一种可移动的分拣机械臂的制作方法
[0001]
本实用新型属于机械领域,具体涉及一种可移动的分拣机械臂。
背景技术:
[0002]
目前机械臂在日常生活中扮演着重要角色,对应小批量生产方式,提高生产效率。除点胶作业之外,可对应uv照射,零件放置,螺丝锁定,电路板切割等各种工作。但大多机械臂都存在笨重而复杂的问题,同时成本高昂。机械臂的关节配合不流畅,可旋转空间小,且难以适应各种复杂的环境,以及运动时出现抖动等情况。
技术实现要素:
[0003]
针对现有技术中的上述不足,本实用新型提供的一种可移动的分拣机械臂解决了机械臂可旋转空间小,环境适应性差的问题。
[0004]
为了达到上述实用新型目的,本实用新型采用的技术方案为:一种可移动的分拣机械臂,包括形状为长方体且镂空的底部支架,所述底部支架一面上设置有可旋转的圆柱体底座,其另一面四个角上分别设置有关于底部支架另一面轴线对称的全向轮,其内部设置有控制模块;每个所述全向轮均设置与其对应的第一电机,所述底座的一端面与底部支架连接,其另一端面中心设置有第二电机,所述第二电机的输出端与第一连接臂的一端连接,所述第一连接臂的另一端与第二连接臂的一端连接,所述第二连接臂的另一端上设置有第三电机,所述第三电机的输出端与第三连接臂的一端连接,所述第三连接臂的另一端上设置有第四电机,所述第四电机的输出端上设置有第五电机,所述第五电机的输出端上设置有夹持机构,所述夹持机构上设置有与其一起运动的摄像模块以及驱动电机。
[0005]
进一步地,所述第一连接臂、第二连接臂和第三连接臂均为u型臂。
[0006]
进一步地,所述第二电机的轴线平行于水平面,所述第三电机的轴线平行于水平面,所述第四电机的轴线平行于水平面,所述第五电机的轴线平行于铅垂面,所述驱动电机的轴线平行于铅垂面。
[0007]
进一步地,所述控制模块用于与计算机进行通信和控制分拣机械臂进行夹持工作。
[0008]
进一步地,所述控制模块采用stm32f103芯片作为主控芯片。
[0009]
进一步地,所述底部支架采用铝制材料。
[0010]
进一步地,所述第三电机与第四电机的轴线垂直。
[0011]
进一步地,底部支架中设置有铅蓄电池作为系统电源。
[0012]
本实用新型的有益效果为:
[0013]
(1)本实用新型中各个连接臂通过电机驱动,具有多个自由度,实现大范围且多角度内抓取物体;机械臂通过电机驱动,装配较为简单,易批量生产。
[0014]
(2)本实用新型夹持机构上设置有摄像模块,实现实时的拍照,实时监测物体的最新位置和运动特征。
[0015]
(3)本实用新型底部支架上设置有4个全向轮,结构紧凑牢固,运动灵活平稳,可以适应多种地形。
附图说明
[0016]
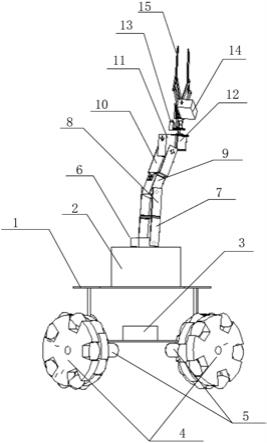
图1为本实用新型提出的一种可移动的分拣机械臂示意图。
[0017]
图2为本实用新型中摄像模块与控制模块中控制芯片连接关系示意图。
[0018]
其中:1-底部支架、2-圆柱体底座、3-控制模块、4-全向轮5-第一电机、6-第二电机、7-第一连接臂、8-第二连接臂、9-第三电机、10-第三连接臂、11-第四电机、12-第五电机、13-摄像模块、14-驱动电机、15-夹持机构。
具体实施方式
[0019]
下面对本实用新型的具体实施方式进行描述,以便于本技术领域的技术人员理解本实用新型,但应该清楚,本实用新型不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本实用新型的精神和范围内,这些变化是显而易见的,一切利用本实用新型构思的发明创造均在保护之列。
[0020]
下面结合附图详细说明本实用新型的实施例。
[0021]
如图1所示,一种可移动的分拣机械臂,包括形状为长方体且镂空的底部支架1,所述底部支架1一面上设置有可旋转的圆柱体底座2,其另一面四个角上分别设置有关于底部支架1另一面轴线对称的全向轮4,其内部设置有控制模块3;每个所述全向轮4均设置与其对应的第一电机5,所述底座2的一端面与底部支架1连接,其另一端面中心设置有第二电机6,所述第二电机6的输出端与第一连接臂7的一端连接,所述第一连接臂7的另一端与第二连接臂8的一端连接,所述第二连接臂8的另一端上设置有第三电机9,所述第三电机9的输出端与第三连接臂10的一端连接,所述第三连接臂10的另一端上设置有第四电机11,所述第四电机11的输出端上设置有第五电机12,所述第五电机12的输出端上设置有夹持机构15,所述夹持机构15上设置有与其一起运动的摄像模块13以及驱动电机14。
[0022]
在本实施例中,摄像模块13采用的型号为ov7670,电机采用的型号均为j-5718hb6401,且每个电机均设置有与其对应的型号为dm542的驱动芯片。
[0023]
摄像模块图像采集电路采用24mhz有源晶振为ov7670提供系统时钟。为了解决微处理器与摄像模块间的数据传输速率不一致问题,在二者之间加入一片al422b帧缓存器,将摄像模块采集的图像数据缓存后再送给微处理器。为实现将ov7670输出的图像信号自动地存入al422b芯片,电路采用了一片与非门芯片74hc00,以便产生符合al422b要求的写时序。需要注意的是,由于al422b芯片正常工作需要3.3v供电,如果stm32f103使用3v电压供电时,需要在两芯片接口之间增加一个74hc573 d锁存器,以满足高/低电平的要求。利用stm32f103的pc0~pc7口接收ov7670输出经过al422b缓存后的8位图像数据。ov7670的sio_d、sio_c接口与stm32f103的pa6、pa7引脚相连,通过该接口实现对摄像模块的初始化配置。stm32f103的pe0、pe1、pb7、pb8分别控制al422b的时钟信号、写复位、读复位以及读使能信号。pb9与ov7670输出的行扫描信号通过与非芯片实现对帧缓存器写使能的控制,stm32f103的pa10引脚通过中断的方式检测摄像模块是否输出一帧完整的图像。
[0024]
所述第一连接臂7、第二连接臂8和第三连接臂10均为u型臂。
[0025]
所述第二电机6的轴线平行于水平面,所述第三电机9的轴线平行于水平面,所述第四电机11的轴线平行于水平面,所述第五电机12的轴线平行于铅垂面,所述驱动电机14的轴线平行于铅垂面。
[0026]
所述控制模块3用于与计算机进行通信和控制分拣机械臂进行夹持工作。
[0027]
所述控制模块3采用stm32f103芯片作为主控芯片,其采用lqfp100封装。
[0028]
在本实施中,除了单片机最小系统必要的连接关系外,主控芯片与其他器件的引脚关系为:主控芯片的pa0-pa5引脚分别与型号为nrf2401+的无线通信模块的ce引脚、csn引脚、sck引脚、mosi引脚、miso引脚和irq引脚一一对应连接,主控芯片的pb0-pb7和pb9-pb12引脚分别与4个第一电机5对应驱动芯片的pls-引脚、dir-引脚和ena-引脚一一对应连接,主控芯片的pa8-pa10引脚分别与第二电机6对应驱动芯片的pls-引脚、dir-引脚和ena-引脚连接,主控芯片的pa11-pa13分别与第三电机9对应驱动芯片的pls-引脚、dir-引脚和ena-引脚连接,主控芯片的pb13-pb15引脚分别与第四电机11对应驱动芯片的pls-引脚、dir-引脚和ena-引脚连接,主控芯片的pc8-pc10引脚分别与第五电机12对应驱动芯片的pls-引脚、dir-引脚和ena-引脚连接,主控芯片的pc11-pc13引脚分别与驱动电机14对应驱动芯片的pls-引脚、dir-引脚和ena-引脚连接。每个电机的a+引脚、a-引脚、b+引脚和b-引脚分别与其对应的驱动芯片的a+引脚、a-引脚、b+引脚和b-引脚连接,系统电源输出+24v电压、+5v电压和+3.3v电压,其中+24v电压为驱动电机及其驱动芯片供电,+5v电压为单片机供电,+3.3v电压为无线通信模块供电。
[0029]
所述底部支架1采用铝制材料。所述第三电机9与第四电机11的轴线垂直。底部支架1中设置有铅蓄电池作为系统电源。
[0030]
本实用新型的工作原理为:通过计算机发出控制命令,控制模块3接收控制命令,驱动四个第一电机5转动,从而带动装个装置前进。装置到达指定位置后,通过计算机发出抓取目标物的命令,控制第二电机6、第三电机9、第四电机11和第五电机12将第五电机12带动至指定位置,通过控制驱动电机14带动夹持机构进行夹取物品,夹取过程中通过摄像模块13实时采集夹持画面,进一步调整夹取位置。
[0031]
本实用新型的有益效果为:
[0032]
(1)本实用新型中各个连接臂通过电机驱动,具有多个自由度,实现大范围且多角度内抓取物体;机械臂通过电机驱动,装配较为简单,易批量生产。
[0033]
(2)本实用新型夹持机构上设置有摄像模块,实现实时的拍照,实时监测物体的最新位置和运动特征。
[0034]
(3)本实用新型底部支架上设置有4个全向轮,结构紧凑牢固,运动灵活平稳,可以适应多种地形。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1