一种道路检测装置及检测工艺的制作方法
1.本发明涉及检测设备领域,具体地讲,涉及一种道路检测装置及检测工艺。
背景技术:
2.道路铺设完成后,因地形沉降、变形、雨水冲刷、车辆行驶、重物碾压等原因,容易导致道路路边的变形,形成凹坑或凸起等引起道路形变,继而影响到路面行驶的安全,特别是机场跑道、赛车跑道、实验道路等道路,对道路的平整度要求极高;因此就需要长期对道路的平整度进行检测。
3.如果能够提供一种设备,实现对凹坑或凸起的测量以及位置标识,将有利于实现道路平整度检测。
技术实现要素:
4.本发明要解决的技术问题是提供一种道路检测装置及检测工艺,方便道路平整度检测。
5.本发明采用如下技术方案实现发明目的:
6.一种道路检测装置及检测工艺,包括支撑移动组件及检测组件,其特征在于:所述检测组件包括滑块,所述滑块固定连接电动推杆一,所述电动推杆一的推杆穿过所述滑块,所述电动推杆一的推杆端固定连接圆管,所述圆管固定连接对称的支撑杆,一个所述支撑杆固定连接l杆,所述l杆固定连接竖板二,所述圆管内设置有弹簧一及圆头杆,所述弹簧一的一端固定连接所述圆管,所述弹簧一的另一端固定连接所述圆头杆,所述圆管设置有对称的竖槽,所述圆头杆固定连接对称的圆杆二,所述圆杆二设置在所述竖槽内,所述滑块固定连接上传感器,所述圆杆二固定连接下传感器,所述上传感器匹配所述下传感器,所述竖板二轴承连接圆板,所述圆板的中心固定连接圆轴,所述圆轴转动连接两个空心管,所述空心管内设置有弹簧三及记号笔,所述弹簧三的一端固定连接所述空心管,所述弹簧三的另一端固定连接所述记号笔,所述圆板边缘处固定连接圆杆四,所述空心管固定连接弹簧一的一端,所述弹簧一的另一端固定连接所述圆杆四,所述圆板的边缘处固定连接圆杆三,所述圆杆二转动连接连杆四的一端,所述连杆四的另一端转动连接所述圆杆三,所述竖板二固定连接u架,所述u架固定连接两个挡块,所述挡块匹配所述空心管。
7.作为本技术方案的进一步限定,所述支撑移动组件包括两个横板,所述横板固定连接圆杆一,一个所述横板固定连接电机一,所述电机一的输出轴固定连接螺杆的一端,所述螺杆的另一端轴承连接另一个所述横板,所述螺杆螺纹连接所述滑块,所述圆杆一穿过所述滑块,所述横板两端螺纹连接调节螺杆,所述调节螺杆固定连接支撑圆板。
8.作为本技术方案的进一步限定,所述横板固定连接竖板一,所述竖板一固定连接上白板及下白板,所述长白板及所述下白板处于所述u架形成区域匹配所述记号笔。
9.作为本技术方案的进一步限定,所述滑块固定连接连接杆,所述连接杆固定连接除障组件,所述除障组件包括支架,所述连接杆固定连接所述支架,所述支架固定连接圆
柱,所述圆柱转动连接电动推杆二的一端,所述电动推杆二的推杆转动连接u板,所述u板固定连接竖杆,所述竖杆设置有直槽,所述竖杆固定连接l板,所述l板转动连接所述支架。
10.作为本技术方案的进一步限定,所述竖杆固定连接电机二,所述电机二的输出轴穿过所述竖杆,所述电机二的输出轴固定连接齿轮一,所述竖杆轴承连接齿轮二,所述齿轮一啮合所述齿轮二,所述齿轮二的偏心处转动连接连杆一的一端,所述连杆一的另一端转动连接t形块,所述t形块设置在所述直槽内,所述竖杆转动连接对称的连杆二的一端,所述连杆二的另一端转动连接连杆三的一端,所述连杆三的另一端转动连接所述t形块,所述t形块固定连接方杆,所述方杆设置在所述直槽内,所述方杆穿过所述竖杆的一端,所述方杆固定连接毛刷板,所述毛刷板固定连接传感器。
11.作为本技术方案的进一步限定,所述滑块固定连接对称的导向杆,所述导向杆穿过所述支撑杆。
12.一种道路检测工艺,其特征在于,包括以下步骤:
13.步骤一:将所述支撑圆板安装到合适位置;
14.通过设置设备观测两侧所述横板高度是否一致,不一致的话,调整所述调节螺杆,使两侧所述横板高度一致;
15.此时,所述圆头杆接触地面,并挤压一段所述弹簧一;
16.步骤二:操作所述电动推杆二往复伸缩,控制所述电机二转动,实现所述毛竖板往复摆动,清理路面落叶、碎石等障碍物;
17.步骤三:控制所述电机一转动,实现所述检测组件及所述除障组件向前移动;
18.步骤四:所述圆头杆遇到凸起时,所述圆头杆沿所述凸起移动,所述圆头杆挤压所述弹簧一,所述圆头杆带动所述圆杆二沿所述竖槽移动,所述圆杆二带动所述下传感器沿高度方向移动,所述上传感器间隔测量与所述下传感器间距,得出凸起高度分布,所述圆杆二带动所述连杆四摆动,所述连杆四带动所述圆杆三摆动,所述圆杆三带动所述圆板、所述圆轴、所述圆杆四、所述空心管、所述弹簧三、所述记号笔及所述弹簧二摆动,使上侧所述记号笔迅速接触所述上白板,上侧所述空心管接触所述挡块,使上侧所述记号笔竖直,上侧所述记号笔挤压上侧所述弹簧三,所述圆杆四与上侧所述空心管挤压上侧所述弹簧二,上侧所述记号笔在所述上白板上标识出凸起相对位置及长度;
19.步骤六:所述圆头杆遇到凹陷时,所述弹簧一恢复,所述上传感器间隔测量与所述下传感器间距,得出凹陷深度分布,下侧所述记号笔在所述下白板上标识出凹陷相对位置及长度。
20.作为本技术方案的进一步限定,所述电动推杆二往复伸缩时,所述电动推杆二带动所述u板往复摆动,所述电动推杆二往复摆动,所述u板带动所述竖杆、所述毛竖板及所述传感器等往复摆动。
21.作为本技术方案的进一步限定,所述电机二转动时,所述电机二带动所述齿轮一转动,所述齿轮一带动所述齿轮二往复摆动,所述齿轮二带动所述连杆一往复摆,所述连杆一带动所述t形块沿所述直槽往复移动,所述t形块带动所述连杆三往复摆,所述连杆三带动所述连杆二往复摆动,所述t形块带动所述方杆沿所述直槽往复移动,所述方杆带动所述毛竖板及所述传感器往复移动。
22.作为本技术方案的进一步限定,所述传感器探测到前进方向有坡度较大的凹陷
时,控制所述电动推杆一收缩,避免所述圆头杆受到损伤。
23.与现有技术相比,本发明的优点和积极效果是:
24.1、本装置通过设置上下分布的记号笔,在遇到凸起或凹陷时,在弹簧一作用下,圆头杆位置发生变化,通过连杆四的连接,实现记号笔摆动,通过挡块限位空心管,保持记号笔竖直,使记号笔在上白板或下白板上标识出凸起或凹陷相对位置及长度。
25.2、本装置通过设置传感器,传感器往复摆动探测凸起或凹陷的宽度;传感器探测到前进方向有坡度较大的凹陷时,控制电动推杆一收缩,避免圆头杆受到损伤。
26.3、本装置通过巧妙地设计,实现通过上传感器与下传感器间距变化,计算出凸起高度分布及大致长度,凹陷深度分布及大致长度,将数据传递给上位机,传感器往复摆动探测出凸起或凹陷的宽度分布,实现凸起或凹陷三维数据收集。方便工作人员建立凸起或凹陷三维模型,方便后续的道路维护。
附图说明
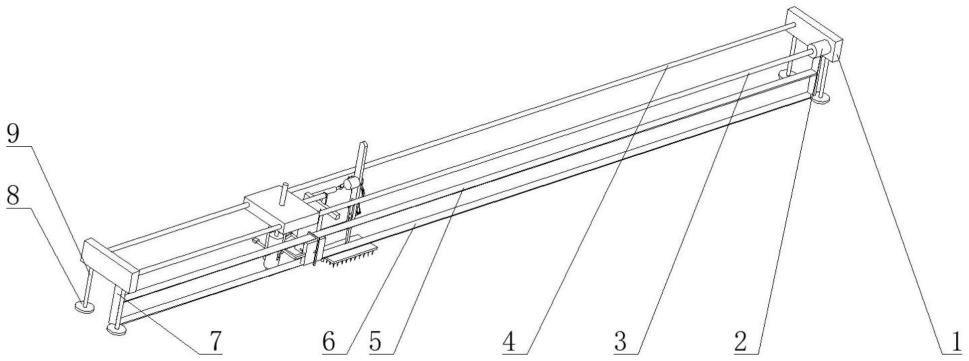
27.图1为本发明的立体结构示意图一。
28.图2为本发明的检测组件立体结构示意图。
29.图3为本发明的检测组件局部剖开立体结构示意图一。
30.图4为本发明的检测组件局部立体结构示意图一。
31.图5为本发明的检测组件局部立体结构示意图二。
32.图6为本发明的检测组件局部剖开立体结构示意图二。
33.图7为本发明的除障组件立体结构示意图一。
34.图8为本发明的除障组件立体结构示意图二。
35.图9为本发明的检测组件局部立体结构示意图三。
36.图10为本发明的除障组件局部立体结构示意图。
37.图11为本发明的立体结构示意图二。
38.图中:1、横板,2、电机一,3、螺杆,4、圆杆一,5、上白板,6、下白板,7、竖板一,8、支撑圆板,9、调节螺杆,10、连接杆,11、滑块,12、导向杆,13、电动推杆一,14、上传感器,15、圆管,16、弹簧一,17、竖槽,18、圆头杆,19、支撑杆,20、圆杆二,21、竖板二,22、u架,23、挡块,24、圆板,25、圆轴,26、圆杆三,27、圆杆四,28、记号笔,29、空心管,30、弹簧二,31、弹簧三,32、支架,33、圆柱,34、电机二,35、电动推杆二,36、竖杆,37、直槽,38、t形块,39、方杆,40、毛刷板,41、传感器,42、l板,43、齿轮一,44、u板,45、齿轮二,46、连杆一,47、连杆二,48、连杆三,49、l杆,50、下传感器,51、连杆四。
具体实施方式
39.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
40.本发明包括支撑移动组件及检测组件,所述检测组件包括滑块11,所述滑块11固定连接电动推杆一13,所述电动推杆一13的推杆穿过所述滑块11,所述电动推杆一13的推杆端固定连接圆管15,所述圆管15固定连接对称的支撑杆19,一个所述支撑杆19固定连接l杆49,所述l杆49固定连接竖板二21,所述圆管15内设置有弹簧一16及圆头杆18,所述弹簧
一16的一端固定连接所述圆管15,所述弹簧一16的另一端固定连接所述圆头杆18,所述圆管15设置有对称的竖槽17,所述圆头杆18固定连接对称的圆杆二20,所述圆杆二20设置在所述竖槽17内,所述滑块11固定连接上传感器14,所述圆杆二20固定连接下传感器50,所述上传感器14匹配所述下传感器50,所述竖板二21轴承连接圆板24,所述圆板24的中心固定连接圆轴25,所述圆轴25转动连接两个空心管29,所述空心管29内设置有弹簧三31及记号笔28,所述弹簧三31的一端固定连接所述空心管29,所述弹簧三31的另一端固定连接所述记号笔28,所述圆板24边缘处固定连接圆杆四27,所述空心管29固定连接弹簧一30的一端,所述弹簧一30的另一端固定连接所述圆杆四27,所述圆板24的边缘处固定连接圆杆三26,所述圆杆二20转动连接连杆四51的一端,所述连杆四51的另一端转动连接所述圆杆三26,所述竖板二21固定连接u架22,所述u架22固定连接两个挡块23,所述挡块23匹配所述空心管29。
41.所述支撑移动组件包括两个横板1,所述横板1固定连接圆杆一4,一个所述横板1固定连接电机一2,所述电机一2的输出轴固定连接螺杆3的一端,所述螺杆3的另一端轴承连接另一个所述横板1,所述螺杆3螺纹连接所述滑块11,所述圆杆一4穿过所述滑块11,所述横板1两端螺纹连接调节螺杆9,所述调节螺杆9固定连接支撑圆板8。
42.所述横板1固定连接竖板一7,所述竖板一7固定连接上白板5及下白板6,所述长白板5及所述下白板6处于所述u架22形成区域匹配所述记号笔28。
43.所述滑块11固定连接连接杆10,所述连接杆10固定连接除障组件,所述除障组件包括支架32,所述连接杆10固定连接所述支架32,所述支架32固定连接圆柱33,所述圆柱33转动连接电动推杆二35的一端,所述电动推杆二35的推杆转动连接u板44,所述u板44固定连接竖杆36,所述竖杆36设置有直槽37,所述竖杆36固定连接l板42,所述l板42转动连接所述支架32。
44.所述竖杆36固定连接电机二34,所述电机二34的输出轴穿过所述竖杆36,所述电机二34的输出轴固定连接齿轮一43,所述竖杆36轴承连接齿轮二45,所述齿轮一43啮合所述齿轮二45,所述齿轮二45的偏心处转动连接连杆一46的一端,所述连杆一46的另一端转动连接t形块38,所述t形块38设置在所述直槽37内,所述竖杆36转动连接对称的连杆二47的一端,所述连杆二47的另一端转动连接连杆三48的一端,所述连杆三48的另一端转动连接所述t形块38,所述t形块38固定连接方杆39,所述方杆39设置在所述直槽37内,所述方杆39穿过所述竖杆36的一端,所述方杆39固定连接毛刷板40,所述毛刷板40固定连接传感器41。
45.所述滑块11固定连接对称的导向杆12,所述导向杆12穿过所述支撑杆19。
46.一种道路检测工艺,包括以下步骤:
47.步骤一:将所述支撑圆板8安装到合适位置;
48.通过设置设备观测两侧所述横板1高度是否一致,不一致的话,调整所述调节螺杆9,使两侧所述横板1高度一致;
49.此时,所述圆头杆18接触地面,并挤压一段所述弹簧一16;
50.步骤二:操作所述电动推杆二35往复伸缩,控制所述电机二34转动,实现所述毛竖板40往复摆动,清理路面落叶、碎石等障碍物;
51.步骤三:控制所述电机一2转动,实现所述检测组件及所述除障组件向前移动;
52.步骤四:所述圆头杆18遇到凸起时,所述圆头杆18沿所述凸起移动,所述圆头杆18挤压所述弹簧一16,所述圆头杆18带动所述圆杆二20沿所述竖槽17移动,所述圆杆二20带动所述下传感器50沿高度方向移动,所述上传感器14间隔测量与所述下传感器50间距,得出凸起高度分布,所述圆杆二20带动所述连杆四51摆动,所述连杆四51带动所述圆杆三26摆动,所述圆杆三26带动所述圆板24、所述圆轴25、所述圆杆四27、所述空心管29、所述弹簧三31、所述记号笔28及所述弹簧二30摆动,使上侧所述记号笔28迅速接触所述上白板5,上侧所述空心管29接触所述挡块23,使上侧所述记号笔28竖直,上侧所述记号笔28挤压上侧所述弹簧三31,所述圆杆四27与上侧所述空心管29挤压上侧所述弹簧二30,上侧所述记号笔28在所述上白板5上标识出凸起相对位置及长度;
53.步骤六:所述圆头杆18遇到凹陷时,所述弹簧一16恢复,所述上传感器14间隔测量与所述下传感器50间距,得出凹陷深度分布,下侧所述记号笔28在所述下白板6上标识出凹陷相对位置及长度。
54.所述电动推杆二35往复伸缩时,所述电动推杆二35带动所述u板44往复摆动,所述电动推杆二35往复摆动,所述u板44带动所述竖杆36、所述毛竖板40及所述传感器41等往复摆动。
55.所述电机二34转动时,所述电机二34带动所述齿轮一43转动,所述齿轮一43带动所述齿轮二45往复摆动,所述齿轮二45带动所述连杆一46往复摆,所述连杆一46带动所述t形块38沿所述直槽37往复移动,所述t形块38带动所述连杆三48往复摆,所述连杆三48带动所述连杆二47往复摆动,所述t形块38带动所述方杆39沿所述直槽37往复移动,所述方杆39带动所述毛竖板40及所述传感器41往复移动。
56.所述传感器41探测到前进方向有坡度较大的凹陷时,控制所述电动推杆一13收缩,避免所述圆头杆18受到损伤。
57.所述电机一2、所述电机二34、所述电动推杆一13、所述电动推杆二35、所述上传感器14、所述下传感器50及所述传感器41分别电性连接控制器,所述控制器无线连接上位机。
58.本发明的工作流程为:将支撑圆板8安装到合适位置,通过设置设备观测两侧横板1高度是否一致,不一致的话,调整调节螺杆9,使两侧横板1高度一致,此时,圆头杆18接触地面,并挤压一段弹簧一16。
59.操作电动推杆二35往复伸缩,控制电机二34转动,电动推杆二35往复伸缩时,电动推杆二35带动u板44往复摆动,电动推杆二35往复摆动,u板44带动竖杆36、毛竖板40及传感器41等往复摆动。
60.电机二34转动时,电机二34带动齿轮一43转动,齿轮一43带动齿轮二45往复摆动,齿轮二45带动连杆一46往复摆,连杆一46带动t形块38沿直槽37往复移动,t形块38带动连杆三48往复摆,连杆三48带动连杆二47往复摆动,t形块38带动方杆39沿直槽37往复移动,方杆39带动毛竖板40及传感器41往复移动。实现毛竖板40往复摆动,清理路面落叶、碎石等障碍物。
61.控制电机一2转动,实现检测组件及除障组件向前移动。圆头杆18遇到凸起时,圆头杆18沿凸起移动,圆头杆18挤压弹簧一16,圆头杆18带动圆杆二20沿竖槽17移动,圆杆二20带动下传感器50沿高度方向移动,上传感器14间隔测量与下传感器50间距,得出凸起高度分布,圆杆二20带动连杆四51摆动,连杆四51带动圆杆三26摆动,圆杆三26带动圆板24、
圆轴25、圆杆四27、空心管29、弹簧三31、记号笔28及弹簧二30摆动,使上侧记号笔28迅速接触上白板5,上侧空心管29接触挡块23,使上侧记号笔28竖直,上侧记号笔28挤压上侧弹簧三31,圆杆四27与上侧空心管29挤压上侧弹簧二30,上侧记号笔28在上白板5上标识出凸起相对位置及长度。圆头杆18遇到凹陷时,弹簧一16恢复,上传感器14间隔测量与下传感器50间距,得出凹陷深度分布,下侧记号笔28在下白板6上标识出凹陷相对位置及长度。
62.传感器41探测到前进方向有坡度较大的凹陷时,控制电动推杆一13收缩,避免圆头杆18受到损伤。
63.本装置对于凹陷深度的探测最深距离为,调整调节螺杆9后弹簧一16的压缩量。
64.传感器41往复摆动探测凸起或凹陷的宽度。
65.控制器通过上传感器14与下传感器50间距变化,计算出凸起高度分布及大致长度,凹陷深度分布及大致长度,将数据传递给上位机,传感器41往复摆动探测出凸起或凹陷的宽度分布,实现凸起或凹陷三维数据收集。
66.本装置通过设置上下分布的记号笔28,在遇到凸起或凹陷时,在弹簧一16作用下,圆头杆18位置发生变化,通过连杆四51的连接,实现记号笔28摆动,通过挡块23限位空心管29,保持记号笔28竖直,使记号笔28在上白板5或下白板6上标识出凸起或凹陷相对位置及长度。
67.本装置通过设置传感器41,传感器41往复摆动探测凸起或凹陷的宽度;传感器41探测到前进方向有坡度较大的凹陷时,控制电动推杆一13收缩,避免圆头杆18受到损伤。
68.本装置通过巧妙地设计,实现通过上传感器14与下传感器50间距变化,计算出凸起高度分布及大致长度,凹陷深度分布及大致长度,将数据传递给上位机,传感器41往复摆动探测出凸起或凹陷的宽度分布,实现凸起或凹陷三维数据收集。方便工作人员建立凸起或凹陷三维模型,方便后续的道路维护。
69.以上公开的仅为本发明的具体实施例,但是,本发明并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1