一种电驱动装载机定速巡航控制方法及系统与流程
本发明涉及一种电驱动装载机定速巡航控制方法及系统,属于电动装载机控制。
背景技术:
1、现有技术中的手柄操控电驱动装载机无定速巡航工作模式,对于电驱动装载机的行驶速度控制全凭驾驶员的主观踩加速踏板、制动踏板,控制电机的输出转矩,并且对于铰点位于车身中间的作业机械而言,其在实际工况中进行大角度转向或出弯时作业,速度会产生突然变化,这是由于前后车身的角度偏转越大,行驶阻力越高。采用此人工方法控制的方式,无法使电驱动装载机的速度稳定在某一恒定速度,影响装载机的连续铲装。同时驾驶员要频繁的踩油门来控制发动机的转速,长时间作业对驾驶人员来说劳动强度很大。
2、现有技术中存在多种电动车巡航控制方法,也存在燃油装载机的定速巡航控制方法,但是,由于电动装载机存在自重大,行驶慢但是加速快,输出扭矩强的特点,现有技术中的电动车车辆定速巡航方法并不适用于电动装载机,容易因为电动装载机的自重和速度导致装载机侧翻,发生事故。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种电驱动装载机定速巡航控制方法及系统,在定速巡航状态下,通过当前速度匹配车身偏转角安全值,实时采集车身偏转角,如果车身偏转角超过车身偏转角安全值,则退出定速巡航模式,控制车辆速度,防止电动装载机发生侧翻,保障行驶安全,提高电动装载机安全性。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供了一种电驱动装载机定速巡航控制方法,包括以下步骤:
4、接收定速巡航指令,进入定速巡航模式;
5、获取车辆此时的实际车速;
6、根据车辆此时的实际车速匹配得到车身偏转角安全值;
7、实时获取车辆的车身偏转角;
8、若车辆的车身偏转角大于车身偏转角安全值,则退出定速巡航模式。
9、进一步的,接收定速巡航指令,进入定速巡航模式,包括:
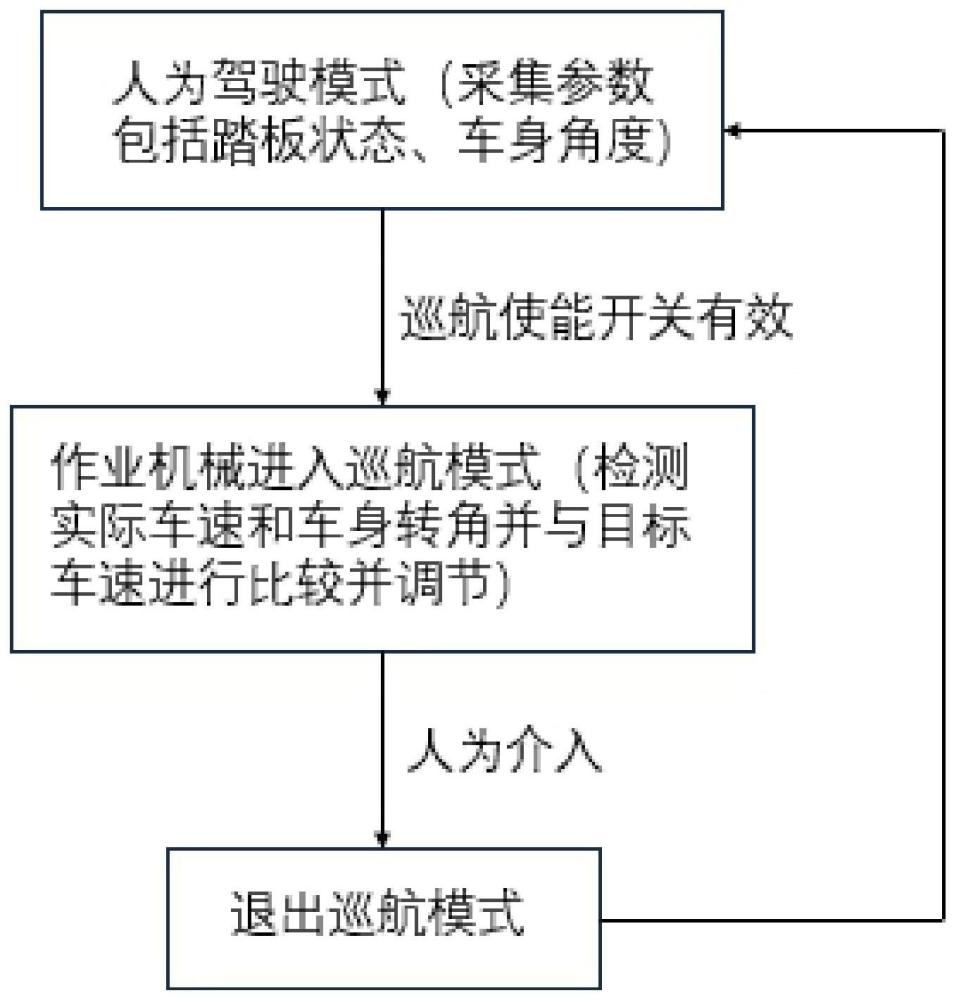
10、获取巡航使能开关状态,若巡航使能开关状为有效则选择进入定速巡航模式,此时车辆的定速巡航速度为车辆当前的实际车速。
11、进一步的,根据车辆此时的实际车速匹配得到车身偏转角安全值,包括:
12、当车辆此时的实际车速为0-5km/h时,车身偏转角安全值为180度;
13、当车辆此时的实际车速为5-10km/h时,车身偏转角安全值为90度;
14、当车辆此时的实际车速为10-20km/h时,车身偏转角安全值为60度;
15、当车辆此时的实际车速为20-30km/h时,车身偏转角安全值为45度;
16、当车辆此时的实际车速为大于等于30km/h时,车身偏转角安全值为30度。
17、进一步的,所述方法还包括:
18、获取巡航模式加减速按钮的巡航目标车速调节信号;
19、根据巡航模式加减速按钮的巡航目标车速调节信号确定巡航目标车速;
20、根据巡航目标车速和车身偏转角调节车辆实际车速。
21、进一步的,根据巡航目标车速和车身偏转角调节车辆实际车速,包括:
22、实时获取车辆此时的实际车速;
23、如果巡航目标车速等于车辆此时的实际车速,则无需调节,保持此时的电机输出转矩;
24、如果车辆此时的实际车速小于巡航目标车速,则根据巡航目标车速匹配得到车身偏转角安全值;如果车辆的车身偏转角大于该车身偏转角安全值,则退出定速巡航模式,否则通过pid控制器计算出的期望踏板开度增大,对输出的增大踏板开度进行转换,得到提高输出转矩的信号。经过变流器控制提高电机输出转矩。
25、如果车辆此时的实际车速大于巡航目标车速,则根据车辆此时的实际车速匹配得到车身偏转角安全值;如果车辆的车身偏转角大于该车身偏转角安全值,则退出定速巡航模式,否则通过pid控制器计算出的期望踏板开度减小,对输出的减小踏板开度进行转换,得到降低输出转矩的信号。经过变流器控制电机输出负转矩。
26、进一步的,所述方法还包括:
27、当装载机处于定速巡航模式下,实时获取此时的车身偏转角;
28、根据此时的车身偏转角确定此时车辆的最高车速;
29、比较此时的巡航目标速度和此时车辆的最高车速,若此时的巡航目标速度大于此时车辆的最高车速,则将巡航目标速度更新为此时车辆的最高车速,否则不变更巡航目标速度。
30、进一步的,车身偏转角和最高车速的对应关系为:
31、当车辆此时的车身偏转角为0-30度时,最高车速为40km/h;
32、当车辆此时的车身偏转角为30-45度时,最高车速为30km/h;
33、当车辆此时的车身偏转角为45-60度时,最高车速为20km/h;
34、当车辆此时的车身偏转角为60-90度时,最高车速为10km/h;
35、当车辆此时的车身偏转角为90-180度时,最高车速为5km/h。
36、进一步的,所述方法还包括:
37、当装载机处于定速巡航模式下,实时车身偏转角由小增大,且不超过车身偏转角安全值时,对输出的踏板开度信号做出调整,控制电机提供正输出转矩,保证入弯速度;
38、当装载机处于定速巡航模式下,实时车身偏转角由大减小,且不超过车身偏转角安全值时,对输出的踏板开度信号做出调整,控制电机提供负输出转矩,保证出弯安全。
39、进一步的,所述方法还包括:
40、当获取到加速踏板状态信号或者制动踏板状态信号时,退出定速巡航模式。
41、第二方面,本发明提供一种电驱动装载机定速巡航控制系统,包括:
42、车轮速度传感器,用于采集车辆此时的实际车速;
43、车身角度传感器,设置在前后车架之间,用于采集车身偏转角;
44、巡航使能开关,用于输出定速巡航指令;
45、vcu控制器,分别与车轮速度传感器、角度传感器和巡航使能开关连接,用于执行如第一方面所述的控制方法。
46、与现有技术相比,本发明所达到的有益效果:
47、1、本发明针对电动装载机自重大,行驶慢但是加速快,输出扭矩强的特点,在定速巡航状态下,通过当前速度匹配车身偏转角安全值,实时采集车身偏转角,如果车身偏转角超过车身偏转角安全值,则退出定速巡航模式,控制车辆速度,防止电动装载机发生侧翻,保障行驶安全,提高电动装载机安全性。
48、2、本发明在调整定速巡航速度时,要求车身偏转角均满足车辆此时的实际车速和目标巡航车速的要求,进一步保证了驾驶的安全性,有效提高电动装载机安全性。
49、3、本发明通过采集实时的车身偏转角确定最高车速,从而对定速巡航的巡航目标速度进行调整,进一步保证了驾驶的安全性,有效提高电动装载机安全性。
50、4、本发明在定速巡航模式下的入弯和出弯的过程中,调整电机输出扭矩,从而避免入弯和出弯的速度波动,同时提高安全性。
51、5、本发明可以实现电驱动装载机在巡航模式下实际车速的自我调节,与人为干涉相比较,vcu系统通过获取实际车速并与目标车速进行比较,提供了在不同路段内车辆能够以一恒定速度平稳行驶的条件且不需要驾驶员有额外操作的驾驶模式。
52、6、本发明有效避免驾驶员在行车过程中频繁踩踏加速踏板和制动踏板可能带来的疲劳及失误,降低了驾驶人员的劳动强度。该方法具有车速调节快速精确的优点,具有更强的适应性、准确性和安全性,避免驾驶员不当操作,保证驾驶及作业安全。
- 还没有人留言评论。精彩留言会获得点赞!