一种堤防道路限宽墩、组件及限宽组件的控制方法与流程
1.本发明涉及堤防工程管理,具体是涉及一种堤防道路限宽墩、组件及限宽组件的控制方法。
背景技术:
2.堤防是防御洪水、保障人民群众生命财产安全的重要防线。为了确保堤防运行安全,河道管理部门常采用在堤防进出口位置设置固定式重型混凝土限宽墩,以禁止未经允许的大型超宽车辆违规上堤行驶。该种型式的限宽墩横截面较大,形状一般为圆柱状,底部预留插筋深入地下。每组限宽墩之间净宽满足小型轿车通行的同时,也能够有效地防止大型超宽社会车辆冲击。但即便如此,该型式的限宽墩已难以满足现有的管理要求:
3.1、不利于维修养护及防汛抢险专用机械设备通行。堤防工程需要及时维修养护,固定式重型混凝土限宽墩在限制大型社会车辆上堤通行的同时,也限制了堤防养护机械设备的通行。当汛期河道出现险情时,上述限宽墩不利于防汛抢险专用机械设备的通行。因此,不得不在需要的时候,反复对其进行移位及复位,投入了大量的人力、物力和财力。
4.2、智慧化程度不高。每组固定式重型混凝土限宽墩一经设置,其净宽即不可调节,难以实现仅允许小型轿车(宽度一般小于2m)可通行、维修养护及防汛抢险专有机械设备(宽度一般2~2.5m)可通行、其他经允许的大型超宽机械设备(宽度一般2.5~3m)可通行等多种应用场景的自动控制,智慧化程度低。现有技术中,有申请号为“2014200827471”的中国专利,公开了一种长方形的限宽路墩,通过人工转动改变路墩的长宽方向,以改变路宽,人工调整费力费时,河道出现险情时需要争分夺秒,且长方形路墩存在尖角,容易对车辆产生剐蹭,车辆撞到尖角会产生较大危害。
技术实现要素:
5.发明目的:针对以上缺点,本发明提供一种方便调节道路宽度的堤防道路限宽墩。
6.本发明还提供一种堤防道路限宽组件及限宽组件的控制方法。
7.技术方案:为解决上述问题,本发明采用一种堤防道路限宽墩,包括基础底座和设置于基础底座上方的墩体,所述基础底座和墩体之间设置转动装置,转动装置用于控制墩体相对基础底座绕竖直方向转动,所述墩体横截面为椭圆形,墩体转轴位于椭圆中心,所述转动装置通过控制墩体的旋转角度改变堤防道路的通过宽度。
8.进一步的,所述转动装置包括转动电机、传动轴,所述转动电机与基础底座固定连接,转动电机输出端通过传动轴与墩体固定连接。
9.进一步的,所述墩体内部设置容纳槽,所述容纳槽内设置中心轴,中心轴下端与基础底座固定连接,中心轴上端固定设置转动电机,所述传动轴一端与容纳槽上顶面固定连接,所述容纳槽侧壁与中心轴侧壁之间设置轴承。
10.进一步的,该堤防道路限宽墩还包括限位装置,所述限位装置包括固定设置于墩体上竖直延伸的伸缩杆以及设置于基础底座上上的限位槽,所述伸缩杆下端落入限位槽内
时,伸缩杆限制墩体相对基础底座旋转。
11.进一步的,所述墩体侧面设置检修窗口,通过检修窗口对转动电机进行检修。
12.进一步的,该堤防道路限宽墩还包括控制模块,所述控制模块用于控制转动电机的旋转,所述墩体内设置摄像头,控制模块用于控制摄像头摄取通过车辆的图像。
13.一种堤防道路限宽组件,包括两个所述的堤防道路限宽墩,两个堤防道路限宽墩面对面设置于道路两侧。
14.进一步的,还包括设置于车辆上的识别码,摄像头用于摄取识别码图像,控制模块用于对设置识别码的车辆图像进行车宽识别,并根据识别的车宽控制墩体转动角度。
15.一种堤防道路限宽组件的控制方法,包括以下步骤:
16.(1)摄取通过的车辆图像;
17.(2)判断车辆图像中是否存在识别码图像:
18.若不存在识别码图像,则不进行动作;
19.若存在识别码图像,则收起限位装置进行下一步骤;
20.(3)获取识别码中的车辆信息;
21.(4)根据车辆信息控制两个堤防道路限宽墩的墩体旋转,旋转结束限位装置进行限位。
22.具体包括以下步骤:
23.(41)获取车辆信息中的车宽l;
24.(42)根据获得的车宽,计算得到控制墩体旋转的转角θ,θ∈[0
°
,90
°
],计算公式如下:
[0025][0026]
其中,a为椭圆形墩体的长轴长度,b为椭圆形墩体的短轴长度,c为单侧安全加宽值;
[0027]
(43)判断限位装置中的伸缩杆是否完全位于限位槽内,若伸缩杆没有完全位于限位槽内,增加转角,使伸缩杆完全位于限位槽内,墩体旋转结束,伸缩杆落入限位槽。
[0028]
有益效果:本发明相对于现有技术,其显著优点是通过转动装置改变椭圆形墩体角度,从而改变道路宽度,实现日常仅允许小型轿车通过,当汛期河道出现险情或者需要养护时,改变宽度允许堤防养护的大型机械设备通过,椭圆形墩体没有尖角的安全隐患。通过控制模块自动控制转动装置旋转,方便快捷。通过识别码自动识别放行车辆,减少人力监控。根据识别码包含的车宽对应旋转允许通过的宽度,防止未经允许宽度的车辆使用识别码通过。设置限位装置机械限制墩体的旋转,实现安全冗余考虑,防止转动电机失效等使墩体进行非目标性旋转。
附图说明
[0029]
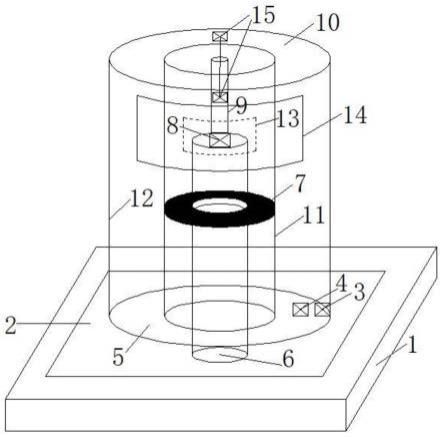
图1是堤防道路限宽墩的结构示意图;
[0030]
图2是堤防道路限宽墩沿横截面长轴方向的剖面示意图;
[0031]
图3是堤防道路限宽墩沿横截面短轴方向剖面示意图;
[0032]
图4是堤防道路限宽墩中限位槽设置示意图;
[0033]
图5是堤防道路限宽墩中伸缩杆的安装示意图;
[0034]
图6是堤防道路限宽组件的工作流程图;
[0035]
图7(a)是堤防道路限宽组件待机状态示意图,图7(b)是堤防道路限宽组件工作状态示意图。
具体实施方式
[0036]
实施例1
[0037]
如图1至图5所示,本实施例中一种堤防道路限宽墩,包括基础底座1和设置于基础底座上方的墩体,基础底座1为混凝土基础,混凝土基础内设置钢板预埋件2,混凝土基础上表面与堤防道路表面持平,墩体包括外侧钢板12、内侧钢板11以及椭圆形的钢盖板10和钢底板5,内侧钢板11围绕形成容纳槽,内侧钢板11与钢底板5、钢盖板10通过焊接连接,内侧钢板11上设置内检修窗口13,外侧钢板12上设置外检修窗口,通过检修窗口对转动电机进行检修,钢底板5、钢盖板10与外侧钢板壁12通过焊接连接。
[0038]
基础底座1和墩体之间设置转动装置,转动装置用于控制墩体相对基础底座 1绕竖直方向转动,墩体横截面为椭圆形,墩体转轴位于椭圆中心,转动装置通过控制墩体的旋转角度改变堤防道路的通过宽度。
[0039]
转动装置包括转动电机8、传动轴9、中心轴6,中心轴6底端通过焊接方式与钢板预埋件2连接,中心轴6位于内侧钢板11围绕形成的容纳槽内,中心轴6上端固定设置转动电机8,转动电机8输出端通过传动轴9与钢盖板10固定连接。内侧钢板11侧壁与中心轴6侧壁之间设置轴承7。
[0040]
墩体上设置限位装置3,限位装置3包括固定设置于外侧钢板12内侧的伸缩杆17,伸缩杆17竖直延伸,且通过伸缩电机18控制伸缩杆的上升和下落,限位装置还包括设置于基础底座1上的若干限位槽16,限位槽16均匀分布于基础底座1,墩体旋转后伸缩杆下端落入对应的限位槽16内时,伸缩杆限制墩体相对基础底座旋转。
[0041]
钢底板5上设置控制模块4,外侧钢板12上设置智能摄像头15,控制模块 4控制转动电机的旋转,并控制摄像头摄取通过车辆的图像。控制模块4根据摄像头摄取的车辆图像识别车宽。
[0042]
实施例2
[0043]
本实施例中一种堤防道路限宽组件,包括两个实施例1中的堤防道路限宽墩,还包括设置于堤防养护机械设备上的识别码,识别码为水利部门提供的动态码。两个堤防道路限宽墩面对面设置于道路两侧,当椭圆形长轴垂直于堤防道路中心线时,两个限宽装置之间的距离为2m(净宽2m模式);当椭圆形短轴垂直于堤防道路中心线时,两个限宽装置之间的距离为3m(净宽3m模式)。摄像头摄取识别码和车辆图像,控制模块获取识别码信息,并识别车宽。
[0044]
实施例3
[0045]
如图6所示,本实施中一种堤防道路限宽组件的控制方法,具体包括以下内容:
[0046]
当堤防道路没有车辆通过时,堤防道路限宽组件处于净宽2m模式待机状态;当有车辆临近时,包括以下步骤:
[0047]
(1)智能摄像头15摄取车辆图像,
[0048]
(2)判断车辆图像中是否存在识别码图像:
[0049]
若不存在识别码图像,则不进行动作;继续保持净宽2m模式的待机状态,小型轿车可自由通行;
[0050]
若存在识别码图像,则收起限位装置3中的伸缩杆进行下一步骤;
[0051]
(3)获取识别码中的车辆信息;
[0052]
(4)根据车辆信息控制两个堤防道路限宽墩的墩体旋转,旋转结束限位装置进行限位。
[0053]
(41)获取车辆信息中的车宽l;若车宽小于2m,则继续保持净宽2m模式的待机状态;
[0054]
若识别出车宽大于2m,根据识别得到的车宽l,依据式(1)计算得出控制墩体旋转的转角θ,θ∈[0
°
,90
°
]。
[0055][0056]
式中,a、b分别为椭圆限宽墩长、短轴的长度(m);c为单侧安全加宽值(m); l为识别得到的车宽(m)。推导过程如下:假设椭圆限宽墩旋转θ角度后单侧净宽增值为δ,则l、δ、c满足式(2)、(3)所示关系。将式(3)结果代入式(2) 即可得出式(1)。
[0057]
l=2+2δ+2c
ꢀꢀꢀꢀꢀꢀ
(2)
[0058][0059]
(43)判断限位装置中的伸缩杆是否完全位于限位槽内,若伸缩杆没有完全位于限位槽内,增加转角,使伸缩杆完全位于限位槽内,墩体旋转结束,伸缩杆落入限位槽。在本实施例中,如图4所示,本实施例中以每10度设置一个圆形限位槽16为例,且每两个限位槽之间尽量临近,边缘两个限位槽的圆心位于椭圆形墩体的长轴和短轴上,设置的伸缩杆的直径为五分之一的限位槽直径,则若θ的取值在[(10n+4)
°
,(10n+6)
°
](n为0~9的整数),为确保限位装置顺利落入限位槽中,令此时旋转角度为(θ+5)
°
。根据限位槽的大小及间隔,适应性修改墩体转角的角度余量,以确保伸缩杆顺利落入限位槽中,起到限位作用。
[0060]
如图7所示,通过控制模块4发送指令给限位装置3和转动电机8,限位装置先升起伸缩杆,转动电机8再启动,通过传动轴9带动由钢盖板10、内侧钢板壁11、外侧钢板壁12和钢底板5组成的椭圆形钢柱体自动旋转角度θ,予以放行后,控制模块4再发送指令给电机8转动,从而恢复至净宽2m模式,进入净宽2m模式待机状态,限位装置再落下伸缩杆进行限位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1