一种智能化清淤机器人及其操作方法和系统与流程
本发明涉及清淤设备,具体为一种智能化清淤机器人及其操作方法和系统。
背景技术:
1、随着城市建设进一步加快,城市扩容相应的增加了地下排水系统的建设。然而建设的同时,由于突发极端降雨导致的城市内涝却凸显排水系统的维护工作的重要。
2、排水系统包括排水管网、渠箱、泵站、箱涵等。排水系统的维护中箱涵清淤是重要部分,即是将箱涵内的淤泥进行清洗,居民在排水管道中排入的大量杂物和基建工地的水泥砂,在箱涵内大量杂物和水泥砂发生沉淀和淤积,大量的淤泥不及时清理,淤泥聚积产生的大量有毒有害,易燃易爆气体,散发出臭味,随意施工可能造成中毒、爆炸等事故,造成人员伤亡,污水池存在积水,潮湿环境下照明设备等临时用电设施在高电压下可能发生漏电,导致触电事故的发生,因此,清理箱涵内的淤泥,对于保护城市环境、避免污染、维护市容市貌、提高人民生活质量,有着极其重要的意义。
3、现有技术中,使用清淤机器人清理箱涵内的淤泥,清淤机器人内设的吸污泵底部与履带底盘底部齐平,位于清淤机器人底盘平面以下的淤泥则无法清理,会造成清淤不彻底,并且清淤机器人的前端采用铲式将淤泥铲起,但淤泥容易堆积在铲式的表面,导致清淤机器人的清理淤泥效率下降。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种智能化清淤机器人及其操作方法和系统,集自动化清理淤泥和控制清淤机器人系统一体,一方面提高了清淤的效率,另一方面能提高智能化清淤机器人安全保障性。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:
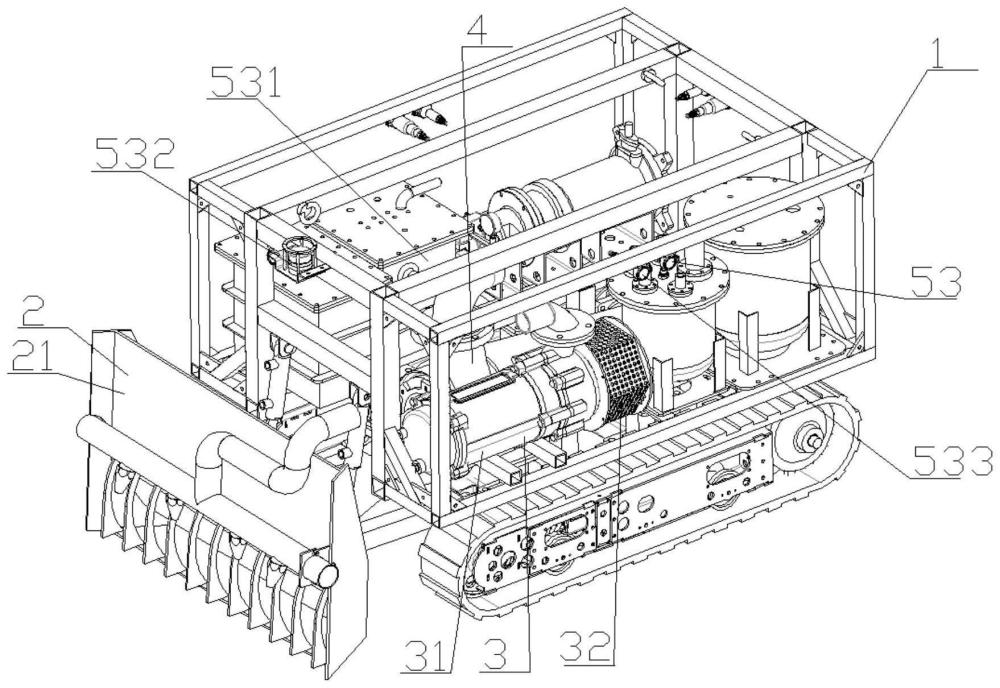
5、第一方面,本申请提供一种智能化清淤机器人,包括框架和履带,所述履带安装在框架底端,所述框架上包括:
6、清理组件,所述清理组件安装在框架的一侧,用于清洗淤泥;
7、冲洗组件,所述冲洗机构包括:
8、水枪泵,所述水枪泵通过底架安装在框架内;
9、水枪,所述水枪的进水端通过管道与水枪泵连接,所述水枪的出水端安装在清理组件上;
10、升降件,安装在清理组件,所述升降件用于控制水枪的升降。
11、作为本申请优选的技术方案,所述水枪泵的出水端安装有滤网筒,用于过滤水枪泵内的沙砾。
12、作为本申请优选的技术方案,所述清洗组件包括:
13、前铲,所述前铲设置在框架的外侧,所述前铲的内端面连接有若干个栏污栅;
14、前铲臂,所述前铲臂的一端与前铲连接,所述前铲臂的另一端连接在框架上,用于辅助前铲移动;
15、驱动件,所述驱动件连接在框架上,且驱动端与前铲连接,用于控制前铲转向与升降。
16、作为本申请优选的技术方案,所述前铲侧壁上连接有固定板,用于固定所述水枪,所述水枪与所述栏污栅均处于同一根y轴方向上。
17、作为本申请优选的技术方案,还包括渣浆泵,所述渣浆泵通过底架安装在框架内,所述渣浆泵的进料端可伸缩地固定在水枪,用于吸取前铲的淤泥。
18、第二方面,本申请提供一种智能化清淤机器人的系统,用于智能化清淤机器人,所述控制系统包括:
19、操作台,所述操作台控制智能化清淤机器人的行驶方向;
20、卷缆机,所述卷缆机控制智能化清淤机器人的启动;
21、监测组件,所述监测组件监控箱涵环境;
22、其中,所述卷缆机与监测组件均与智能化清淤机器人电连接。
23、作为本申请优选的技术方案,所述操作台包括:
24、嵌入式键盘;
25、双屏显示器,所述双屏显示器用于显示智能化清淤机器人的施工环境,
26、气弹簧,所述气弹簧的一端有双屏显示器,另一端与操作台连接;
27、操作面板,所述操作面板控制卷缆机的收线与放线。
28、作为本申请优选的技术方案,所述卷缆机包括:
29、卷缆架;
30、电箱,所述电箱安装在卷缆架的一侧;
31、卷缆筒,所述卷缆筒安装在卷缆架的另一侧,所述卷缆筒的转动端连接有大齿轮;
32、减速比电机,所述减速比电机的转动端连接有小齿轮,所述小齿轮与所述大齿轮之间通过皮带传动;
33、其中,所述电箱与卷缆筒之间还设置有导电滑环。
34、作为本申请优选的技术方案,所述监测组件包括:
35、液压箱,所述液压箱上表面安装有液压传感器;
36、碰壁声呐,所述碰壁声呐安装在框架上;
37、摄像头,所述摄像头安装在框架上;
38、测距声呐,所述测距声呐安装在框架内;
39、三维姿态传感器,所述三维姿态传感器安装在框架内。
40、第三方面,本申请一种智能化清淤机器人的操作方法,应用于智能化清淤机器人和清淤机器人的系统,包括以下步骤:
41、步骤一、控制操作面板,履带运转,带动清淤机器人行走;
42、步骤二、驱动件控制前铲进行上升或下降,当前铲处于上升状态时,开启水枪泵,水经过滤筒和水枪泵从水枪处喷出,清洗前铲,当前铲处于下降状态时,且前铲与地面贴合,前铲进行清理淤泥;
43、步骤三、开启渣浆泵,渣浆泵的进料端抽取前铲处散落的淤泥,渣浆泵的出料端往一级沉淀池输送,再由一级沉淀池流向二级沉淀池,二次沉淀后清水留回泵站;
44、步骤四、当碰壁声呐检测到智能化清淤机器人与墙壁即将相碰时,减速比电机的转速方向调整,同时控制操作面板,履带停止运转。
45、(三)有益效果
46、与现有技术相比,本发明提供了一种智能化清淤机器人及其操作方法和系统,具备以下有益效果:
47、(1)本发明通过设置冲洗组件,清淤机器人在清理淤泥后,冲洗组件便于对清理组件进行冲洗,其中,水枪对前铲上的淤泥进行冲洗,便于清淤机器人的下一次清淤泥工序,避免淤泥堆积在前铲,造成淤泥清理效率下降情况,并且通过设置升降件,能控制水枪的升降,在清理淤泥时,水枪经升降件达到上升的效果,避免淤泥堆积在前铲时,对水枪的出水端造成堵塞。
48、(2)本发明通过设置渣浆泵,淤泥被清理后,仍有部分淤泥残留在前铲处,渣浆泵能及时对松散的淤泥进行吸取,一是避免淤泥堆积在地面,二是便于淤泥的回收,进行沉降处理。
49、(3)本发明通过设置控制系统,控制系统中的监测组件便于工作人员实时观察清淤机器人与附近的淤泥环境,并且能及时使清淤机器人避险,操作台控制清淤机器人行驶,卷缆机便于控制清淤机器人的电源线,当清淤机器人遇险时,卷缆机能及时停止电源输送至清淤机器人。
50、(4)本发明通过智能化清淤机器人的操作方法,使清淤机器人的清理淤泥、清淤机器人的回收淤泥和清淤机器人的预防危险一体化,加快了清理淤泥的效率。
技术特征:
1.一种智能化清淤机器人,包括框架和履带,所述履带安装在框架底端,其特征在于:所述框架上包括:
2.根据权利要求1所述的一种智能化清淤机器人,其特征在于:所述水枪泵的出水端安装有滤网筒,用于过滤水枪泵内的沙砾。
3.根据权利要求1所述的一种智能化清淤机器人,其特征在于:所述清洗组件包括:
4.根据权利要求3所述的一种智能化清淤机器人,其特征在于:所述前铲侧壁上连接有固定板,用于固定所述水枪,所述水枪与所述栏污栅均处于同一根y轴方向上。
5.根据权利要求1所述的一种智能化清淤机器人,其特征在于:还包括渣浆泵,所述渣浆泵通过底架安装在框架内,所述渣浆泵的进料端可伸缩地固定在水枪,用于吸取前铲的淤泥。
6.一种智能化清淤机器人的系统,其特征在于:包括控制系统和如权利要求1~5任一项所述的智能化清淤机器人,所述控制系统包括:
7.根据权利要求6所述的一种智能化清淤机器人的系统,其特征在于:所述操作台包括:
8.根据权利要求7所述的一种智能化清淤机器人的系统,其特征在于:所述卷缆机包括:
9.根据权利要求8所述的一种智能化清淤机器人的系统,其特征在于:所述监测组件包括:
10.一种智能化清淤机器人的操作方法,应用于智能化清淤机器人和清淤机器人的系统,其特征在于:包括以下步骤:
技术总结
本发明涉及清淤设备技术领域,公开了一种智能化清淤机器人及其操作方法和系统,其中,一种智能化清淤机器人,包括框架和履带,所述履带安装在框架底端,所述框架上包括清理组件和冲洗组件,所述清理组件安装在框架的一侧,用于清洗淤泥,所述冲洗机构包括水枪泵和水枪,所述水枪泵通过底架安装在框架内,所述水枪的进水端通过管道与水枪泵连接,所述水枪的出水端安装在清理组件上,水枪的侧壁上设置有若干个喷嘴,水源经水枪泵流经水枪,从喷嘴上喷出,对清理组件进行冲洗,避免清理组件在清理淤泥时,淤泥堆积在清理组件内。
技术研发人员:杨光,李绍帅
受保护的技术使用者:广州市江达潜水疏浚工程有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!