一种基于数字孪生的桥梁预制构件及快速吊装方法与流程
本发明涉及桥梁施工,具体是一种基于数字孪生的桥梁预制构件及快速吊装方法。
背景技术:
1、装配式桥梁在施工时通过吊装的方式完成预制构件的拼装。由于混凝土预制构件体积、质量较大,导致其吊装难度较大。在吊装施工的过程中需要实时监测吊装构件的坐标来判断构件在三维空间的位置,从而计算吊车每次起吊、旋转操作量,以保证构件位置没有出现偏差。尤其是在枢纽互通等空间结构复杂的结构物吊装施工过程中,由于施工的环境复杂,吊装施工空间受限,施工过程中极易与既有结构建筑物产生碰撞,很难实现一次吊装成功。从而影响施工的进度和效率。
2、当前在预制梁构件吊装施工过程中,混凝土构件的吊装监测主要是以技术人员采用全站仪等设备进行坐标采集计算,监测效率较低,施工进度慢。且吊装操作主要是人工控制吊车完成,在施工过程中难以避免人为误差的影响,不仅精度较差,而且在施工条件受限的情况下极易导致事故的发生。
技术实现思路
1、本发明的目的在于提供一种基于数字孪生的桥梁预制构件及快速吊装方法,以解决上述提出精准度不足与效率低下问题。
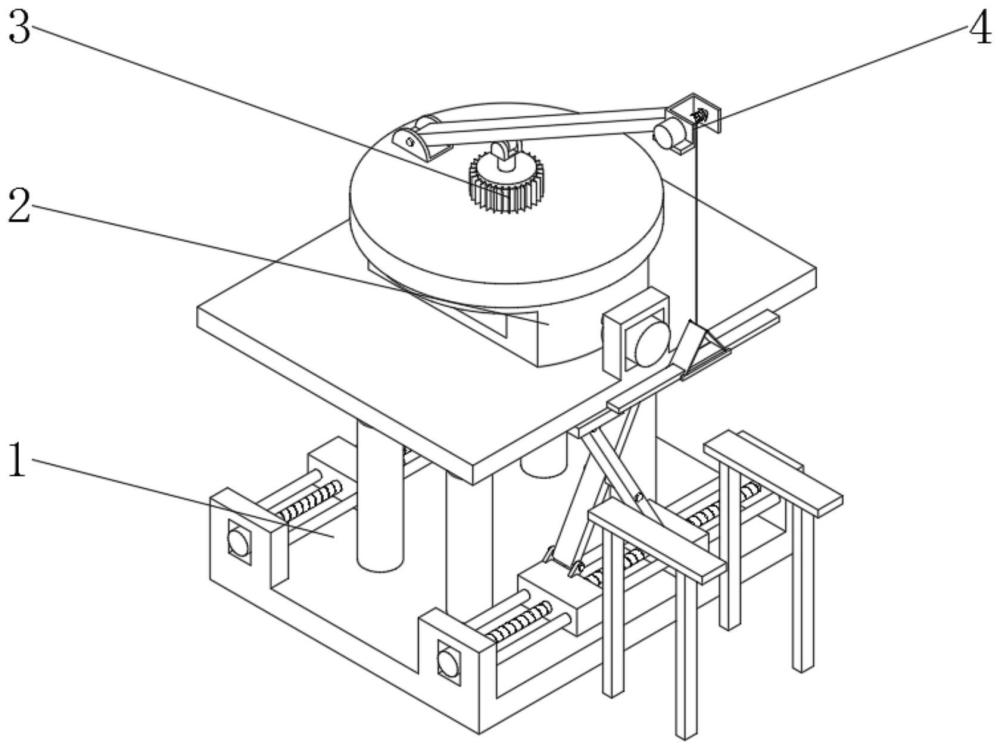
2、为实现上述目的,本发明提供如下技术方案:一种基于数字孪生的桥梁预制构件,包括升降机构、旋转机构、角度调节机构与吊装机构,
3、升降机构:所述升降机构包括剪刀叉组结构,所述剪刀叉组结构的顶部设置有升降板,所述剪刀叉组结构与升降板之间固定连接有伸缩杆,所述伸缩杆为多组矩阵阵列分布;
4、旋转机构:所述旋转机构包括旋转座,所述旋转座的顶部转动连接有圆盘;
5、角度调节机构:所述角度调节机构包括限位座,所述限位座的内腔中转动连接有旋转杆;
6、吊装机构:所述吊装机构包括工作框,所述工作框的内腔中转动连接有转动辊,所述转动辊的外圈套装有钢绳,所述钢绳的底部固定连接有升降带。
7、优选的,所述剪刀叉组结构包括底板,所述底板的顶部固定连接有第一电机,所述底板的顶部固定连接有连接座,所述第一电机与连接座之间转动连接有双向丝杆且第一电机的输出轴与双向丝杆之间通过联轴器固定连接,所述双向丝杆的外圈螺纹连接有第一移动块,所述第一移动块的顶部铰接有连接板,所述连接板的顶部铰接有第二移动块,所述第二移动块的顶部与升降板的底部为滑动连接,所述第二移动块的顶部设置有第二滚轮,所述升降板的底部开设有第二滚轮槽,所述第二滚轮设置在第二滚轮槽的内腔中。
8、通过上述技术方案可知,启动第一电机,带动双向丝杆进行转动。当双向丝杆转动的过程中,会带动双向丝杆两端的第一移动块相互靠近,从而带动铰接的连接板相互靠近,进而使得第二移动块的位置也会相互靠近并升高位置。第二移动块位置升高后,使得顶部支撑的升降板位置升高,实现吊装位置高度的变化。
9、优选的,所述第一电机与连接座之间固定连接有限位杆,所述第一移动块套装在限位杆的外圈且可前后方向移动。
10、优选的,所述圆盘的底部固定连接有第一转轴,所述第一转轴的底部延伸至旋转座的内腔中,所述第一转轴的底部固定连接有第一锥齿轮。
11、优选的,所述升降板顶部的右侧固定连接有第二电机,所述第二电机输出轴的一侧固定连接有第二转轴,所述第二电机的输出轴与第二转轴之间通过联轴器固定连接,所述第二转轴的一侧固定连接有第二锥齿轮,所述第二锥齿轮与第一锥齿轮相互啮合。
12、优选的,所述旋转座的顶部开设有限位槽,所述圆盘的底部固定连接有限位块,所述限位块滑动连接在限位槽的内腔中。
13、通过上述技术方案可知,启动第二电机,带动转轴与第二锥齿轮进行转动,从而带动啮合的第一锥齿轮进行转动。第一锥齿轮的转动会带动第一转轴与圆盘进行转动,而圆盘的底部固定连接有限位块,限位块可在限位槽的内腔中滑动,从而会限制圆盘角度的变化,实现吊装位置的角度变化。
14、优选的,所述旋转杆的底部开设有第一滚轮槽,所述圆盘的顶部固定连接有电动推杆,所述电动推杆的顶部固定连接有第一滚轮,所述第一滚轮设置在第一滚轮槽的内腔中,所述限位座与旋转杆之间通过销轴转动连接。
15、通过上述技术方案可知,启动电动推杆,带动第一滚轮在第一滚轮槽的内腔中进行滚动,且旋转杆与限位座之间通过销轴转动连接,因此使得旋转杆进行角度的变化,实现吊装倾斜角度的改变。
16、优选的,所述工作框的正面固定连接有第三电机,所述第三电机的输出轴与转动辊之间设置有联轴器固定连接。
17、通过上述技术方案可知,启动第三电机,带动转动辊进行转动,实现外圈钢绳的松卸,实现对底部升降带与横梁的吊装,满足对桥梁主体的预制。
18、优选的,所述升降带的内腔设置有横梁,所述升降带的底部设置有桥梁主体。
19、作为本发明进一步的方案:一种基于数字孪生的桥梁预制构件的快速吊装方法,包括以下步骤:
20、ss001、建模,创建高精度桥梁bim模型,基于三维激光扫描技术,针对施工现场预制梁创建高精度点云模型;
21、ss002、模型转换,将点云模型转换为施工场景中的数字孪生模型,并在三维场景中进行吊装过程计算;
22、ss003、吊装,基于物联网技术由计算机对数控装置建立远程连接,数控装置进行自动吊装,对预制梁构件重新进行扫描、计算,对其进行角度微调,随后重复上述步骤,检测构件的坐标、标高是否满足要求。
23、与现有技术相比,本发明的有益效果是:
24、1、本发明中,基于施工图建立高精度桥梁bim模型,通过模型的融合,将预制构件的真实几何形态展示在三维bim场景中,实现了对构件的坐标、几何尺寸等要素进行自动测量,避免了人工测量效率低、误差概率大的情况。
25、2、本发明中,基于三维施工场景模型,进行构件吊装路径的规划和吊装过程的计算,从而制定出最优的吊装方案,保证吊装过程的快速、精准。尤其是施工环境复杂,空间有限的情况下,通过路径规划避免了吊装施工过程中可能发生的碰撞冲突,降低了施工的风险。
26、3、本发明中,基于物联网技术通过计算机控制数控吊车进行构件的吊装施工,能够保证吊装过程符合计算结果,最大程度避免了因为人为操作导致的误差,提高了吊装施工的效率。
技术特征:
1.一种基于数字孪生的桥梁预制构件,包括升降机构(1)、旋转机构(2)、角度调节机构(3)与吊装机构(4),其特征在于:
2.根据权利要求1所述的一种基于数字孪生的桥梁预制构件,其特征在于:所述剪刀叉组结构(101)包括底板(104),所述底板(104)的顶部固定连接有第一电机(105),所述底板(104)的顶部固定连接有连接座(106),所述第一电机(105)与连接座(106)之间转动连接有双向丝杆(107)且第一电机(105)的输出轴与双向丝杆(107)之间通过联轴器固定连接,所述双向丝杆(107)的外圈螺纹连接有第一移动块(108),所述第一移动块(108)的顶部铰接有连接板(109),所述连接板(109)的顶部铰接有第二移动块(110),所述第二移动块(110)的顶部与升降板(102)的底部为滑动连接,所述第二移动块(110)的顶部设置有第二滚轮(111),所述升降板(102)的底部开设有第二滚轮槽(112),所述第二滚轮(111)设置在第二滚轮槽(112)的内腔中。
3.根据权利要求2所述的一种基于数字孪生的桥梁预制构件,其特征在于:所述第一电机(105)与连接座(106)之间固定连接有限位杆(113),所述第一移动块(108)套装在限位杆(113)的外圈且可前后方向移动。
4.根据权利要求1所述的一种基于数字孪生的桥梁预制构件,其特征在于:所述圆盘(202)的底部固定连接有第一转轴(203),所述第一转轴(203)的底部延伸至旋转座(201)的内腔中,所述第一转轴(203)的底部固定连接有第一锥齿轮(204)。
5.根据权利要求1所述的一种基于数字孪生的桥梁预制构件,其特征在于:所述升降板(102)顶部的右侧固定连接有第二电机(205),所述第二电机(205)输出轴的一侧固定连接有第二转轴(206),所述第二电机(205)的输出轴与第二转轴(206)之间通过联轴器固定连接,所述第二转轴(206)的一侧固定连接有第二锥齿轮(207),所述第二锥齿轮(207)与第一锥齿轮(204)相互啮合。
6.根据权利要求1所述的一种基于数字孪生的桥梁预制构件,其特征在于:所述旋转座(201)的顶部开设有限位槽(208),所述圆盘(202)的底部固定连接有限位块(209),所述限位块(209)滑动连接在限位槽(208)的内腔中。
7.根据权利要求1所述的一种基于数字孪生的桥梁预制构件,其特征在于:所述旋转杆(302)的底部开设有第一滚轮槽(303),所述圆盘(202)的顶部固定连接有电动推杆(304),所述电动推杆(304)的顶部固定连接有第一滚轮(305),所述第一滚轮(305)设置在第一滚轮槽(303)的内腔中,所述限位座(301)与旋转杆(302)之间通过销轴转动连接。
8.根据权利要求1所述的一种基于数字孪生的桥梁预制构件,其特征在于:所述工作框(401)的正面固定连接有第三电机(405),所述第三电机(405)的输出轴与转动辊(402)之间设置有联轴器固定连接。
9.根据权利要求1所述的一种基于数字孪生的桥梁预制构件,其特征在于:所述升降带(404)的内腔设置有横梁(406),所述升降带(404)的底部设置有桥梁主体(407)。
10.根据权利要求1-9任意一所述的一种基于数字孪生的桥梁预制构件的快速吊装方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种基于数字孪生的桥梁预制构件,包括升降机构、旋转机构、角度调节机构与吊装机构,升降机构:升降机构包括剪刀叉组结构,剪刀叉组结构的顶部设置有升降板,剪刀叉组结构与升降板之间固定连接有伸缩杆,伸缩杆为多组矩阵阵列分布;旋转机构:旋转机构包括旋转座,旋转座的顶部转动连接有圆盘;角度调节机构:角度调节机构包括限位座,限位座的内腔中转动连接有旋转杆。本发明中,基于施工图建立高精度桥梁BIM模型,通过模型的融合,将预制构件的真实几何形态展示在三维BIM场景中,实现了对构件的坐标、几何尺寸等要素进行自动测量,避免了人工测量效率低、误差概率大的情况。
技术研发人员:贺红星,夏瑜,邓运生,程飞,向博乐,田浩,李佳鹏,向隆杰,方明镜,聂良涛,张凯,周钦
受保护的技术使用者:中建三局集团长江有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!