一种交通锥双拨齿轮布放控制系统的制作方法
1.本实用新型属于交通锥布放技术领域,具体涉及一种交通锥双拨齿轮布放控制系统。
背景技术:
2.现在随着道路施工技术的提高,公路平坦且分道合理,车辆在公路上的速度 大大提高,交通路锥是公路上不可缺少的交通指示工具,根据交通路况的改变,要 随时对交通路锥进行收放,人工收放是传统的作业方式,人工收放的缺点是速度慢, 危险性高,放置的交通路锥间距不统一,尤其是在高速公路上作业时为了车辆安全并提高作业速度,对交通路锥的收放要求越来越高,应市场要求。
3.目前路面上也出现了一些收放交通路锥的车辆,这些车辆有的是半自动化,需要人工的助力,没有完全实现全自动化,因此亟待开发出一种可以完全实现自动化,结构简单易操作的公路交通路锥自动收放车。
技术实现要素:
4.本实用新型的目的在于提供一种交通锥双拨齿轮布放控制系统,实现快速、精准布设交通锥的功能,提高交通锥放置的自动化程度,降低人工操作的劳动强度。
5.为达到上述目的,一方面本实用新型所采用的技术方案是:
6.一种交通锥双拨齿轮布放控制系统,包括放置架和拨齿轮;两拨齿轮分别转动连接于放置架两侧;交通锥放置于所述两拨齿轮之间;交通锥的底部边缘限制于所述拨齿轮的两齿之间,驱动控制模块通过驱动所述拨齿轮转动对交通锥逐个向下拨放;所述驱动控制模块包括两组相互电性连接的伺服电机和伺服驱动器;所述两伺服驱动器之间相互电性连接控制两伺服电机同步运动;两伺服电机分别驱动两拨齿轮转动;所述伺服驱动器与控制器电性连接。
7.优选的,所述伺服电机的输出轴上用于制动拨齿轮的制动单元;所述制动单元与伺服驱动器电性连接。
8.优选的,所述制动单元为电磁制动器;所述制动单元与伺服电机集成为整体。
9.优选的,所述放置架上设有用于检测拨齿轮的位置检测传感器;所述位置检测传感器与所述控制器电性连接。
10.优选的,所述位置检测传感器的轴心与拨齿轮的轴心平行设置,所述位置检测传感器的检测面正对拨齿轮的齿端面。
11.优选的,所述控制器与人机界面电性连接;所述人机界面作用于输入操作指令和显示交通锥的布放状态。
12.与现有技术相比,本实用新型所达到的有益效果:
13.本实用新型中所述两伺服驱动器之间相互电性连接控制两伺服电机同步运动;两伺服电机分别驱动两拨齿轮转动,所述拨齿轮转动对交通锥逐个向下拨放;实现快速、精准
布设交通锥的功能,提高交通锥放置的自动化程度,降低人工操作的劳动强度。
附图说明
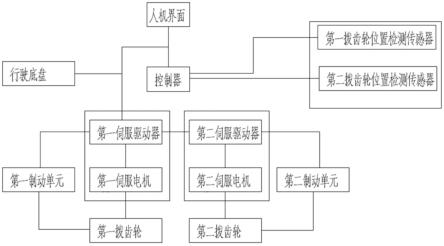
14.图1是本实用新型实施例中驱动控制模块的电路图;
15.图2是本实用新型实施例中拨齿轮与伺服电机的结构图;
16.图3是本实用新型实施例中交通锥与拨齿轮的结构图。
17.图中:1放置架、2交通锥、3拨齿轮、4a第一位置检测传感器、5a第一伺服电机、6a第一制动单元、4b第二位置检测传感器、5b第二伺服电机、6b第二制动单元。
具体实施方式
18.下面结合附图对本实用新型作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
19.需要说明的是,在本实用新型的描述中,术语“前”、“后”、“左”、“右”、“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图中所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不能理解为对本实用新型的限制。本实用新型描述中使用的术语“前”、“后”、“左”、“右”、“上”、“下”指的是附图中的方向,术语“内”、“外”分别指的是朝向或远离特定部件几何中心的方向。
20.如图1-3所示,一种交通锥双拨齿轮布放控制系统,包括放置架1和拨齿轮3;两拨齿轮3分别转动连接于放置架1两侧;交通锥2放置于所述两拨齿轮3之间;交通锥2的底部边缘限制于所述拨齿轮3的两齿之间,驱动控制模块通过驱动所述拨齿轮3转动对交通锥2逐个向下拨放;
21.所述驱动控制模块包括第一伺服电机5a、第一伺服驱动器、第二伺服电机5b和第二伺服驱动器;所述第一伺服电机5a与第一伺服驱动器电性连接,第一伺服驱动器驱动第一伺服电机5a按设定速度运转到设定的位置;所述第二伺服电机5b与第二伺服驱动器电性连接,第二伺服驱动器驱动第二伺服电机5b按设定速度运转到设定的位置;两拨齿轮3分别由第一伺服电机5a和第二伺服电机5b驱动转动。
22.所述第一伺服驱动器的位置脉冲信号输出端口连接至第二伺服驱动器的位置脉冲信号输入端口,第一伺服驱动器的数字量信号输入端口连接至第二伺服驱动器的故障信号输出端口,第二伺服驱动器的数字量输入端口连接至控制器的数字量输出端口。
23.第一伺服驱动器和第一伺服电机5a形成闭环控制,第二伺服驱动器和第二伺服电机5b形成闭环控制;控制器将位置和速度指令通过总线发送至第一伺服驱动器,第一伺服驱动器收到指令后,按指令要求驱动第一伺服电机5a带动相应的拨齿轮3运转;同时第一伺服驱动器将第一伺服电机5a的实时位置脉冲发送给第二伺服驱动器,第二伺服驱动器收到脉冲信号后,驱动第二伺服电机5b带动相应的拨齿轮同步运转,第一伺服驱动器发送给第二伺服驱动器的位置脉冲频率决定第二伺服电机5b运转速度,第一伺服驱动器发送给第二伺服驱动器的位置脉冲数量决定由第二伺服电机5b相应驱动的拨齿轮3位置,从而实现两拨齿轮3同步运转,达到交通锥2稳定拨落的效果。
24.所述第一伺服电机5a的输出轴上用于制动拨齿轮的第一制动单元6a;所述第二伺服电机5b的输出轴上用于制动拨齿轮的第二制动单元6b;所述第一制动单元6a与第一伺服
驱动器电性连接;所述第二制动单元6b与第二伺服驱动器电性连接;所述第一制动单元6a和第二制动单元6b为电磁制动器;所述第一制动单元6a与第一伺服电机5a集成为整体;所述第二制动单元6b与第二伺服电机5b集成为整体。
25.所述放置架1上设有用于检测拨齿轮的第一位置检测传感器4a和第二位置检测传感器4b;所述第一位置检测传感器4a和第二位置检测传感器4b的数字量输入端口与所述控制器电性连接;所述第一位置检测传感器4a和第二位置检测传感器4b的轴心与拨齿轮3的轴心平行设置,所述第一位置检测传感器4a和第二位置检测传感器4b的检测面正对相应的拨齿轮3的齿端面;所述控制器与人机界面电性连接;所述人机界面作用于输入操作指令和显示交通锥的布放状态。
26.工作原理:
27.在车辆行驶至交通锥布放区域,两拨齿轮3承载交通锥摞的情况下,操作人员通过人机界面下发交通锥2布放启动指令,第一制动单元6a、第二制动单元6b释放制动;车辆启动前行,开始连续布放;
28.控制器通过总线实时读取行驶底盘的速度v,并对速度v进行积分运算,得到车辆行驶距离l;
29.当车辆行驶距离l》=m时,控制器发送布放指令至第一伺服驱动器:以v1速度运转x度,并令l=0,其中m为设定的交通锥布放间距;
30.控制器通过总线发送布放指令至第一伺服驱动器:第一伺服电机5a以v1速度运转x圈,第一伺服驱动器将第一伺服电机5a的实时位置脉冲同步发送给第二伺服驱动器,第二伺服驱动器驱动第二伺服电机5b保持和第一伺服电机5a的同步运转,但旋转方向相反,从而实现将底部交通锥2从一摞交通锥中拨落至地面;
31.如此往复运行,实现交通锥的连续稳定布放;
32.布放结束后,控制器驱动第一制动单元6a抱死第一伺服电机5a,第二制动单元6b抱死第二伺服电机5b,保证第一伺服电机5a和第二伺服电机5b原点不变,下次上电后无需重新执行原点回归。
33.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1