测到齿轮啮合实时数据满足啮合保护条件时,限制电机的输出扭矩,调整电机的转速,进行齿轮啮合保护之后,方法还包括:
22、检测齿轮啮合实时数据是否满足齿轮啮合条件;
23、当检测到齿轮啮合实时数据满足齿轮啮合条件时,根据当前电机的运行趋势,获取并更新主动齿轮与从动齿轮的齿轮啮合状态。
24、可选地,当齿轮啮合实时数据包括实时齿轮相对位移时,齿轮啮合条件为实时齿轮相对位移与齿轮间隙为第三预定大小关系。
25、可选地,当齿轮啮合实时数据包括啮合实时耗时时,齿轮啮合条件为啮合实时耗时与齿轮啮合耗时为第四预定大小关系。
26、可选地,获取电机的运行趋势和主动齿轮与从动齿轮的齿轮啮合状态之前,方法还包括:
27、将主动齿轮与从动齿轮的齿轮啮合状态初始化为前向啮合未完成且反向啮合未完成;
28、控制电机加速运行预定时间后,将主动齿轮与从动齿轮的齿轮啮合状态更新为前向啮合完成。
29、可选地,获取电机的运行趋势和主动齿轮与从动齿轮的齿轮啮合状态之前,方法还包括:
30、检测电机是否为首次运行;
31、当检测到电机为首次运行时,获取主动齿轮和从动齿轮的齿轮间隙和齿轮啮合耗时。
32、可选地,当检测到电机为首次运行时,获取主动齿轮和从动齿轮的齿轮间隙和齿轮啮合耗时,包括:
33、当检测到电机为首次运行时,检测电机的运行趋势;
34、当检测到运行趋势由加速变为减速时,实时获取电机的转速,并开始记录电机的运行时长;
35、按预设时间间隔,检测当前时刻电机的转速是否小于前一时刻电机的转速;
36、若检测到当前时刻电机的转速小于前一时刻电机的转速,则根据当前时刻电机的转速和运行趋势由加速变为减速时电机的转速、当前时刻对应的运行时长,确定齿轮间隙和齿轮啮合耗时;
37、若检测到当前时刻电机的转速不小于前一时刻电机的转速,则检测当前时刻电机的转速与下一时刻电机的转速之差是否小于预定值;
38、若检测到当前时刻电机的转速与下一时刻电机的转速之差小于预定值,则根据当前时刻电机的转速和运行趋势变化由加速为减速时电机的转速、当前时刻对应的运行时长,确定齿轮间隙和齿轮啮合耗时;
39、若检测到当前时刻电机的转速与下一时刻电机的转速之差不小于预定值,则重新执行按预设时间间隔,获取检测当前时刻电机的转速是否小于前一时刻电机的转速的步骤。
40、第二方面,本技术还提供一种齿轮啮合控制装置,该装置包括:
41、获取模块,用于获取电机的运行趋势和主动齿轮与从动齿轮的齿轮啮合状态;
42、检测模块,用于检测运行趋势和齿轮啮合状态是否满足预定条件;预定条件为前向啮合完成且运行趋势由加速变为减速,或,反向啮合完成且运行趋势由减速变为加速;
43、获取模块,还用于当检测到运行趋势和齿轮啮合状态满足预定条件时,获取齿轮啮合实时数据;
44、检测模块,还用于检测齿轮啮合实时数据是否满足啮合保护条件;
45、啮合保护模块,用于当检测到齿轮啮合实时数据满足啮合保护条件时,限制电机的输出扭矩,调整电机的转速,进行齿轮啮合保护。
46、第三方面,本技术还提供一种齿轮啮合控制设备,该设备包括:存储器、处理器及存储在存储器上并可在处理器上运行的齿轮啮合控制程序,通过齿轮啮合控制程序配置为实现如上述任一项齿轮啮合控制方法的步骤。
47、第四方面,本技术还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现如上述任一项的齿轮啮合控制方法的步骤。
48、本技术提供一种齿轮啮合控制方法、装置、设备及存储介质,获取电机的运行趋势和主动齿轮与从动齿轮的齿轮啮合状态;检测运行趋势和齿轮啮合状态是否满足预定条件;预定条件为前向啮合完成且运行趋势由加速变为减速,或,反向啮合完成且运行趋势由减速变为加速;当检测到运行趋势和齿轮啮合状态满足预定条件时,获取齿轮啮合实时数据;检测齿轮啮合实时数据是否满足啮合保护条件;当检测到齿轮啮合实时数据满足啮合保护条件时,限制电机的输出扭矩,调整电机的转速,进行齿轮啮合保护。
49、由此,本技术在检测到齿轮啮合状态和电机的运行趋势,满足前向啮合完成且运行趋势由加速变为减速,或,满足反向啮合完成且运行趋势由减速变为加速的条件时,确定主动齿轮和从动齿轮需要重新啮合,并在检测到齿轮啮合实时数据满足齿轮啮合保护条件时,进行齿轮啮合保护。从而本技术根据齿轮啮合实时工况,在齿轮啮合时限制电机的输出扭矩,减小了主动齿轮的扭矩,并调整电机的转速,降低了主动齿轮扭矩和主动齿轮与从动齿轮之间的速度偏差,进而减小了齿轮啮合时接触端面所受的应力,解决了现有电动挖掘机的齿轮机构在啮合时刻,接触端面受到的应力极大,会导致齿轮损坏的技术问题,提高了齿轮啮合控制保护的精确性。
- 还没有人留言评论。精彩留言会获得点赞!