市政工程箱涵的自动化快速移动模架的制作方法
本技术涉及移动模架,具体为一种市政工程箱涵的自动化快速移动模架。
背景技术:
1、在市政工程小型箱涵混凝土浇筑过程中,常规施工是先施工箱涵底板,在箱涵底板上搭设箱涵模架体系,在该体系上浇筑混凝土箱涵的两立墙和顶板,当浇筑的混凝土达到拆模条件后,拆除两立墙和顶板模板后,接续进行下段箱涵的模板体系的搭设,如此反复,完成整个箱涵的混凝土构筑;由于小型箱涵内部空间有限,两立墙内侧模架及顶板模板在拆除时存在费时费力的问题,而且还存在一定的安全隐患。
2、对此,经检索,cn215104805u公开了一种超长小型箱涵混凝土浇筑模板的移动式模架,在箱型支撑框架的底端横梁上设置有箱型支撑框架行走轮支架,箱型支撑框架行走轮活动设置在槽钢轨道中,在箱型支撑框架的上顶面上设置有顶端顶丝,在顶端顶丝的上端顶接有箱涵顶板浇筑模板,在箱型支撑框架的左侧面上设置有左侧顶丝,左侧顶丝的左端顶接有左侧立墙内侧模板,在箱型支撑框架的右侧面上设置有右侧顶丝,右侧顶丝的右端顶接有右侧立墙内侧模板,实现了一次搭设即可完成整体箱涵内侧模板的施工。
3、上述专利公开的一种超长小型箱涵混凝土浇筑模板的移动式模架,在利用行走轮移动至箱涵底板上后,通过分别转动多个顶端顶丝、左侧顶丝和右侧顶丝实现对箱涵内侧模板挤紧支撑,但是存在以下不足:
4、1、在内侧进行支撑工作时,需要人员逐个对多个顶端顶丝、左侧顶丝和右侧顶丝转动调整,操作繁琐,费时费力,使用后也需要进行人工解锁操作,工作效率低,鉴于此,我们提出了市政工程箱涵的自动化快速移动模架,用于解决上述问题。
技术实现思路
1、本实用新型的目的在于提供市政工程箱涵的自动化快速移动模架,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:市政工程箱涵的自动化快速移动模架,包括与箱涵底板和箱涵内模板相配合的自动化快速移动模架本体,所述自动化快速移动模架本体包括回形模架,所述回形模架的底部呈矩形转动安装有四个行走轮,所述回形模架的顶部内壁和两侧内壁之间固定连接有t形支架;
3、所述回形模架的下方设有活动套设在四个行走轮上的支板,回形模架的顶部、右侧和支板的底部均固定连接有多个第一顶块,t形支架的底部内壁上固定安装有plc控制器,回形模架的底部内壁上开设有矩形穿孔,支板的顶部和矩形穿孔的左侧内壁之间安装有与plc控制器电性连接的测距升降驱动组件,测距升降驱动组件的顶端与t形支架的底部固定连接,测距升降驱动组件用于通过t形支架驱动回形模架上移和测量上移距离,并将测量的上移距离传递给plc控制器,用于在达到预设距离时受控于plc控制器自动关闭,利用回形模架的上移实现驱动行走轮上移离地和驱动上部的第一顶块对箱涵内模板支撑;
4、所述t形支架的底部内壁上固定安装有与plc控制器电性连接的控压横撑驱动组件,控压横撑驱动组件的左侧延伸至回形模架外并固定连接有多个第二顶块,控压横撑驱动组件用于受控于plc控制器驱动第二顶块对箱涵内模板左侧内壁自动控压支撑。
5、优选地,所述测距升降驱动组件包括固定安装在支板顶部的第一电动推杆,所述第一电动推杆的输出轴顶端与t形支架的底部固定连接,矩形穿孔的左侧内壁上固定安装有激光测距传感器,支板的顶部嵌装固定有反射片,反射片位于激光测距传感器的下方并与激光测距传感器相配合,激光测距传感器和第一电动推杆均与plc控制器电性连接;设置的第一电动推杆、激光测距传感器和反射片配合,在第一电动推杆正向启动驱动t形支架上移时,t形支架带动回形模架上移,回形模架带动行走轮上移离地解除行走状态,并带动上部的第一顶块向上对箱涵内模板支撑,回形模架上移时还带动激光测距传感器上移,激光测距传感器测量与反射片之间产生的上移距离并传递给plc控制器距离值,达到预设顶升支撑距离时,plc控制器控制第一电动推杆自动关闭,实现对箱涵内模板竖向自动控距顶升支撑。
6、优选地,所述控压横撑驱动组件包括固定安装在t形支架底部内壁上的第二电动推杆,所述第二电动推杆的输出轴左端固定连接有压力传感器,压力传感器的左侧延伸至回形模架外并固定连接有移动板,移动板的右侧呈矩形固定连接有四个横导杆,回形模架滑动套设在四个横导杆上,移动板的左侧与多个第二顶块的右侧固定连接,压力传感器和第二电动推杆均与plc控制器电性连接;设置的第二电动推杆、压力传感器、移动板和横导杆配合,在第二电动推杆正向启动驱动压力传感器左移时,压力传感器带动移动板左移,移动板带动多个第二顶块左移至与箱涵内模板的左侧内壁接触时,被其遮挡限制,此时继续启动的第二电动推杆对压力传感器挤压,压力传感器检测挤压力并传递给plc控制器压力值,达到预设压力值时,plc控制器控制第二电动推杆自动关闭,实现对箱涵内模板横向自动控压支撑。
7、优选地,所述支板的顶部呈矩形固定连接有四个t形导杆,回形模架的底部内壁上开设有四个分别与对应的t形导杆外侧滑动套装的竖导孔。
8、优选地,所述t形支架的底部内壁上固定安装有蓄电池,第一电动推杆、第二电动推杆、plc控制器和激光测距传感器均与蓄电池电性连接,所述第一电动推杆和第二电动推杆的后侧均固定并电性连接有无线遥控开关,且两个无线遥控开关匹配设置有同一个外部遥控器。
9、优选地,所述回形模架的左侧内壁上开设有矩形通孔,压力传感器位于矩形通孔内并与矩形通孔的内壁不接触。
10、优选地,所述支板的顶部开设有四个圆穿孔,行走轮位于对应的圆穿孔内并与圆穿孔的内壁不接触,行走轮的底部位置比下方的第一顶块的底部位置低。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本市政工程箱涵的自动化快速移动模架,通过设置的回形模架、第一顶块、支板、行走轮、plc控制器和测距升降驱动组件,通过四个行走轮方便在支撑前对本装置进行灵活移动,在根据竖向顶升支撑高度需求利用plc控制器预设置控制第一电动推杆的关闭距离值后,正向启动第一电动推杆时能够对箱涵内模板竖向自动控距顶升支撑,且能够在反向启动第一电动推杆时自动解除竖向支撑状态;
13、2、本市政工程箱涵的自动化快速移动模架,通过设置的回形模架、第一顶块、plc控制器、控压横撑驱动组件和第二顶块配合,在根据横向支撑力度需求利用plc控制器预设置控制第二电动推杆的关闭压力值后,正向启动第二电动推杆时能够对箱涵内模板内侧横向自动控压支撑,且能够在反向启动第二电动推杆时自动解除横向支撑状态,无需人工手动多处调整,操作简便,省时省力,提高操作自动化程度和工作效率。
14、本实用新型通过设置有一系列结构,便于通过四个行走轮在支撑前进行灵活移动,便于对箱涵内模板竖向自动控距顶升支撑,且便于对箱涵内模板横向自动控压支撑,通过竖向自动控距支撑和横向自动控压支撑配合,实现自动快速对箱涵内模板稳定支撑的效果,无需人工手动多处调整,操作简便,省时省力,提高操作自动化程度和工作效率,且便于在使用后快速自动解除支撑状态。
技术特征:
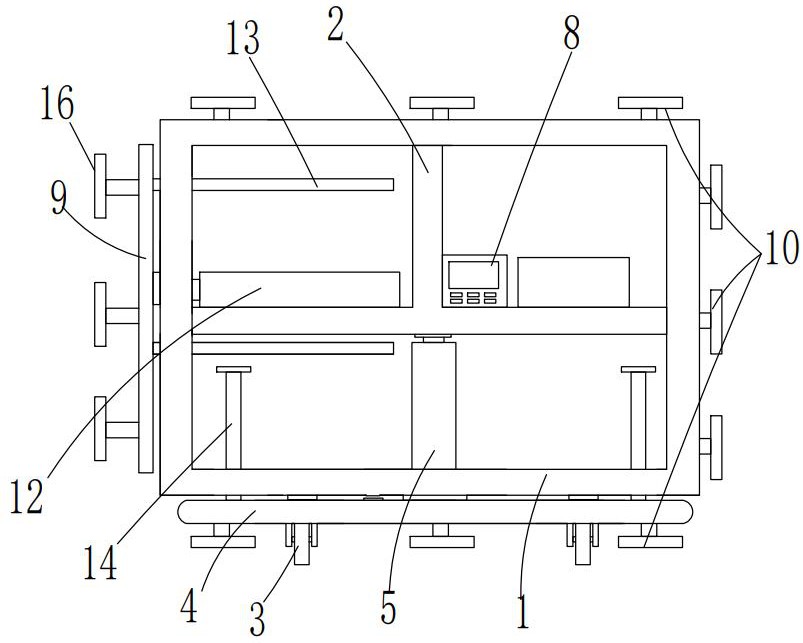
1.市政工程箱涵的自动化快速移动模架,包括与箱涵底板(200)和箱涵内模板(100)相配合的自动化快速移动模架本体,其特征在于:所述自动化快速移动模架本体包括回形模架(1),所述回形模架(1)的底部呈矩形转动安装有四个行走轮(3),所述回形模架(1)的顶部内壁和两侧内壁之间固定连接有t形支架(2);
2.根据权利要求1所述的市政工程箱涵的自动化快速移动模架,其特征在于:所述测距升降驱动组件包括固定安装在支板(4)顶部的第一电动推杆(5),所述第一电动推杆(5)的输出轴顶端与t形支架(2)的底部固定连接,矩形穿孔(15)的左侧内壁上固定安装有激光测距传感器(6),支板(4)的顶部嵌装固定有反射片(7),反射片(7)位于激光测距传感器(6)的下方并与激光测距传感器(6)相配合,激光测距传感器(6)和第一电动推杆(5)均与plc控制器(8)电性连接。
3.根据权利要求2所述的市政工程箱涵的自动化快速移动模架,其特征在于:所述控压横撑驱动组件包括固定安装在t形支架(2)底部内壁上的第二电动推杆(12),所述第二电动推杆(12)的输出轴左端固定连接有压力传感器(11),压力传感器(11)的左侧延伸至回形模架(1)外并固定连接有移动板(9),移动板(9)的右侧呈矩形固定连接有四个横导杆(13),回形模架(1)滑动套设在四个横导杆(13)上,移动板(9)的左侧与多个第二顶块(16)的右侧固定连接,压力传感器(11)和第二电动推杆(12)均与plc控制器(8)电性连接。
4.根据权利要求1所述的市政工程箱涵的自动化快速移动模架,其特征在于:所述支板(4)的顶部呈矩形固定连接有四个t形导杆(14),回形模架(1)的底部内壁上开设有四个分别与对应的t形导杆(14)外侧滑动套装的竖导孔。
5.根据权利要求3所述的市政工程箱涵的自动化快速移动模架,其特征在于:所述t形支架(2)的底部内壁上固定安装有蓄电池,第一电动推杆(5)、第二电动推杆(12)、plc控制器(8)和激光测距传感器(6)均与蓄电池电性连接,所述第一电动推杆(5)和第二电动推杆(12)的后侧均固定并电性连接有无线遥控开关,且两个无线遥控开关匹配设置有同一个外部遥控器。
6.根据权利要求3所述的市政工程箱涵的自动化快速移动模架,其特征在于:所述回形模架(1)的左侧内壁上开设有矩形通孔,压力传感器(11)位于矩形通孔内并与矩形通孔的内壁不接触。
7.根据权利要求1所述的市政工程箱涵的自动化快速移动模架,其特征在于:所述支板(4)的顶部开设有四个圆穿孔,行走轮(3)位于对应的圆穿孔内并与圆穿孔的内壁不接触,行走轮(3)的底部位置比下方的第一顶块(10)的底部位置低。
技术总结
本技术公开了一种市政工程箱涵的自动化快速移动模架,包括与箱涵底板和箱涵内模板相配合的自动化快速移动模架本体,所述自动化快速移动模架本体包括回形模架,所述回形模架的底部呈矩形转动安装有四个行走轮,所述回形模架的顶部内壁和两侧内壁之间固定连接有T形支架。本技术通过设置有一系列结构,便于通过四个行走轮在支撑前进行灵活移动,便于对箱涵内模板竖向自动控距顶升支撑,且便于对箱涵内模板横向自动控压支撑,通过竖向自动控距支撑和横向自动控压支撑配合,实现自动快速对箱涵内模板稳定支撑的效果,无需人工手动多处调整,操作简便,省时省力,提高操作自动化程度和工作效率,且便于在使用后快速自动解除支撑状态。
技术研发人员:谢愈,高健,吴梅林,荀俊杰,李祖金,王伟颀
受保护的技术使用者:苏州吴林园林发展有限公司
技术研发日:20231031
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!