一种桥梁施工用裂缝检测修补系统的制作方法
1.本发明属于桥梁裂缝检测修补技术领域,具体是指一种桥梁施工用裂缝检测修补系统。
背景技术:
2.受温度变化以及载荷作用等因素的影响,桥梁表面会产生大大小小的裂缝,为延长桥梁的使用寿命,需要及时对裂缝进行修补。
3.由于裂缝的周围往往存在有石子等大颗粒杂物,以及污渍和小颗粒杂物,需要工人在修补前采用扫帚和撮子等工具对裂缝周围石子等大颗粒杂物进行清理,之后,通过高压水枪和毛刷等工具将裂缝周围以及裂缝中的污渍和小颗粒杂物清除,在清理完毕后,通过手工灌注修补剂的方式对裂缝进行修补,采用此种方式时,不仅费时费力,且效率低下,清理石子等大颗粒杂物时会产生灰尘飞扬的状况,从而危害工人的健康,清理污渍和小颗粒杂物时会导致桥梁的路面格外脏乱。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本发明提供了一种桥梁施工用裂缝检测修补系统,针对现有的修补方式的不仅费时费力,且效率低下的技术问题,本方案通过设置裂缝识别模块对裂缝进行准确识别,能够在保留裂缝特征的前提下将原始图像中的噪声去除,减轻光照对识别过程的影响,使裂缝能够完整地被提取出来,且识别的准确性高,同时,通过修补机构对快速裂缝进行修补,提高了效率,降低了人力成本。
5.本发明采取的技术方案如下:本发明提供的一种桥梁施工用裂缝检测修补系统,包括车体、预处理机构、雾化清洁回收组件和修补机构,所述预处理机构、雾化清洁回收组件和修补机构自前往后依次设于车体上,所述车体上设有控制器,所述控制器内设有裂缝识别模块。
6.作为本方案的进一步改进,所述预处理机构包括调节调节组件、预处理罩体、清理组件和预清理组件,所述调节调节组件设于车体的前端,所述调节调节组件包括预处理调节固定板、预处理调节丝杆、预处理调节传动轮、预处理调节传动带和预处理调节电机,所述预处理调节固定板对称设于车体的前端,所述预处理调节丝杆转动设于预处理调节固定板上,所述预处理调节传动轮转动设于预处理调节固定板上,所述预处理调节传动轮与预处理调节丝杆同轴固接,所述预处理调节传动带绕设于预处理调节传动轮上,所述预处理调节电机设于预处理调节固定板上,所述预处理调节电机的输出端与预处理调节丝杆同轴固接,所述预处理罩体螺纹连接设于预处理调节丝杆上,所述预处理罩体呈底部开口设置,所述预处理罩体内设有清理分隔板,所述清理组件设于预处理罩体上,所述清理组件包括防护罩、一级驱动传动轮、一级从动传动轮、一级驱动传动带、清理驱动电机、清理驱动齿轮、清理从动齿轮、二级传动轮、二级传动带、清洁盘和毛刷层,所述防护罩设于预处理罩体上,所述一级驱动传动轮转动设于预处理罩体上且设于清理分隔板内,所述一级从动传动
轮转动设于预处理罩体上且设于清理分隔板内,所述一级驱动传动带绕设于一级驱动传动轮和一级从动传动轮上,所述清理驱动电机设于预处理罩体上且设于清理分隔板内,所述清理驱动电机的输出端与一级驱动传动轮同轴固接,所述清理驱动齿轮转动设于预处理罩体内且设于清理分隔板的上方,所述清理驱动齿轮与一级从动传动轮同轴固接,所述清理从动齿轮转动设于预处理罩体内且设于清理分隔板的上方,所述清理从动齿轮与清理驱动齿轮呈啮合设置,所述二级传动轮转动设于预处理罩体内且设于清理分隔板的上方,所述二级传动带绕设于二级传动轮上,所述清理驱动齿轮与靠近清理驱动齿轮的一组二级传动轮同轴固接,所述清理从动齿轮与靠近清理从动齿轮的一组二级传动轮同轴固接,多组所述清洁盘转动设于预处理罩体内且设于清理分隔板的下方,所述清洁盘与二级传动轮同轴固接,所述毛刷层设于清洁盘的底部。
7.作为本方案的进一步改进,所述预清理组件设于预处理罩体上远离车体一侧的外侧壁上,所述预清理组件包括预清理环形嵌套板、预清理环形板和固定螺栓,所述预清理环形嵌套板设于预处理罩体上远离车体一侧的外侧壁上,所述预清理环形板滑动插拔连接设于预清理环形嵌套板上,所述固定螺栓螺纹连接设于预清理环形嵌套板上,所述固定螺栓与预清理环形板触接。
8.作为本方案的进一步改进,所述雾化清洁回收组件包括储水箱、收集箱、出气通孔、排气扇叶、排气罩、弧形雾化喷头、柔弹性雾化喷射管道、出液管道、收集罩、汇集罩和柔弹性收集管道,所述储水箱设于车体上,所述储水箱上设有透明可视窗一,所述收集箱设于车体上,所述收集箱内设有过滤网板,所述收集箱上设有箱门,所述出气通孔设于收集箱上,所述排气扇叶转动设于出气通孔内,所述排气罩罩设于出气通孔上且设于收集箱外,所述弧形雾化喷头设于预处理罩体内远离车体一侧的侧壁上,所述弧形雾化喷头设于清理分隔板的下方,所述弧形雾化喷头的底部呈阵列分布设有若干组喷射孔,所述柔弹性雾化喷射管道的一端连通设于排气罩上,所述柔弹性雾化喷射管道的另一端连通设于弧形雾化喷头上,所述柔弹性雾化喷射管道内依次连通设有气流进入腔、气流压缩腔和气流送出腔,所述气流进入腔与排气罩呈连通设置,所述气流送出腔与弧形雾化喷头呈连通设置,气流压缩腔从气流进入腔到气流送出腔方向的横截面积逐渐减小,气流进入腔的横截面积与气流压缩腔靠近气流进入腔一端的横截面积相等,气流送出腔的横截面积与气流压缩腔上靠近气流送出腔一端的横截面积相等,所述出液管道的下端连通设于储水箱上,所述出液管道的上端连通设于气流送出腔上靠近气流压缩腔的一端,所述汇集罩连通设于收集箱上远离出气通孔一侧的侧壁上,所述收集罩设于预处理罩体内靠近车体一侧的侧壁上,所述柔弹性收集管道的一端与收集罩呈连通设置,所述柔弹性收集管道的另一端与汇集罩呈连通设置。
9.进一步地,所述修补机构包括调节组件和修补组件,所述调节组件设于车体后端的底部,所述修补组件设于车体的后端。
10.进一步地,所述调节组件包括横向调节电机、横向调节丝杆、横向调节传动轮、横向调节传动带、横向调节座、纵向调节丝杆、纵向调节电机、纵向调节传动轮、纵向调节传动带、纵向调节座和竖向调节电推杆,所述横向调节丝杆对称转动设于车体的底部,所述横向调节电机设于车体的底部,所述横向调节电机的输出端与靠近横向调节电机的一组横向调节丝杆同轴固接,所述横向调节传动轮对称转动设于车体的底部,所述横向调节传动轮与
横向调节丝杆同轴固接,所述横向调节传动带绕设于横向调节传动轮上,所述横向调节座螺纹连接设于横向调节丝杆上,所述纵向调节丝杆对称转动设于横向调节座的底部,所述纵向调节电机设于横向调节座的底部,所述纵向调节电机的输出端与靠近纵向调节电机的一组纵向调节丝杆同轴固接,所述纵向调节传动轮对称转动设于横向调节座的底部,所述纵向调节传动带绕设于纵向调节传动轮上,所述纵向调节座螺纹连接设于纵向调节丝杆上,所述竖向调节电推杆设于纵向调节座的底部。
11.进一步地,所述修补组件包括存储筒体、输送泵、连通管道和柔弹性输送管道,所述存储筒体设于车体的后端,所述存储筒体上设有液位观察窗二,所述输送泵设于车体的后端,所述连通管道连通设于存储筒体和输送泵之间,所述竖向调节电推杆的下端设有修补头,所述柔弹性输送管道的一端连通设于输送泵上,所述柔弹性输送管道的另一端连通设于修补头上。
12.优选的,所述车体的底部设有图像采集摄像头,所述图像采集摄像头设于预处理罩体和修补组件之间,所述图像采集摄像头用于得到原始图像,所述裂缝识别模块包括图像预处理模块和裂缝提取模块,所述图像预处理模块包括图像模糊模块、图像增强模块、阈值分割模块和形态学运算模块,所述图像预处理模块包括图像模糊模块、图像增强模块、阈值分割模块和形态学运算模块,所述图像模糊模块采用高斯函数对原始图像进行处理,并得到图像二,所述图像模糊模块在保留裂缝特征的前提下将原始图像中的噪声去除,高斯函数的计算公式为:
[0013][0014]
式中,g(u,v)为高斯函数,(u,v)为像素点的坐标,σ为分布函数标准差;
[0015]
所述图像增强模块用于突出图像二的亮度特征和边缘特征,以减轻光照的影响,并得到图像三,所述阈值分割模块用于区分图像三的裂缝特征和背景,并得到图像四,所述形态学运算模块用于对图像四中的特征区域进行扩大或者缩小,并得到图像五,裂缝提取模块包括图像孤立点消除模块和裂缝骨架提取模块,所述图像孤立点消除模块用于消除图像五中的噪声点,并得到图像六,所述图像孤立点消除模块的操作步骤如下:
[0016]
①
标记连通域;
[0017]
②
孤立点消除;
[0018]
③
裂缝碎片拼接;
[0019]
所述裂缝骨架提取模块用于对图像六的裂缝进行骨架提取,并得到图像七。
[0020]
优选的,所述车体上设有收发天线,所述车体上设有蓄电池,所述车体的两侧对称设有两两为一组的行进轮,所述控制器无线连接有遥控器,所述遥控器上设有信号收发器,所述蓄电池与收发天线、图像采集摄像头、控制器、输送泵、横向调节电机、纵向调节电机、排气扇叶、预处理调节电机和清理驱动电机电性连接,所述控制器为stm32型号的单片机。
[0021]
采用上述方案本发明取得的有益效果如下:
[0022]
(1)针对现有的修补方式的不仅费时费力,且效率低下的技术问题,本方案通过设置裂缝识别模块对裂缝进行准确识别,能够在保留裂缝特征的前提下将原始图像中的噪声去除,减轻光照对识别过程的影响,使裂缝能够完整地被提取出来,且识别的准确性高,同时,通过修补机构对快速裂缝进行修补,提高了效率,降低了人力成本。
[0023]
(2)针对现有技术中大颗粒杂物的清理方式会危害工人健康的技术问题,本方案通过设置预清理组件对大颗粒杂物进行阻挡,解决了现有的清理方式带来的危害工人健康的技术问题,同时,能够避免大颗粒杂物对裂缝识别过程带来的不利影响,保证了裂缝识别结果的准确性。
[0024]
(3)针对现有技术中污渍和小颗粒杂物的清理方式会导致桥梁的路面格外脏乱的技术问题,本方案通过设置清理组件对污渍进行清理,并通过设置雾化清洁回收组件对小颗粒杂物,以及清理过程中产生的污水等进行清理,使清理后的路面格外干净整洁,从而避免了污渍、污水和小颗粒杂物对裂缝识别过程带来的不利影响,提高了裂缝识别结果的准确性。
[0025]
(4)在毛刷层与地面的污渍摩擦时会产生大量的热量,当热量过高时,容易使毛刷层受损,需要频繁更换毛刷层,为此,本方案通过喷射水雾对地面进行湿润,湿润的地面能够吸收摩擦时产生的热量,避免了因热量过高而导致毛刷层受损的状况,延长了毛刷层的使用寿命,解决了需要频繁更换毛刷层的问题,节约了成本,同时,水雾能够对污渍进行软化,有利于对污渍进行清洁。
附图说明
[0026]
图1为本发明提供的一种桥梁施工用裂缝检测修补系统的结构示意图;
[0027]
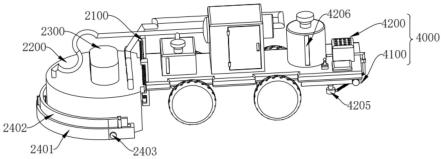
图2为本发明提供的一种桥梁施工用裂缝检测修补系统的整体结构示意图;
[0028]
图3为遥控器的整体结构示意图;
[0029]
图4为本发明提供的一种桥梁施工用裂缝检测修补系统的仰视图;
[0030]
图5为本发明提供的一种桥梁施工用裂缝检测修补系统的俯视图;
[0031]
图6为本发明提供的一种桥梁施工用裂缝检测修补系统的右视图;
[0032]
图7为本发明提供的一种桥梁施工用裂缝检测修补系统的左视图;
[0033]
图8为图7中a-a部分的平面剖视图;
[0034]
图9为图6中b-b部分的平面剖视图;
[0035]
图10为图6中c-c部分的平面剖视图;
[0036]
图11为图6中d-d部分的平面剖视图;
[0037]
图12为图7中e-e部分的平面剖视图;
[0038]
图13为图5中f-f部分的平面剖视图;
[0039]
图14为图6中g-g部分的平面剖视图;
[0040]
图15为图10中a部分的局部放大示意图;
[0041]
图16为图11中b部分的局部放大示意图;
[0042]
图17为图13中b部分的局部放大示意图;
[0043]
图18为图像采集摄像头获取的原始图像;
[0044]
图19为阈值分割模块处理后得到的图像四;
[0045]
图20为形态学运算模块处理后得到的图像五;
[0046]
图21为图像孤立点消除模块处理后得到的图像六;
[0047]
图22为图像采集摄像头和裂缝识别模块的工作流程图。
[0048]
其中,1000、车体,2000、预处理机构,2100、预处理调节组件,2101、预处理调节固
定板,2102、预处理调节丝杆,2103、预处理调节传动轮,2104、预处理调节传动带,2105、预处理调节电机,2200、预处理罩体,2201、清理分隔板,2300、清理组件,2301、防护罩,2302、一级驱动传动轮,2303、一级从动传动轮,2304、一级驱动传动带,2305、清理驱动电机,2306、清理驱动齿轮,2307、清理从动齿轮,2308、二级传动轮,2309、二级传动带,2310、清洁盘,2311、毛刷层,2400、预清理组件,2401、预清理环形嵌套板,2402、预清理环形板,2403、固定螺栓,3000、雾化清洁回收组件,3001、储水箱,3002、收集箱,3003、出气通孔,3004、排气扇叶,3005、排气罩,3006、弧形雾化喷头,3007、柔弹性雾化喷射管道,3008、出液管道,3009、收集罩,3010、汇集罩,3011、柔弹性收集管道,3012、透明可视窗一,3013、过滤网板,3014、箱门,3015、喷射孔,3016、气流进入腔,3017、气流压缩腔,3018、气流送出腔,4000、修补机构,4100、调节组件,4101、横向调节电机,4102、横向调节丝杆,4103、横向调节传动轮,4104、横向调节传动带,4105、横向调节座,4106、纵向调节丝杆,4107、纵向调节电机,4108、纵向调节传动轮,4109、纵向调节传动带,4110、纵向调节座,4111、竖向调节电推杆,4200、修补组件,4201、存储筒体,4202、输送泵,4203、连通管道,4204、柔弹性输送管道,4205、修补头,4206、液位观察窗二,5000、裂缝识别模块,5100、图像预处理模块,5101、图像模糊模块,5102、图像增强模块,5103、阈值分割模块,5104、形态学运算模块,5200、裂缝提取模块,5201、图像孤立点消除模块,5202、裂缝骨架提取模块,6001、图像采集摄像头,6002、收发天线,6003、蓄电池,6004、行进轮,6005、遥控器,6006、信号收发器,6007、控制器。
[0049]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
具体实施方式
[0050]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0051]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0052]
参阅图1、图2、图5和图22,本发明提供的一种桥梁施工用裂缝检测修补系统,包括车体1000、预处理机构2000、雾化清洁回收组件3000和修补机构4000,所述预处理机构2000、雾化清洁回收组件3000和修补机构4000自前往后依次设于车体1000上,所述车体1000上设有控制器6007,所述控制器6007内设有裂缝识别模块5000。
[0053]
参阅图1、图2、图8、图9、图10、图12和图14,所述预处理机构2000包括调节调节组件2100、预处理罩体2200、清理组件2300和预清理组件2400,所述调节调节组件2100设于车体1000的前端,所述调节调节组件2100包括预处理调节固定板2101、预处理调节丝杆2102、预处理调节传动轮2103、预处理调节传动带2104和预处理调节电机2105,所述预处理调节固定板2101对称设于车体1000的前端,所述预处理调节丝杆2102转动设于预处理调节固定板2101上,所述预处理调节传动轮2103转动设于预处理调节固定板2101上,所述预处理调
节传动轮2103与预处理调节丝杆2102同轴固接,所述预处理调节传动带2104绕设于预处理调节传动轮2103上,所述预处理调节电机2105设于预处理调节固定板2101上,所述预处理调节电机2105的输出端与预处理调节丝杆2102同轴固接,所述预处理罩体2200螺纹连接设于预处理调节丝杆2102上,所述预处理罩体2200呈底部开口设置,所述预处理罩体2200内设有清理分隔板2201,所述清理组件2300设于预处理罩体2200上,所述清理组件2300包括防护罩2301、一级驱动传动轮2302、一级从动传动轮2303、一级驱动传动带2304、清理驱动电机2305、清理驱动齿轮2306、清理从动齿轮2307、二级传动轮2308、二级传动带2309、清洁盘2310和毛刷层2311,所述防护罩2301设于预处理罩体2200上,所述一级驱动传动轮2302转动设于预处理罩体2200上且设于清理分隔板2201内,所述一级从动传动轮2303转动设于预处理罩体2200上且设于清理分隔板2201内,所述一级驱动传动带2304绕设于一级驱动传动轮2302和一级从动传动轮2303上,所述清理驱动电机2305设于预处理罩体2200上且设于清理分隔板2201内,所述清理驱动电机2305的输出端与一级驱动传动轮2302同轴固接,所述清理驱动齿轮2306转动设于预处理罩体2200内且设于清理分隔板2201的上方,所述清理驱动齿轮2306与一级从动传动轮2303同轴固接,所述清理从动齿轮2307转动设于预处理罩体2200内且设于清理分隔板2201的上方,所述清理从动齿轮2307与清理驱动齿轮2306呈啮合设置,所述二级传动轮2308转动设于预处理罩体2200内且设于清理分隔板2201的上方,所述二级传动带2309绕设于二级传动轮2308上,所述清理驱动齿轮2306与靠近清理驱动齿轮2306的一组二级传动轮2308同轴固接,所述清理从动齿轮2307与靠近清理从动齿轮2307的一组二级传动轮2308同轴固接,多组所述清洁盘2310转动设于预处理罩体2200内且设于清理分隔板2201的下方,所述清洁盘2310与二级传动轮2308同轴固接,所述毛刷层2311设于清洁盘2310的底部,所述预清理组件2400设于预处理罩体2200上远离车体1000一侧的外侧壁上,所述预清理组件2400包括预清理环形嵌套板2401、预清理环形板2402和固定螺栓2403,所述预清理环形嵌套板2401设于预处理罩体2200上远离车体1000一侧的外侧壁上,所述预清理环形板2402滑动插拔连接设于预清理环形嵌套板2401上,所述固定螺栓2403螺纹连接设于预清理环形嵌套板2401上,所述固定螺栓2403与预清理环形板2402触接。
[0054]
参阅图1、图2、图4、图5、图7、图12、图13、图14和图17,所述雾化清洁回收组件3000包括储水箱3001、收集箱3002、出气通孔3003、排气扇叶3004、排气罩3005、弧形雾化喷头3006、柔弹性雾化喷射管道3007、出液管道3008、收集罩3009、汇集罩3010和柔弹性收集管道3011,所述储水箱3001设于车体1000上,所述储水箱3001上设有透明可视窗一3012,所述收集箱3002设于车体1000上,所述收集箱3002内设有过滤网板3013,所述收集箱3002上设有箱门3014,所述出气通孔3003设于收集箱3002上,所述排气扇叶3004转动设于出气通孔3003内,所述排气罩3005罩设于出气通孔3003上且设于收集箱3002外,所述弧形雾化喷头3006设于预处理罩体2200内远离车体1000一侧的侧壁上,所述弧形雾化喷头3006设于清理分隔板2201的下方,所述弧形雾化喷头3006的底部呈阵列分布设有若干组喷射孔3015,所述柔弹性雾化喷射管道3007的一端连通设于排气罩3005上,所述柔弹性雾化喷射管道3007的另一端连通设于弧形雾化喷头3006上,所述柔弹性雾化喷射管道3007内依次连通设有气流进入腔3016、气流压缩腔3017和气流送出腔3018,所述气流进入腔3016与排气罩3005呈连通设置,所述气流送出腔3018与弧形雾化喷头3006呈连通设置,气流压缩腔3017从气流进入腔3016到气流送出腔3018方向的横截面积逐渐减小,气流进入腔3016的横截面积与气
流压缩腔3017靠近气流进入腔3016一端的横截面积相等,气流送出腔3018的横截面积与气流压缩腔3017上靠近气流送出腔3018一端的横截面积相等,所述出液管道3008的下端连通设于储水箱3001上,所述出液管道3008的上端连通设于气流送出腔3018上靠近气流压缩腔3017的一端,所述汇集罩3010连通设于收集箱3002上远离出气通孔3003一侧的侧壁上,所述收集罩3009设于预处理罩体2200内靠近车体1000一侧的侧壁上,所述柔弹性收集管道3011的一端与收集罩3009呈连通设置,所述柔弹性收集管道3011的另一端与汇集罩3010呈连通设置。
[0055]
参阅图1、图2、图6、图10、图11、图15和图16,所述修补机构4000包括调节组件4100和修补组件4200,所述调节组件4100设于车体1000后端的底部,所述修补组件4200设于车体1000的后端,所述调节组件4100包括横向调节电机4101、横向调节丝杆4102、横向调节传动轮4103、横向调节传动带4104、横向调节座4105、纵向调节丝杆4106、纵向调节电机4107、纵向调节传动轮4108、纵向调节传动带4109、纵向调节座4110和竖向调节电推杆4111,所述横向调节丝杆4102对称转动设于车体1000的底部,所述横向调节电机4101设于车体1000的底部,所述横向调节电机4101的输出端与靠近横向调节电机4101的一组横向调节丝杆4102同轴固接,所述横向调节传动轮4103对称转动设于车体1000的底部,所述横向调节传动轮4103与横向调节丝杆4102同轴固接,所述横向调节传动带4104绕设于横向调节传动轮4103上,所述横向调节座4105螺纹连接设于横向调节丝杆4102上,所述纵向调节丝杆4106对称转动设于横向调节座4105的底部,所述纵向调节电机4107设于横向调节座4105的底部,所述纵向调节电机4107的输出端与靠近纵向调节电机4107的一组纵向调节丝杆4106同轴固接,所述纵向调节传动轮4108对称转动设于横向调节座4105的底部,所述纵向调节传动带4109绕设于纵向调节传动轮4108上,所述纵向调节座4110螺纹连接设于纵向调节丝杆4106上,所述竖向调节电推杆4111设于纵向调节座4110的底部,所述修补组件4200包括存储筒体4201、输送泵4202、连通管道4203和柔弹性输送管道4204,所述存储筒体4201设于车体1000的后端,所述存储筒体4201上设有液位观察窗二4206,所述输送泵4202设于车体1000的后端,所述连通管道4203连通设于存储筒体4201和输送泵4202之间,所述竖向调节电推杆4111的下端设有修补头4205,所述柔弹性输送管道4204的一端连通设于输送泵4202上,所述柔弹性输送管道4204的另一端连通设于修补头4205上。
[0056]
参阅图1、图2、图4、图18、图19、图20、图21和图22,所述车体1000的底部设有图像采集摄像头6001,所述图像采集摄像头6001设于预处理罩体2200和修补组件4200之间,所述图像采集摄像头6001用于得到原始图像,所述裂缝识别模块5000包括图像预处理模块5100和裂缝提取模块5200,所述图像预处理模块5100包括图像模糊模块5101、图像增强模块5102、阈值分割模块5103和形态学运算模块5104,所述图像预处理模块5100包括图像模糊模块5101、图像增强模块5102、阈值分割模块5103和形态学运算模块5104,所述图像模糊模块5101采用高斯函数对原始图像进行处理,并得到图像二,所述图像模糊模块5101在保留裂缝特征的前提下将原始图像中的噪声去除,高斯函数的计算公式为:
[0057][0058]
式中:g(u,v)为高斯函数,(u,v)为像素点的坐标,σ为分布函数标准差;
[0059]
所述图像增强模块5102用于突出图像二的亮度特征和边缘特征,以减轻光照的影
响,并得到图像三,所述阈值分割模块5103用于区分图像三的裂缝特征和背景,并得到图像四,所述形态学运算模块5104用于对图像四中的特征区域进行扩大或者缩小,并得到图像五,裂缝提取模块5200包括图像孤立点消除模块5201和裂缝骨架提取模块5202,所述图像孤立点消除模块5201用于消除图像五中的噪声点,并得到图像六,所述图像孤立点消除模块5201的操作步骤如下:
[0060]
①
标记连通域;
[0061]
②
孤立点消除;
[0062]
③
裂缝碎片拼接;
[0063]
所述裂缝骨架提取模块5202用于对图像六的裂缝进行骨架提取,并得到图像七。
[0064]
参阅图2、图3、图4、图5、图6、图9、图10、图11、图13、图14、图15和图16,所述车体1000上设有收发天线6002,所述车体1000上设有蓄电池6003,所述车体1000的两侧对称设有两两为一组的行进轮6004,所述控制器6007无线连接有遥控器6005,所述遥控器6005上设有信号收发器6006,所述蓄电池6003与收发天线6002、图像采集摄像头6001、控制器6007、输送泵4202、横向调节电机4101、纵向调节电机4107、竖向调节电推杆4111、排气扇叶3004、预处理调节电机2105和清理驱动电机2305电性连接,所述控制器6007为stm32型号的单片机。
[0065]
实施例一,参阅图1、图2、图7、图9和图13,在使用前,使用者需要进行准备工作。
[0066]
在使用前,使用者向储水箱3001内注入液态水,并通过透明可视窗一3012时刻关注储水箱3001的液位变化,当储水箱3001内即将注满水时,使用者停止注水,同时,通过设置透明可视窗一3012,能够便于使用者在修补过程中观察储水箱3001内的液态水的剩余量,当水量不足时,使用者能够及时发现并补充液态水。
[0067]
在使用前,使用者将调配好的修补剂注入到输送泵4202内,并通过液位观察窗二4206时刻关注输送泵4202的液位变化,当输送泵4202内即将注满修补剂时,使用者不再注入修补剂,同时,通过设置液位观察窗二4206,能够便于使用者在修补过程中观察输送泵4202内的修补剂的剩余量,当修补剂不足时,使用者能够及时发现并补充修补剂。
[0068]
在使用前,使用者启动预处理调节电机2105,预处理调节电机2105带动与预处理调节电机2105的输出端同轴固接的一组预处理调节传动轮2103转动,与预处理调节电机2105的输出端同轴固接的一组预处理调节传动轮2103通过预处理调节传动带2104传动带动两组预处理调节传动轮2103同步转动,两组预处理调节传动轮2103带动两组预处理调节丝杆2102转动,从而带动与预处理调节传动轮2103呈螺纹连接设置的预处理罩体2200向下移动,使预处理罩体2200的底部与地面之间的距离缩短,进而便于在进行修补工作前预先对地面进行清理。
[0069]
实施例二,参阅图2、图3和图5,该实施例基于上述实施例,在修补过程中,通过遥控器6005远程对修补过程进行控制。
[0070]
使用者通过遥控器6005远程对修补过程进行控制,具体控制过程如下:
[0071]
遥控器6005将控制信号发送至信号收发器6006,信号收发器6006接收来自遥控器6005的控制信号,并将控制信号发送至收发天线6002,收发天线6002接收来自遥控器6005的控制信号,并将控制信号发送至控制器6007,控制器6007接收来自收发天线6002的控制信号,并对修补过程进行控制。
[0072]
实施例三,该实施例基于上述实施例,参阅图1和图2,在修补过程中,通过设置预清理组件2400预先对路面上的大颗粒的石子等杂物进行清理。
[0073]
首先,使用者将固定螺栓2403向外拧出,使固定螺栓2403不再抵紧预清理环形板2402,使预清理环形板2402由被抵紧固定状态变为可活动状态,之后,使用者沿着预清理环形嵌套板2401向下推动预清理环形板2402,直至调节到预清理环形板2402的底部靠近地面却不与地面接触的程度为止,随后使用者拧紧固定螺栓2403,使固定螺栓2403抵紧预清理环形板2402,从而使预清理环形板2402由可活动状态变为被抵紧固定状态,进而便于在修补过程中对路面上的石子等杂物进行阻挡,避免大颗粒的石子等杂物对拍照过程造成影响。
[0074]
实施例四,该实施例基于上述实施例,参阅图1、图2、图4、图5、图7、图8、图10、图12、图13、图14和图17,通过清理组件2300和雾化清洁回收组件3000对地面上的污渍和小颗粒的杂物进行清理。
[0075]
使用者启动清理驱动电机2305,清理驱动电机2305带动一级驱动传动轮2302转动,一级驱动传动轮2302通过一级驱动传动带2304传动带动一级从动传动轮2303转动,一级从动传动轮2303带动清理驱动齿轮2306转动,清理驱动齿轮2306通过齿轮传动带动清理从动齿轮2307转动,清理驱动齿轮2306和清理从动齿轮2307分别带动与清理驱动齿轮2306和清理从动齿轮2307同轴固接的两组二级传动轮2308转动,与清理驱动齿轮2306和清理从动齿轮2307同轴固接的两组二级传动轮2308通过二级传动带2309传动分别带动远离清理驱动齿轮2306和清理从动齿轮2307的两组二级传动轮2308转动,转动的二级传动轮2308带动清洁盘2310转动,清洁盘2310带动毛刷层2311转动,转动的毛刷层2311与地面的进行摩擦,从而对地面上的污渍进行清洁,避免对识别过程造成影响。
[0076]
在对地面进行清理的同时,使用者启动排气扇叶3004,并使排气扇叶3004高速转动,高速转动的排气扇叶3004将收集箱3002内的空气快速吹向排气罩3005,之后,快速流动的空气依次经过柔弹性雾化喷射管道3007内的气流进入腔3016、气流压缩腔3017和气流送出腔3018,当空气流经横截面积由粗变细的气流压缩腔3017时,空气的压强减小,而空气的流速进一步加快,并在气流送出腔3018上靠近气流压缩腔3017一端形成负压区,在负压区产生的负压吸力的作用下,储水箱3001内的液态水沿着出液管道3008进入到气流送出腔3018,液态水被快速流动的空气冲击成水雾,在空气的带动下,雾态水进入到弧形雾化喷头3006内,并最终沿着喷射孔3015喷射向地面,上述操作能够起到湿润地面的作用,避免在清理过程中出现灰尘飞扬的状况,通过喷洒雾态水能够对地面上的污渍进行软化,能够便于清理组件2300对地面上的污渍进行清理,在毛刷层2311与地面上的污渍摩擦时会产生大量的热量,当热量过高时,容易使毛刷层2311受损,需要频繁更换毛刷层2311,在本方案中,通过喷射水雾对地面进行湿润,湿润的地面能够吸收摩擦时产生的热量,避免了因热量过高而导致毛刷层2311受损的状况,延长了毛刷层2311的使用寿命,解决了需要频繁更换毛刷层2311的问题,节约了成本,同时,在高速转动的排气扇叶3004的作用下,收集箱3002内的空气被快速吸走,从而在收集罩3009产生负压吸力,使地面上的污渍、清理过程中的污水和泥灰以及裂缝中的细小杂物等被吸入到收集罩3009内,并依次经过柔弹性收集管道3011和汇集罩3010,并最终进入到收集箱3002内,在此过程中,由于过滤网板3013的存在,通过执行上述操作,能够对地面进行有效清洁,避免因地面上的污渍和小颗粒的杂物存在而对识
别过程造成不利影响。
[0077]
实施例五,该实施例基于上述实施例,参阅图4、图18、图19、图20、图21和22,在路面清理干净后,通过图像采集摄像头6001、图像预处理模块5100和裂缝提取模块5200对裂缝进行识别,使裂缝能够被完整地提取出来,从而便于修补工作顺利进行。
[0078]
首先,使用者通过图像采集摄像头6001获取原始图像,并将原始图像发送至图像模糊模块5101,图像模糊模块5101采用高斯函数对原始图像进行处理,在保留裂缝特征的前提下将原始图像中的噪声去除,从而得到图像二,图像模糊模块5101将图像二发送至图像增强模块5102,图像增强模块5102用于突出图像二的亮度特征和边缘特征,以减轻光照的影响,从而得到图像三,图像增强模块5102将图像三发送至阈值分割模块5103,阈值分割模块5103用于区分图像三的裂缝特征和背景,从而得到图像四,并将图像四发送至形态学运算模块5104,形态学运算模块5104用于对图像四中的特征区域进行扩大或者缩小,从而得到图像五,并将图像五发送至图像孤立点消除模块5201,图像孤立点消除模块5201将图像五中的噪声点消除,从而得到图像六,并将图像六发送至裂缝骨架提取模块5202,图像孤立点消除模块5201的操作步骤如下:
①
标记连通域;
②
孤立点消除;
③
裂缝碎片拼接;裂缝骨架提取模块5202对图像六的裂缝进行骨架提取,并得到图像七,通过执行上述操作,裂缝能够被完整地提取出来,从而便于修补工作顺利进行。
[0079]
实施例六,该实施例基于上述实施例,参阅图1、图2、图6、图10、图11、图15和图16,通过修补机构4000对桥梁表面的裂缝进行修补。
[0080]
使用者启动横向调节电机4101、纵向调节电机4107、竖向调节电推杆4111和输送泵4202,处于启动状态的横向调节电机4101带动与横向调节电机4101的输出端同轴固接的一组横向调节丝杆4102转动,与横向调节电机4101的输出端同轴固接的一组横向调节丝杆4102带动一组横向调节传动轮4103转动,横向调节传动轮4103通过横向调节传动带4104传动带动两组横向调节传动轮4103同步转动,从而带动两组横向调节丝杆4102同步转动,从而带动横向调节座4105沿着水平方向左右移动。
[0081]
处于启动状态的纵向调节电机4107带动与纵向调节电机4107的输出端同轴固接的一组纵向调节丝杆4106转动,与纵向调节电机4107的输出端同轴固接的一组纵向调节丝杆4106带动一组纵向调节传动轮4108转动,纵向调节传动轮4108通过纵向调节传动带4109传动带动两组纵向调节传动轮4108同步转动,从而带动两组纵向调节丝杆4106同步转动,从而带动纵向调节座4110沿着水平方向前后移动,纵向调节座4110带动竖向调节电推杆4111沿着水平方向前后移动;处于启动状态的竖向调节电推杆4111带动修补头4205沿着竖直方向上下移动;处于启动状态的输送泵4202将存储筒体4201内的修补剂送入到修补头4205内,并使修补剂沿着修补头4205进入到路面的裂缝中,以实现对桥梁地面的裂缝的修补功能。
[0082]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0083]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
[0084]
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1