一种视听交互智能机器人及控制系统的制作方法
1.本发明涉及智能机器人技术领域,特别涉及一种视听交互智能机器人及控制系统。
背景技术:
2.机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人。在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。
3.而现有的机器人大都为提前录入指令,机器人重复该指令动作,若需要修改指令则需要通过计算机进行修改,然而可通过语音和动作输入一个视听交互,从而令机器人作出相应的指令动作,是计算机输入的进一步发展,但是该方式容易出现失误,识别度底。
技术实现要素:
4.本发明的目的在于提供一种视听交互智能机器人及控制系统,通过移动底座活动连接机器人功能筒,第二皮带轮带动机器人功能筒与驱动移动轮同步旋转,摄像头本体能够始终朝向机器人移动的方向,方便观察移动路况和录取动作指令,角度调节电机带动第四皮带轮旋转,带动摄像头本体旋转,调整摄像头本体的拍摄角度,能够拍摄更广的范围,在机器人功能筒内设置控制系统,视觉交互模块和听觉交互模块能够实现机器人与外界的视听交互,互联网通信模块加强及机器人的远程控制,驱动模块用于协助机器人移动位置,使用灵活,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种视听交互智能机器人,包括移动底座,所述移动底座的上表面固定连接有旋转台座,旋转台座的内部安装有转向电机,转向电机的输出端固定连接有第一皮带轮,旋转台座上活动连接有机器人功能筒,移动底座的四角上均贯穿连接有支撑轮架,支撑轮架的下端安装有万向轮,移动底座的中心位置上贯穿连接有驱动转向轮,所述驱动转向轮包括驱动轮支撑架和驱动移动轮,驱动轮支撑架的下端与驱动移动轮中心轴活动连接,驱动轮支撑架上表面的中心位置上固定连接旋转柱,旋转柱的上端贯穿移动底座,并连接有第二皮带轮,第二皮带轮与第一皮带轮通过第一皮带套接,所述机器人功能筒的上端设置有摄像头机构,机器人功能筒上端的一侧内嵌有显示屏,显示屏两侧的机器人功能筒上分别设置有扬声器和麦克风,显示屏下方的机器人功能筒上设置有键盘抽屉。
6.优选的,所述旋转柱上套接有减震弹簧,减震弹簧的上端连接有限位圆片,限位圆片与移动底座的下表面相抵。
7.优选的,所述摄像头机构包括摄像头本体、摄像头固定架和角度调节电机,摄像头本体的一端连接有旋转轴,旋转轴与摄像头固定架铰接,旋转轴上连接有第三皮带轮,角度调节电机的输出端连接有第四皮带轮,第四皮带轮通过第二皮带套接。
8.优选的,所述显示屏倾斜设置,且显示屏下端的机器人功能筒上设置有扫码装置。
9.优选的,所述机器人功能筒下端的边缘固定连接有卡合圈,卡合圈与旋转台座卡合连接,机器人功能筒靠近卡合圈中心的位置上连接有中心轴,中心轴与第二皮带轮的中心轴固定连接。
10.优选的,所述卡合圈的外壁上等距离的设置有滑动滚珠。
11.优选的,所述驱动移动轮内设置有轮毂电机。
12.本发明要解决的另一技术问题是提供一种视听交互智能机器人的控制系统,包括视觉交互模块和听觉交互模块,所述视觉交互模块包括动作指令录入模块、动作指令存储模块、动作识别模块和显示模块,动作指令录入模块和动作指令存储模块电性连接,动作指令存储模块与动作识别模块电性连接,动作识别模块与显示模块电性连接,显示模块与显示屏电性连接,动作指令录入模块与摄像头本体电性连接,听觉交互模块包括声音捕捉模块、声音指令存储模块、语音关键信息提取模块和声音指令判断模块,声音指令存储模块分别与声音捕捉模块和语音关键信息提取模块电性连接,语音关键信息提取模块的输出端与声音指令判断模块电性连接,声音指令判断模块的输出端连接有语音输出模块,语音输出模块的输出端与扬声器电性连接,声音捕捉模块与麦克风电性连接。
13.优选的,一种视听交互智能机器人的控制系统,还包括互联网通信模块和驱动模块,所述互联网通信模块分别与动作指令存储模块和声音指令存储模块无线通信连接,互联网通信模块内设置有手动设置模块和信息反馈模块,手动设置模块与键盘抽屉电性连接,信息反馈模块分别与动作识别模块和声音指令判断模块电性连接,驱动模块内设置有程序存储模块,程序存储模块与互联网通信模块通信连接,程序存储模块的输出端连接有控制端模块,控制端模块分别与转向电机、驱动移动轮和角度调节电机电性连接。
14.与现有技术相比,本发明的有益效果是:本发明提出的一种视听交互智能机器人及控制系统,通过移动底座活动连接机器人功能筒,第二皮带轮带动机器人功能筒与驱动移动轮同步旋转,摄像头本体能够始终朝向机器人移动的方向,方便观察移动路况和录取动作指令,角度调节电机带动第四皮带轮旋转,带动摄像头本体旋转,调整摄像头本体的拍摄角度,能够拍摄更广的范围,在机器人功能筒内设置控制系统,视觉交互模块和听觉交互模块能够实现机器人与外界的视听交互,互联网通信模块加强及机器人的远程控制,驱动模块用于协助机器人移动位置,使用灵活。
附图说明
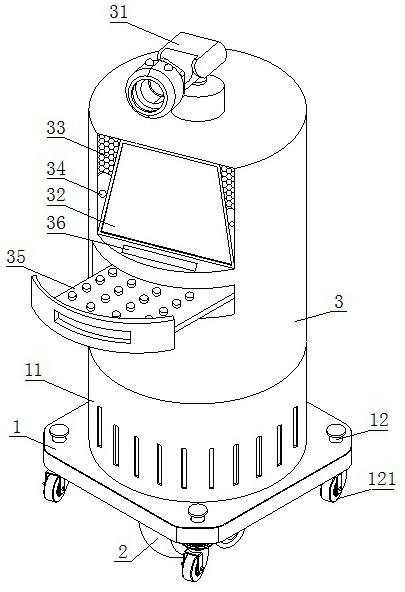
15.图1为本发明的机器人结构图;图2为本发明的驱动转向轮结构图;图3为本发明的机器人功能筒结构图;图4为本发明的摄像头机构结构图;图5为本发明的控制系统模块图;图6为本发明的控制系统连接模块图。
16.图中:1、移动底座;11、旋转台座;111、转向电机;112、第一皮带轮;12、支撑轮架;121、万向轮;2、驱动转向轮;21、驱动轮支撑架;211、旋转柱;212、第二皮带轮;213、第一皮带;214、减震弹簧;22、驱动移动轮;3、机器人功能筒;31、摄像头机构;311、摄像头本体;
3111、旋转轴;3112、第三皮带轮;312、摄像头固定架;313、角度调节电机;3131、第四皮带轮;3132、第二皮带;32、显示屏;33、扬声器;34、麦克风;35、键盘抽屉;36、扫码装置;37、卡合圈;371、滑动滚珠;4、视觉交互模块;41、动作指令录入模块;42、动作指令存储模块;43、动作识别模块;44、显示模块;5、听觉交互模块;51、声音捕捉模块;52、声音指令存储模块;53、语音关键信息提取模块;54、声音指令判断模块;55、语音输出模块;6、互联网通信模块;61、手动设置模块;62、信息反馈模块;7、驱动模块;71、程序存储模块;72、控制端模块。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.请参阅图1-图4,一种视听交互智能机器人,包括移动底座1,移动底座1的上表面固定连接有旋转台座11,旋转台座11的内部安装有转向电机111,转向电机111的输出端固定连接有第一皮带轮112,旋转台座11上活动连接有机器人功能筒3,移动底座1的四角上均贯穿连接有支撑轮架12,支撑轮架12的下端安装有万向轮121,移动底座1的中心位置上贯穿连接有驱动转向轮2,驱动转向轮2包括驱动轮支撑架21和驱动移动轮22,驱动轮支撑架21的下端与驱动移动轮22中心轴活动连接,驱动移动轮22内设置有轮毂电机,驱动移动轮22自带驱动结构,节省空间,方便安装,驱动轮支撑架21上表面的中心位置上固定连接旋转柱211,旋转柱211上套接有减震弹簧214,减震弹簧214的上端连接有限位圆片,限位圆片与移动底座1的下表面相抵,通过减震弹簧214起到减震作用,能够减小颠簸,旋转柱211的上端贯穿移动底座1,并连接有第二皮带轮212,第二皮带轮212与第一皮带轮112通过第一皮带213套接。
19.机器人功能筒3的上端设置有摄像头机构31,摄像头机构31包括摄像头本体311、摄像头固定架312和角度调节电机313,摄像头本体311的一端连接有旋转轴3111,旋转轴3111与摄像头固定架312铰接,旋转轴3111上连接有第三皮带轮3112,角度调节电机313的输出端连接有第四皮带轮3131,第四皮带轮3131通过第二皮带3132套接,角度调节电机313带动第四皮带轮3131旋转,实现第三皮带轮3112旋转,带动摄像头本体311旋转,调整摄像头本体311的拍摄角度,机器人功能筒3上端的一侧内嵌有显示屏32,显示屏32两侧的机器人功能筒3上分别设置有扬声器33和麦克风34,显示屏32下方的机器人功能筒3上设置有键盘抽屉35,显示屏32倾斜设置,且显示屏32下端的机器人功能筒3上设置有扫码装置36,通过键盘抽屉35和扫码装置36能够对视听交互智能机器人进行多种方式控制,机器人功能筒3下端的边缘固定连接有卡合圈37,卡合圈37与旋转台座11卡合连接,机器人功能筒3靠近卡合圈37中心的位置上连接有中心轴,中心轴与第二皮带轮212的中心轴固定连接,第二皮带轮212带动机器人功能筒3与驱动移动轮22同步旋转,摄像头本体311能够始终朝向机器人移动的方向,卡合圈37的外壁上等距离的设置有滑动滚珠371,滑动滚珠371起到润滑,减小摩擦的作用。
20.请参阅图5-图6,为了更好的展现视听交互智能机器人的控制流程,本实施例现提出一种视听交互智能机器人的控制系统,包括视觉交互模块4和听觉交互模块5,视觉交互
模块4包括动作指令录入模块41、动作指令存储模块42、动作识别模块43和显示模块44,动作指令录入模块41和动作指令存储模块42电性连接,动作指令存储模块42与动作识别模块43电性连接,动作识别模块43与显示模块44电性连接,显示模块44与显示屏32电性连接,动作指令录入模块41与摄像头本体311电性连接,通过动作指令录入模块41记录动作指令,再由动作识别模块43对该动作指令识别判断,并作出相应的对应措施,通过显示屏32显示出来,听觉交互模块5包括声音捕捉模块51、声音指令存储模块52、语音关键信息提取模块53和声音指令判断模块54,声音指令存储模块52分别与声音捕捉模块51和语音关键信息提取模块53电性连接,语音关键信息提取模块53的输出端与声音指令判断模块54电性连接,声音指令判断模块54的输出端连接有语音输出模块55,语音输出模块55的输出端与扬声器33电性连接,声音捕捉模块51与麦克风34电性连接,麦克风34收录声音指令,通过语音关键信息提取模块53提取关键信息,再由声音指令判断模块54判断指令目的,做出相应措施,由扬声器33做出反馈。
21.一种视听交互智能机器人的控制系统,还包括互联网通信模块6和驱动模块7,互联网通信模块6分别与动作指令存储模块42和声音指令存储模块52无线通信连接,互联网通信模块6内设置有手动设置模块61和信息反馈模块62,手动设置模块61与键盘抽屉35电性连接,信息反馈模块62分别与动作识别模块43和声音指令判断模块54电性连接,驱动模块7内设置有程序存储模块71,程序存储模块71与互联网通信模块6通信连接,程序存储模块71的输出端连接有控制端模块72,控制端模块72分别与转向电机111、驱动移动轮22和角度调节电机313电性连接,互联网通信模块6用于接收智能机器人的收到的动作和声音信息,可以通过无线网远程获取,方便对机器人进行控制,另外根据机器人所处的环境,选用合适的驱动程序,利用控制端模块72控制机器人移动。
22.工作过程:使用时,根据机器人所处的环境,选用合适的驱动程序,利用控制端模块72控制机器人移动,驱动移动轮22自带驱动结构,控制机器人行走,利用转向电机111,带动第一皮带轮112旋转,实现第二皮带轮212转动,第二皮带轮212带动机器人功能筒3与驱动移动轮22同步旋转,摄像头本体311能够始终朝向机器人移动的方向,可以探明移动路径,角度调节电机313带动第四皮带轮3131旋转,实现第三皮带轮3112旋转,带动摄像头本体311旋转,调整摄像头本体311的拍摄角度,摄像头本体311拍摄动作指令,通过动作指令录入模块41记录动作指令,再由动作识别模块43对该动作指令识别判断,并作出相应的对应措施,通过显示屏32显示出来,对做出指令者进行反馈,麦克风34收录声音指令,通过语音关键信息提取模块53提取关键信息,再由声音指令判断模块54判断指令目的,做出相应措施,由扬声器33做出反馈,互联网通信模块6用于接收智能机器人的收到的动作和声音信息,可以通过无线网远程获取。
23.综上所述:本视听交互智能机器人及控制系统,通过移动底座1活动连接机器人功能筒3,第二皮带轮212带动机器人功能筒3与驱动移动轮22同步旋转,摄像头本体311能够始终朝向机器人移动的方向,方便观察移动路况和录取动作指令,角度调节电机313带动第四皮带轮3131旋转,带动摄像头本体311旋转,调整摄像头本体311的拍摄角度,能够拍摄更广的范围,在机器人功能筒3内设置控制系统,视觉交互模块4和听觉交互模块5能够实现机器人与外界的视听交互,互联网通信模块6加强及机器人的远程控制,驱动模块7用于协助机器人移动位置,使用灵活。
24.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1