装载机控制方法、装置、装载机及存储介质与流程
本发明涉及自动控制,具体涉及装载机控制方法、装置、装载机及存储介质。
背景技术:
1、随着设备自动化和智能化的发展,对于设备无人作业的要求也越来越高。目前国内工程机械无人化才刚刚开始,实现工程机械的无人化作业比乘用车无人化要困难很多。装载机作为一种工程机械,其无人化作业不仅包括行驶无人化,还包括作业装置无人化。
2、然而,由于作业装置的自动化控制比较复杂,目前市面上的很多产品都不具备自动装载的作业功能,无法实时监测装载机机械关节的角度,对装载机的铲斗和动臂进行自动控制。
技术实现思路
1、有鉴于此,本发明提供了一种装载机控制方法、装置、装载机及存储介质,以解决相关产品无法对装载机的铲斗和动臂进行自动控制的问题。
2、第一方面,本发明提供了一种装载机控制方法,装载机包括动臂、铲斗液压推杆、倾斜斗杆、铲斗连杆、动臂连杆和铲斗,动臂的第一端与铲斗液压推杆的第一端铰接,动臂的第二端与铲斗的第一端铰接,铲斗液压推杆的第二端与倾斜斗杆的第一端铰接,倾斜斗杆的第二端通过铲斗连杆与铲斗的第二端铰接;动臂连杆的一端与动臂的第一端固定连接,动臂连杆的另一端与倾斜斗杆上的预设铰接点铰接,该方法包括:
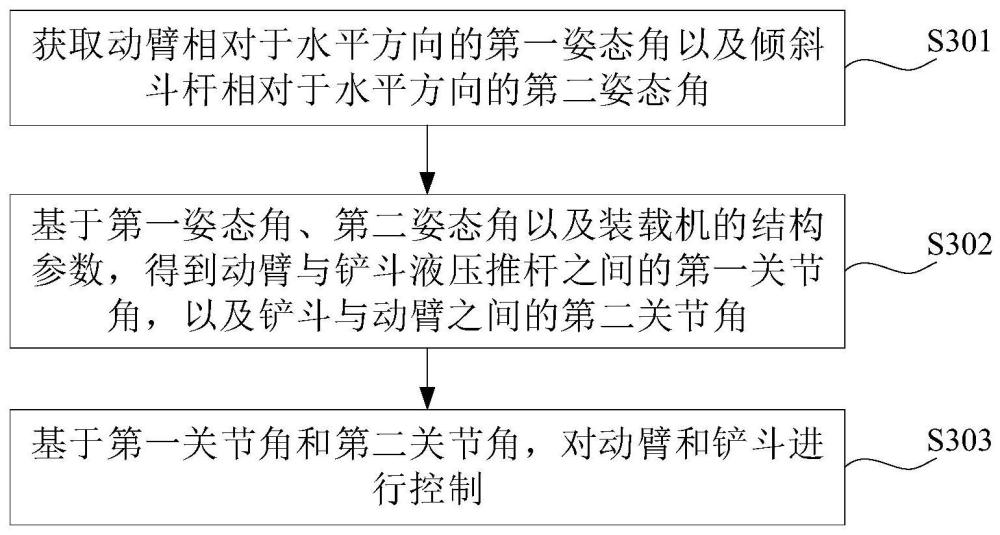
3、获取动臂相对于水平方向的第一姿态角以及倾斜斗杆相对于水平方向的第二姿态角;
4、基于第一姿态角、第二姿态角以及装载机的结构参数,得到动臂与铲斗液压推杆之间的第一关节角,以及铲斗与动臂之间的第二关节角;
5、基于第一关节角和第二关节角,对动臂和铲斗进行控制。
6、从而通过获取动臂相对于水平方向的第一姿态角以及倾斜斗杆相对于水平方向的第二姿态角,接着基于第一姿态角、第二姿态角以及装载机的结构参数,来实时获取装载机作业臂的关节角,从而对装载机动臂和铲斗进行控制。
7、在一种可选的实施方式中,基于第一关节角和第二关节角,对动臂和铲斗进行控制,包括:
8、基于第一关节角与预先获取的第一目标关节角之间的差距,以及第二关节角与预先获取的第二目标关节角之间的差距,对动臂以及铲斗的运动进行规划,确定动臂和铲斗分别对应的目标运动轨迹;
9、基于动臂和铲斗分别对应的目标运动轨迹,得到装载机上的动臂液压推杆对应的第一控制量和铲斗液压推杆对应的第二控制量;
10、基于第一控制量和第二控制量,控制装载机上的动臂和铲斗进行运动。
11、从而通过装载机动臂和铲斗的关节角与目标关节角的差距,来得到动臂和铲斗的目标运动轨迹,从而获得装载机上的动臂液压推杆和铲斗液压推杆分别对应的控制量,以对装载机动臂和铲斗的运动进行控制。
12、在一种可选的实施方式中,基于第一控制量和第二控制量,控制装载机上的动臂和铲斗进行运动,包括:
13、基于第一控制量对装载机上动臂液压缸的状态进行调节,使动臂液压推杆运动,以控制动臂运动使第一关节角达到第一目标关节角;
14、基于第二控制量对装载机上铲斗液压缸的状态进行调节,使铲斗液压推杆运动,以控制铲斗运动使第二关节角达到第二目标关节角。
15、从而通过根据第一控制量和第二控制量来对装载机上动臂液压缸和铲斗液压缸的状态进行调节,控制动臂液压推杆和铲斗液压推杆运动,以使装载机动臂和铲斗的关节角达到目标关节角。
16、在一种可选的实施方式中,装载机的结构参数包括铲斗的底板与后板之间的张开角度;
17、基于第一姿态角、第二姿态角以及装载机的结构参数,得到动臂与铲斗液压推杆之间的第一关节角,以及铲斗与动臂之间的第二关节角,包括:
18、基于第一姿态角,得到第一关节角;
19、基于第一姿态角、第二姿态角以及装载机的结构参数,得到铲斗的后板与动臂之间的第一夹角;
20、根据第一夹角和铲斗的底板与后板之间的张开角度,得到铲斗与动臂之间的第二关节角。
21、从而通过基于第一姿态角、第二姿态角以及装载机的结构参数,得到动臂与铲斗液压推杆之间的第一关节角,以及铲斗与动臂之间的第二关节角,以为后续装载机动臂和铲斗的运动控制提供指导。
22、在一种可选的实施方式中,基于第一姿态角,得到第一关节角,包括:
23、根据预先获取的装载机所在地面的俯仰角和第一姿态角之和,得到第一关节角。
24、由此,不论装载机所在地面是否存在坡度,都可以根据动臂相对于水平方向的姿态角来得到装载机动臂的关节角,保证装载机在不同地面的作业。
25、在一种可选的实施方式中,装载机的结构参数还包括以铲斗的第一端和铲斗的第二端为两侧端点的第一直线段的第一长度、以铲斗的第一端和预设铰接点为两侧端点的第二直线段的第二长度、动臂与第二直线段之间的第二夹角;
26、基于第一姿态角、第二姿态角以及装载机的结构参数,得到铲斗的后板与动臂之间的第一夹角,包括:
27、基于第一姿态角、第二姿态角以及装载机的结构参数,计算以铲斗的第二端和预设铰接点为两侧端点的第三直线段的第三长度;
28、在由铲斗的第一端、铲斗的第二端以及预设铰接点构成的空间三角形中,基于第一直线段、第二直线段和第三直线段之间的余弦关系,根据第一长度、第二长度和第三长度,计算第一直线段与第二直线段之间的第三夹角;
29、计算第二夹角和第三夹角之和,得到第一夹角。
30、从而基于第一姿态角、第二姿态角以及装载机的结构参数,来计算得到铲斗的后板与动臂之间的夹角,以方便后续计算铲斗和动臂之间的关节角。
31、在一种可选的实施方式中,装载机的结构参数还包括以预设铰接点和倾斜斗杆的第二端为两侧端点的第四直线段的第四长度和铲斗连杆对应的铲斗连杆长度;
32、基于第一姿态角、第二姿态角以及装载机的结构参数,计算以铲斗的第二端和预设铰接点为两侧端点的第三直线段的第三长度,包括:
33、计算第二姿态角和第一姿态角之差,得到第四直线段与动臂之间的第四夹角;
34、计算第四夹角和第二夹角之差,得到第二直线段与第四直线段之间的第五夹角;
35、在由铲斗的第一端、倾斜斗杆的第二端以及预设铰接点构成的空间三角形中,根据第二长度、第四长度和第五夹角,计算以铲斗的第一端和倾斜斗杆的第二端为两侧端点的第五直线段的第五长度;
36、在由铲斗的第一端、倾斜斗杆的第二端以及铲斗的第二端构成的空间三角形,以及由铲斗的第一端、倾斜斗杆的第二端以及预设铰接点构成的空间三角形中,根据第一长度、第二长度、第四长度、第五长度和铲斗连杆长度,计算以铲斗的第二端和预设铰接点为两侧端点的第三直线段的第三长度。
37、从而通过基于第一姿态角、第二姿态角以及装载机的结构参数,计算铲斗的第二端和预设铰接点之间的距离,以方便后续计算铲斗和动臂之间的关节角。
38、第二方面,本发明提供了一种装载机控制装置,装载机包括动臂、铲斗液压推杆、倾斜斗杆、铲斗连杆、动臂连杆和铲斗,动臂的第一端与铲斗液压推杆的第一端铰接,动臂的第二端与铲斗的第一端铰接,铲斗液压推杆的第二端与倾斜斗杆的第一端铰接,倾斜斗杆的第二端通过铲斗连杆与铲斗的第二端铰接,铲斗的第一端和铲斗的第二端均位于铲斗的后板上;动臂连杆的一端与动臂的第一端固定连接,动臂连杆的另一端与倾斜斗杆上的预设铰接点铰接,该装置包括:
39、获取模块,用于获取动臂相对于水平方向的第一姿态角以及倾斜斗杆相对于水平方向的第二姿态角;
40、第一处理模块,用于基于第一姿态角、第二姿态角以及装载机的结构参数,得到动臂与铲斗液压推杆之间的第一关节角,以及铲斗与动臂之间的第二关节角;
41、第二处理模块,用于基于第一关节角和第二关节角,对动臂和铲斗进行控制。
42、第三方面,本发明提供了一种装载机,该装载机包括动臂、铲斗液压推杆、倾斜斗杆、铲斗连杆、动臂连杆、铲斗和控制器,动臂的第一端与铲斗液压推杆的第一端铰接,动臂的第二端与铲斗的第一端铰接,铲斗液压推杆的第二端与倾斜斗杆的第一端铰接,倾斜斗杆的第二端通过铲斗连杆与铲斗的第二端铰接,铲斗的第一端和铲斗的第二端均位于铲斗的后板上;动臂连杆的一端与动臂的第一端固定连接,动臂连杆的另一端与倾斜斗杆上的预设铰接点铰接;
43、控制器包括存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的装载机控制方法。
44、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的装载机控制方法。
- 还没有人留言评论。精彩留言会获得点赞!