一种服务型机器人底盘防碰撞结构的制作方法
1.本发明属于机器人技术领域,特别涉及一种服务型机器人底盘防碰撞结构。
背景技术:
2.服务型机器人在行走中通常会用到激光、视觉等导航技术,但是目前技术条件下,已有导航技术仍不能实现完全的避障,经常会出现机器人未能及时制动从而导致剐蹭和碰撞,对机器人的结构和功能造成很大影响。因此,需要在机器人底盘处增加防碰撞装置,作为机器人紧急情况下的最后一道屏障。市场已有产品中,多数机器人的防碰撞结构有碰撞角度不准确、碰撞后不易触发以及不能全向防碰撞等诸多问题。因此,服务型机器人的防碰撞问题亟待解决。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种服务型机器人底盘防碰撞结构,使得机器人在行走时能够全向防碰撞,且易于触发,角度准确。
4.为了实现上述目的,本发明采用以下技术方案:
5.一种服务型机器人底盘防碰撞结构,包括外壳本体、防碰壳ⅰ、防碰壳ⅱ及微动开关,其中防碰壳ⅰ和防碰壳ⅱ沿周向交替设置于所述外壳本体的底部;并且,所述防碰壳ⅰ和所述防碰壳ⅱ具有向内转动的自由度,所述微动开关设置于所述外壳本体上;当所述防碰壳ⅰ或所述防碰壳ⅱ遇到障碍物时向内转动时,会触发所述微动开关。
6.所述外壳本体上沿周向设有多个安装台,所述防碰壳ⅰ和所述防碰壳ⅱ通过连接销分别与相对应的安装台可转动地连接。
7.所述连接销上设有扭簧,所述扭簧的一端与所述安装台连接,另一端与所述防碰壳ⅰ或所述防碰壳ⅱ的内壁抵接,从而产生向外的预紧力。
8.所述微动开关安装在与所述防碰壳ⅰ连接的所述安装台上。
9.所述安装台的上端与所述外壳本体的内壁连接,并且设有用于与所述连接销连接销孔,所述安装台的下端设有用于安装所述微动开关的微动开关安装孔。
10.所述外壳本体位于所述防碰壳ⅰ和所述防碰壳ⅱ的外侧,并且所述外壳本体的下端部与所述防碰壳ⅰ和所述防碰壳ⅱ的上端部重叠,从而限制所述防碰壳ⅰ和所述防碰壳ⅱ向外张开。
11.所述防碰壳ⅱ的两端和相邻的两个所述防碰壳ⅰ的端部相互叠置,并且所述防碰壳ⅱ位于所述防碰壳ⅰ的外侧,所述防碰壳ⅱ向内转动会推动相邻两个所述防碰壳ⅰ也向内转动。
12.所述防碰壳ⅰ的两端设有向内凸起的按压部,所述防碰壳ⅱ的两端与相对应的所述按压部重叠,从而使所述防碰壳ⅱ和所述防碰壳ⅰ的外圆周在同一圆周上。
13.所述防碰壳ⅰ的内侧壁上设有用于与所述安装台连接的连接座ⅰ。
14.所述防碰壳ⅱ的内壁上设有用于与所述安装台连接的连接座ⅱ。
15.本发明的优点及有益效果是:
16.1.本发明的机器人能够全方位的检测碰撞,且能够精准的定位碰撞角度。
17.2.本发明利用扭簧将每片防碰撞壳安装到本体外壳,增加多个微动开关,能够更加容易的触发。
18.3.本发明结构简单易于实现,且整体布局紧凑不会露出内部结构。
附图说明
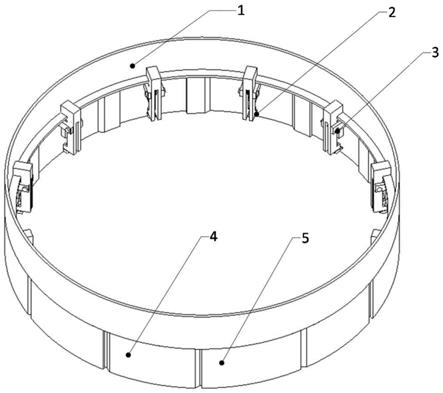
19.图1为本发明服务型机器人底盘防碰撞结构的轴测图;
20.图2为本发明服务型机器人底盘防碰撞结构的俯视图;
21.图3为图2的a-a剖视图;
22.图4为图3中i处放大图;
23.图5为本发明中外壳本体的结构示意图;
24.图6为本发明中防碰壳ⅰ的结构示意图;
25.图7为本发明中防碰壳ⅱ的结构示意图;
26.图8为本发明中微动开关的安装示意图;
27.图9为本发明的工作原理示意图。
28.图中:1为外壳本体,1-1为安装台,1-2为销孔,1-3为微动开关安装孔,2为微动开关,3为连接销,4为防碰壳ⅰ,4-1为连接座ⅰ,4-2为按压部,5为防碰壳ⅱ,5-1为连接座ⅱ,6为扭簧。
具体实施方式
29.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
30.如图1-4所示,本发明提供的一种服务型机器人底盘防碰撞结构,包括外壳本体1、防碰壳ⅰ4、防碰壳ⅱ5及微动开关2,其中防碰壳ⅰ4和防碰壳ⅱ5沿周向交替设置于外壳本体1的底部;并且,防碰壳ⅰ4和防碰壳ⅱ5具有向内转动的自由度,微动开关2设置于外壳本体1上;当防碰壳ⅰ4或防碰壳ⅱ5遇到障碍物时向内转动时,会触发微动开关2。
31.如图5所示,外壳本体1上沿周向设有多个安装台1-1,防碰壳ⅰ4和防碰壳ⅱ5通过连接销3分别与相对应的安装台1-1可转动地连接。
32.进一步地,安装台1-1的上端与外壳本体1的内壁连接,并且设有用于与连接销3连接销孔1-2,安装台1-1的下端设有用于安装微动开关2的微动开关安装孔1-3。如图8所示,安装微动开关2容置于安装台1-1下端的凹槽内,并且通过螺栓与微动开关安装孔1-3连接。
33.本发明的实施例中,微动开关2安装在与防碰壳ⅰ4连接的安装台1-1上。
34.如图4所示,连接销3上设有扭簧6,扭簧6的一端与安装台1-1连接,另一端与防碰壳ⅰ4或防碰壳ⅱ5的内壁抵接,从而产生向外的预紧力。
35.如图1所示,外壳本体1位于防碰壳ⅰ4和防碰壳ⅱ5的外侧,并且外壳本体1的下端部与防碰壳ⅰ4和防碰壳ⅱ5的上端部重叠,防碰壳ⅰ4和防碰壳ⅱ5通过扭簧6压紧在外壳本体1上,从而限制防碰壳ⅰ4和防碰壳ⅱ5向外张开。
36.如图4、图9所示,防碰壳ⅱ5的两端和相邻的两个防碰壳ⅰ4的端部相互叠置,并且
防碰壳ⅱ5位于防碰壳ⅰ4的外侧,即一个防碰壳ⅱ5同时按压两个防碰壳ⅰ4的边缘,防碰壳ⅱ5向内转动会推动两侧的防碰壳ⅰ4也向内转动。
37.进一步地,如图6、图9所示,防碰壳ⅰ4的两端设有向内凸起的按压部4-2,防碰壳ⅱ5的两端与相对应的按压部4-2重叠,从而使防碰壳ⅱ5和防碰壳ⅰ4的外圆周在同一圆周上。
38.如图6、图7所示,防碰壳ⅰ4的内侧壁上设有用于与安装台1-1连接的连接座ⅰ4-1;防碰壳ⅱ5的内壁上设有用于与安装台1-1连接的连接座ⅱ5-1。
39.本发明的工作原理是:
40.图1、图9所示,机器人行走时遇到障碍物,当障碍物处于图9所示的实心箭头所示方向时,障碍物碰撞防碰壳ⅰ4,防碰壳ⅰ4沿连接销3向内运动,从而触碰微动开关2,微动开关2会给出有障碍物及障碍物所在角度两个信息供机器人进行分析和处理;当障碍物处于图9所示的空心箭头所示方向时,障碍物碰撞防碰壳ⅱ5,防碰壳ⅱ5受到碰撞会挤压相邻的两个防碰壳ⅰ4,因此相邻的两个微动开关2也会被同时触发,这时会提供给机器人前方有障碍物且障碍物处于哪两个防碰壳ⅰ4之间的角度信息,机器人根据信息进行下一步分析及动作。由图9所示的排布方式,在机器人的外壳本体1上一周安装微动开关2,使得机器人具备全向的障碍物检测能力,达到防碰撞效果。
41.本发明利用防碰撞外壳受到碰撞后会挤压外壳本体上的微动开关,能够全方位的检测碰撞,且能够精准的定位碰撞角度,使机器人能够进行制动,进而根据前方障碍物做出调整。本发明结构简单易于实现,且整体布局紧凑不会露出内部结构。
42.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1