一种移动机器人的前置机械动臂的制作方法
本技术涉及市政施工设备,具体涉及到一种移动机器人的前置机械动臂。
背景技术:
1、随着目前城市建设水平的发展,对市政道面的要求越来越高,人行道、广场等场所通常需要大面积铺设平整的路面砖和路缘石。目前,路面砖和路缘石的铺设一般采用纯人工作业或者机械和人工结合的方式,机械和人工结合的施工方法为:通过吊机将砖块用绳索吊起,然后人工控制落点位置后卸下砖块,最后进行压紧作业。这种铺设方式费时费力,铺设效果取决于施工人员的技术水平,同时工人的劳动强度大,并且需要较多的施工人员,提高了铺设成本。
2、为了提高效率,目前有一些铺砖机,但是这些铺砖机一般仅能铺设一种类型的砖块,即仅能单独铺设路面砖或者路缘石,如果既需要铺设路缘石又需要铺设路面砖,那么至少需要两台不同类型的铺砖机来分别铺设,这就使得成本较高。
3、所以急需研发一种铺路机本体上的新型机械动臂,可以实现快速与末端铺设装置拆卸,以满足不同场地的需求,在路缘石末端铺设装置或者路地砖末端铺设装置快速高效切换。
技术实现思路
1、本实用新型在此提供了一种移动机器人的前置机械动臂,所述前置机械动臂安装在铺砖移动机器人前侧用于为铺设机构提供支撑,设移动机器长度为x方向,宽度为y方向,所述机械动臂由对称安装在铺设机车架前部左右两侧的左动臂和右动臂构成,左动臂和右动臂之间通过连接杆固定相连;
2、左动臂和右动臂均包含有纵向的支腿以及水平的上臂和下臂,上臂和下臂的前端均与支腿铰接连接,其上臂与支腿的顶端铰接连接,下臂后端通过连杆支撑臂与上臂中部活动连接,上臂、下臂及前后两端铰接的支腿、连杆支撑臂构成平行四连杆机构,竖直顶升机构与上臂铰接连接,水平推送机构固定连接在连杆支撑臂上;
3、支腿底部安装有快拆安装支架,所述砖块铺设机构与快拆安装支架连接,所述快拆安装支架与支腿之间连接有一摆动缸,由摆动缸调节所述快拆安装支架的角度,在所述快拆安装支架底部安装第一支撑万向轮,在车架两侧分别安装有竖直顶升机构和水平推送机构。
4、进一步的,在车架前部左右两侧安装有竖直导轨,在竖直导轨上安装有上下滑动的垂直滑块支座,竖直顶升机构的顶杆与以及上臂的后端均铰接连接在该垂直滑块支座上。
5、进一步的,水平推送机构设有水平滑块,水平滑块与连杆支撑臂固定连接。
6、进一步的,所述快拆安装支架设有两个转轴,第一转轴通过销轴安装在支腿上,第二转轴和摆动缸的摆杆铰接连接,摆动缸带动所述快拆安装支架以销轴为轴心转动。
7、进一步的,所述快拆安装支架设有两块平行布置的三角形板,两个三角形板的三个顶点之间通过连接柱固定连接,第一连接柱与所述销轴同轴设置,另外两个第二连接柱用于和所述砖块铺设机构预留的卡口连接,第二转轴设置在其中两个连接柱之间;
8、其中一第二连接柱为光轴,另一第二连接柱为截面呈非圆形的锁紧轴,锁紧轴一端与手柄固定连接,快拆安装支架的两个卡口分别卡在第二连接柱上并转动所述手柄使所述砖块铺设机构和所述快拆安装支架锁紧固定连接。
9、进一步的,在其中一三角形板的外侧面设置有用于固定所述手柄的卡扣。
10、本实用新型的优点在于:不同类型的砖块铺设机构(路面砖铺设机构和路缘石铺设机构)可快拆的安装到机械动臂上,机械动臂一方面为砖块铺设机构提供稳定支撑,此外机械动臂可以带动砖块铺设机构进行竖直方向以及水平的前后移动,能够精确调节砖块铺设机构到达指定位置以便于铺设路面砖或者路缘石;上臂、下臂及前后两端铰接的支腿、连杆支撑臂构成的平行四连杆机构,使得支腿的水平/竖直运动更加线性。
技术特征:
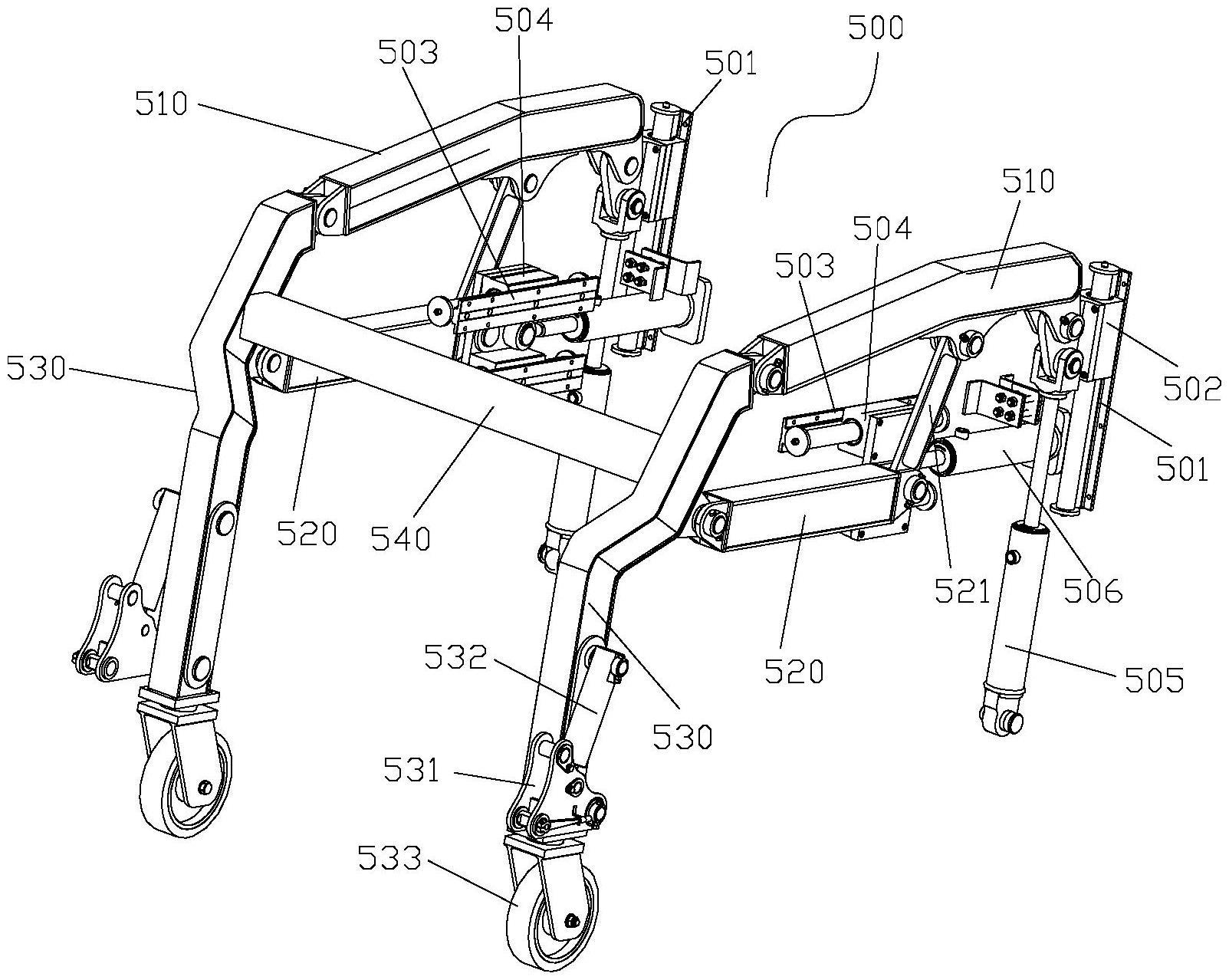
1.一种移动机器人的前置机械动臂,所述前置机械动臂安装在铺砖移动机器人前侧用于为砖块铺设机构提供支撑,设移动机器人长度为x方向,宽度为y方向,其特征在于,所述机械动臂(500)由对称安装在铺设机车架(11)前部左右两侧的左动臂和右动臂构成,左动臂和右动臂之间通过连接杆(540)固定相连;
2.根据权利要求1所述移动机器人的前置机械动臂,其特征在于,在车架(11)前部左右两侧安装有竖直导轨(501),在竖直导轨(501)上安装有上下滑动的垂直滑块支座(502),竖直顶升机构(505)的顶杆与以及上臂(510)的后端均铰接连接在该垂直滑块支座(502)上。
3.根据权利要求1所述移动机器人的前置机械动臂,其特征在于,水平推送机构(506)设有水平滑块(504),水平滑块(504)与连杆支撑臂(521)固定连接。
4.根据权利要求1所述移动机器人的前置机械动臂,其特征在于,所述快拆安装支架(531)设有两个转轴,第一转轴通过销轴(531-2)安装在支腿(530)上,第二转轴(531-6)和摆动缸(532)的摆杆铰接连接,摆动缸(532)带动所述快拆安装支架(531)以销轴(531-2)为轴心转动。
5.根据权利要求4所述移动机器人的前置机械动臂,其特征在于,所述快拆安装支架(531)设有两块平行布置的三角形板(531-1),两个三角形板(531-1)的三个顶点之间通过连接柱固定连接,第一连接柱与所述销轴(531-2)同轴设置,另外两个第二连接柱(531-7)用于和所述砖块铺设机构预留的卡口连接,第二转轴(531-6)设置在其中两个连接柱之间;
6.根据权利要求5所述移动机器人的前置机械动臂,其特征在于,在其中一三角形板的外侧面设置有用于固定所述手柄(531-4)的卡扣(531-5)。
技术总结
本技术提供了一种移动机器人的前置机械动臂,由对称安装在铺设机车架前部左右两侧的左动臂和右动臂构成;左动臂和右动臂均包含有纵向的支腿以及水平的上臂和下臂,上臂和下臂的前端均与支腿铰接连接,其上臂与支腿的顶端铰接连接,下臂后端通过连杆支撑臂与上臂中部活动连接,上臂、下臂及前后两端铰接的支腿、连杆支撑臂构成平行四连杆机构,竖直顶升机构与上臂铰接连接,水平推送机构固定连接在连杆支撑臂上;支腿底部安装有快拆安装支架,铺设机构与快拆安装支架连接,快拆安装支架与支腿之间连接有一摆动缸,由摆动缸调节快拆安装支架的角度。本技术的前置机械动臂可以为移动机器人前侧的铺设机构提供稳定的支撑。
技术研发人员:范永豪,高峰,黄川,雷震,何社利,程飞飞
受保护的技术使用者:苏州博坦机器人有限公司
技术研发日:20220927
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!