一种机器人远程操控系统的制作方法
[0001]
本发明专利涉及一种机器人远程操控系统。
背景技术:
[0002]
当前,国内一些单位在机器人远程操作与控制方面也进行了相关研究。2000年,哈尔滨工业大学完成了一项通过网络遥控指挥机器人工作的项目,它主要借助远程机器人的传感器信息,使远程操作人员真切感受到现场的感觉,并且可以完成物体的抓取、搬运等工作。2005年12月,北京海军总医院通过互联网遥控在延安一家医院的机器人进行脑外科手术,并取得了较好的效果。2009年10月,中国“大洋一号”科考船使用“海龙2号”水下机器人的机械臂准确地抓获约7公斤硫化物样品。在2010年于上海举行的世博会上,在“海宝家园”里值班的技术人员们可以通过3g无线技术对海宝机器人进行远程操控。这些机器人可以为游客提供世博信息、并能准确辨识来宾的方位、人数和行进方向等。
技术实现要素:
[0003]
本发明专利的目的在于克服现有技术的不足与缺点,提供一种机器人远程操控系统,可以极大地降低工业机器人操作控制的实现难度、开发成本、维护成本。
[0004]
为实现上述目的,本发明专利所提供的技术方案为:一种机器人远程操控系统,所述一种机器人远程操控系统采用客户端/服务器端架构即c/s架构,并配置有一操作手柄作为其输入装置,操作者通过该操作手柄发出控制工业机器人及其机械臂工作,所述c/s架构由客户端主机和服务器端主机组成,所述客户端主机通过传输接口与操作手柄连接,所述服务器端主机通过传输接口与工业机器人连接,负责向工业机器人转发来自于操作手柄和客户端主机的操作指令,并且将工业机器人的状态和视频数据通过网络传回客户端主机,提供操作者观测或监控工业机器人完成和执行作业的情况。
[0005]
所述操作手柄上分别设置有左行操作按钮、右行操作按钮、上行操作按钮、下行操作按钮及三个控制按钮和一个传输接口。
[0006]
本发明专利与现有技术相比,具有如下优点与有益效果:
[0007]
本发明专利可以极大地降低工业机器人操作控制的实现难度、开发成本、维护成本,并且能使操作者灵活地、友好地、可靠地操作工业机器人完成各种动作和任务,并且即时地观测或监控工业机器人的工作状况。
附图说明
[0008]
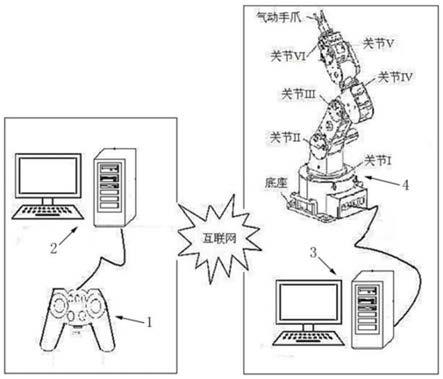
图1为本发明专利的总体架构图。
[0009]
图2为本发明专利的功能结构图。
[0010]
图3为本发明专利的操作手柄结构示意图。
[0011]
图4为六自由度工业机器人及其机械臂(气动手爪)的结构示意图。
具体实施方式
[0012]
下面结合具体实施例对本发明专利作进一步说明。
[0013]
如图1至图3所示,本实施例所述的一种机器人远程操控系统,具体是采用客户端/服务器端架构即c/s架构(客户端主要负互责对工业机器人进行仿真控制和远程操作与控制,服务器端主要负责为客户端提供工业机器人本地控制代理。服务器端也同时提供部分工业机器人本地控制功能),并配置有一操作手柄1作为其输入装置,操作者通过该操作手柄1发出控制工业机器人4及其机械臂工作,所述c/s架构由客户端主机2和服务器端主机3组成,所述客户端主机2通过传输接口与操作手柄1连接,所述服务器端主机3通过传输接口与工业机器人4连接,负责向工业机器人4转发来自于操作手柄1和客户端主机2的操作指令,并且将工业机器人4的状态和视频数据通过网络传回客户端主机2,提供操作者观测或监控工业机器人4完成和执行作业的情况。
[0014]
所述操作手柄1上分别设置有左行操作按钮101、右行操作按钮102、上行操作按钮103、下行操作按钮104及三个控制按钮105、106、107和一个传输接口108。操作者通过操作手柄1发出指令驱动工业机器人4及其机械臂的关节旋转,从而使整个工业机器人4及其机械臂完成伸出、缩回、前进、后退、上移和下移等六个动作。
[0015]
本实施例的一种机器人远程操控系统的操作对象为一台六自由度工业机器人及其机械臂,如图4所示。按照从下到上,从左到右顺序,它的6个关节和6个回转轴依次为:关节ⅰ与回转ⅰ轴、关节ⅱ与回转ⅱ轴、关节ⅲ与回转ⅲ轴、关节ⅳ与回转ⅳ轴、关节
ⅴ
与回转
ⅴ
轴、关节
ⅵ
与回转
ⅵ
轴。该工业机器人的各个关节通过限位开关控制其转动角度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1