一种机器人关节摩擦力补偿方法与流程
1.一种机器人关节摩擦力补偿方法,属于机器人技术领域。
背景技术:
2.机器人的广泛应用,为工业生产带来了极大的便利,在工业生产中应用机器人时,通常会先采用机器人示教技术对机器人进行拖动示教,以使得机器人能够在复杂的工作场景下完成工作任务,有效的提高工作质量以及工作效率。
3.在拖动示教的过程中,由于机器人机械臂的关节受到摩擦力的影响,使得对机器人的拖动比较困难,因此,需要对机器人关节进行摩擦力力矩补偿,以使得操作者能够轻松的拖动机器人进行拖动示教。然而,在现有技术对机器人关节摩擦力力矩补偿的技术方案中,一般使用外部力传感器的方法需要通过力传感器获取关节扭矩,用于补偿关节摩擦力,力传感器通常安装于机器人关节内部,占用关节空间,硬件成本以及软件的设计成本均较高。因此设计一种可以对降低软硬件成本、且简单易用的机器人关节摩擦力补偿方法,成为本领域亟待解决的问题。
技术实现要素:
4.本发明要解决的技术问题是:克服现有技术的不足,提供一种无需额外增设硬件,降低了硬件及软件设计成本,避免对机器人进行改装,易于实现的机器人关节摩擦力补偿方法。
5.本发明解决其技术问题所采用的技术方案是:该机器人关节摩擦力补偿方法,其特征在于:包括如下步骤:
6.步骤a,机器人在(
‑
20rpm,20rpm)的速度区间内,通过固定于机器人关节处的力矩传感器对关节处的力矩进行采集,并采集得到每个机器人关节在(
‑
20rpm,20rpm)速度区间内的一组摩擦力数据;
7.步骤b,确定机器人关节处的摩擦力模型,根据步骤a中采集得到的每个机器人关节的摩擦力数据,通过最小二乘法,得到机器人关节处的摩擦力计算公式;
8.步骤c,在零速度区间内,二次确定机器人关节处的摩擦力;
9.步骤d,确定机器人关节最终的摩擦力力矩,摩擦力力矩为摩擦力计算公式计算得到的摩擦力数值与摩擦力系数的乘积;
10.步骤e,将步骤d中求得的摩擦力力矩代入机器人动力学模型计算得到对机器人关节的控制力拒;
11.步骤f,机器人控制器根据步骤e中计算得到的控制力拒驱动机器人关节动作。
12.优选的,在步骤a中,在所述的(
‑
20rpm,20rpm)速度区间内,每隔0.5rpm对关节处的力矩进行采集。
13.优选的,在步骤a中,所述的摩擦力数据包括机器人关节处的运行速度以及在该运行速度下对应的摩擦力数值。
14.优选的,在步骤a中,所述的摩擦力模型为库仑力加黏性摩擦力模型或库伦加黏性加stribeck效应的摩擦力模型。
15.优选的,所述的库仑力加黏性模型为:
[0016][0017]
其中:f
c
表示库伦摩擦力,表示关节的运行速度,σ表示关节的黏性摩擦力系数,sgn()为符号函数;
[0018]
所述的库伦加黏性加stribeck效应的摩擦力模型为:
[0019][0020]
其中:f
c
表示库伦摩擦力,f
s
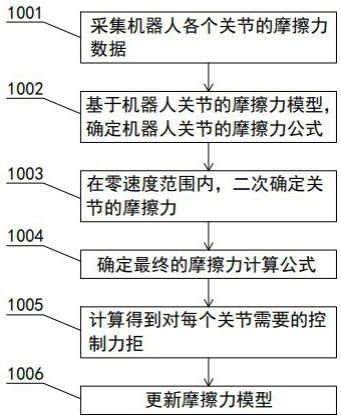
表示静摩擦力,表示关节的运行速度,σ表示关节的黏性摩擦力系数,sgn()为符号函数,表示stribeck速度。
[0021]
优选的,步骤d中所述的摩擦力计算公式为:
[0022][0023]
其中,表示关节的运行速度,δ表示摩擦力的补偿系数,δ=1.2。
[0024]
优选的,步骤c中所述的零速度区间为(
‑
1rpm,1rpm)。
[0025]
优选的,步骤e中所述的动力学模型为:
[0026][0027]
其中:(τ
‑
τ
e
)为所述的控制力拒,m(q)表示惯性系数矩阵,表示粘滞摩擦系数矩阵,g(q)表示重力矩向量,表示摩擦力力矩,q表示关节位置,表示关节速度,表示关节加速度。
[0028]
优选的,在所述的步骤d中,摩擦力系数取值范围为0~1。
[0029]
与现有技术相比,本发明所具有的有益效果是:
[0030]
在本机器人关节摩擦力补偿方法中,无需额外增设硬件,降低了硬件及软件设计成本,避免对机器人进行改装,易于实现。
[0031]
在本机器人关节摩擦力补偿方法中,将速度区间(
‑
1rpm,1rpm)定义为零速度范围,当机器人的某个关节处于该区间范围内时,表示机器人该关节处于启动状态,而伺服电机在启动时同时要克服关节处所存在的静摩擦力,因此在启动阶段需要对关节处的摩擦力进行进一步补偿,提高了摩擦力补偿的精确性和可靠性。
附图说明
[0032]
图1为机器人关节摩擦力补偿方法流程图。
具体实施方式
[0033]
图1是本发明的最佳实施例,下面结合附图1对本发明做进一步说明。
[0034]
如图1所示,一种机器人关节摩擦力补偿方法,包括如下步骤:
[0035]
步骤1001,采集机器人各个关节的摩擦力数据;
[0036]
当机器人在(
‑
20rpm,20rpm)的速度区间运行时,通过固定在机器人每个关节处的关节式传感器,以0.5rpm为间隔得每个关节的摩擦力数据集合,摩擦力数据集合包括该关节的运动速度以及在该运动速度下的摩擦力值。在本机器人关节摩擦力补偿方法中,对机器人的至少30个关节进行数据采集,并分别得到摩擦力数据集合。
[0037]
关节的摩擦力值通过设置在关节处的关节式力矩传感器采集得到,关节式力矩传感器安装在每个关节减速器的输出端。关节式力矩传感器与每个关节对应的伺服电机的伺服驱动器连接,伺服驱动器与机器人控制器相连。
[0038]
步骤1002,基于机器人关节的摩擦力模型,确定机器人关节的摩擦力公式;
[0039]
在本机器人关节摩擦力补偿方法中,采用如下两个具体的模型作为摩擦力模型:库仑力加黏性摩擦力模型或库伦加黏性加stribeck效应摩擦力模型:
[0040]
库仑力加黏性模型如下所示:
[0041][0042]
其中:f
c
表示库伦摩擦力,表示关节的运行速度,σ表示关节的黏性摩擦力系数,sgn()为符号函数。
[0043]
库伦加黏性加stribeck效应的摩擦力模型如下所示:
[0044][0045]
其中:f
c
表示库伦摩擦力,f
s
表示静摩擦力,表示关节的运行速度,σ表示关节的黏性摩擦力系数,sgn()为符号函数,表示stribeck速度。
[0046]
优选采用库仑力加黏性摩擦力模型,确定所采用的摩擦力模型之后,通过步骤1001中所得到的机器人关节的摩擦力数据集合,采用最小二乘法,确定模型中的各项系数,确定机器人关节的摩擦力计算公式。
[0047]
步骤1003,在零速度范围内,二次确定机器人关节处的摩擦力;
[0048]
在本机器人关节摩擦力补偿方法中,将速度区间(
‑
1rpm,1rpm)定义为零速度范围,当机器人的某个关节处于该区间范围内时,表示机器人该关节处于启动状态,而伺服电机在启动时同时要克服关节处所存在的静摩擦力,因此在启动阶段需要对关节处的摩擦力进行进一步补偿。
[0049]
步骤1004,确定最终的摩擦力计算公式;
[0050]
机器人关节处的摩擦力公式如下公式(3)所示:
[0051][0052]
其中,表示关节的运行速度,δ表示摩擦力的补偿系数,δ=1.2。
[0053]
步骤1005,计算得到对机器人关节需要的控制力矩。
[0054]
根据如下机器人的动力学模型,计算得到机器人控制器通过伺服控制器以及伺服电机对机器人关节所输出的控制力拒:
[0055][0056]
其中:(τ
‑
τ
e
)为所述的控制力拒,m(q)表示惯性系数矩阵,表示粘滞摩擦系数矩阵,g(q)表示重力矩向量,表示摩擦力力矩,q表示关节位置,表示关节速度,表示关节加速度。
[0057]
步骤1006,更新摩擦力模型;
[0058]
在机器人控制器中更新机器人摩擦力模型。
[0059]
具体补偿过程及原理如下:
[0060]
当机器人关节速度在(
‑
20rpm,20rpm)时,首先通过固定于机器人关节处减速机输出端的关节式力矩传感器,每间隔0.5rpm采集机器人关节处的力矩,并根据测得的力矩数值得到机器人关节处的摩擦力,并针对每一个关节得到一组摩擦力数据集合,在该摩擦力数据集合中包括机器人关节的运行速度以及该速度下的摩擦力数值。
[0061]
然后确认机器人摩擦力模型,然后根据采集到的摩擦力数据集合,通过最小二乘法得到摩擦力模型中的系数,从而得到摩擦力计算公式。根据摩擦力计算公式即可计算得到每一个速度下机器人关节的摩擦力力值,摩擦力力值与摩擦力系数相乘得到摩擦力力矩。
[0062]
由于伺服电机在启动过程中,还需要克服关节处存在的静摩擦力,因此当机器人关节的运动速度(
‑
1prm,1rpm)区间时,对该区间内的摩擦力进行二次处理。当确定机器人关节在(
‑
20rpm,20rpm)区间内的摩擦力力矩后,将摩擦力力矩代入机器人动力学模型求得对机器人关节处需要施加的控制力矩,然后在机器人控制器中更新机器人摩擦力模型,在机器人动作时,由机器人控制器按照控制力矩通过伺服控制器对伺服电机进行控制,控制机器人关节动作。
[0063]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1