特种作业机器人侧斜、交叉路面和连续颠簸性能测试系统的制作方法
1.本实用新型涉及特种作业机器人测试技术领域,特别是特种作业机器人侧斜、交叉路面和连续颠簸性能测试系统。
背景技术:
2.特种作业机器人也称特种机器人,一般专指专业服务机器人,是近年来得到快速发展和广泛应用的一类机器人,在我国国民经济各行业均有应用。其应用范围主要包括:农业、电力、建筑、物流、医疗、护理、康复、安防与救援、军用、核工业、矿业、石油化工、市政工程等。
3.由于特种作业机器人需要面对各种复杂的作业环境,因此,对于特种作业机器人的性能要求较高,而且不同环境对应的性能要求也各不相同。
4.现需要设计一款测试设备,对特种作业机器人的侧斜、交叉路面、连续颠簸性能进行测试。
技术实现要素:
5.本实用新型要解决的技术问题,在于提供一种特种作业机器人侧斜、交叉路面和连续颠簸性能测试系统。
6.本实用新型是这样实现的:特种作业机器人侧斜、交叉路面和连续颠簸性能测试系统,包括
7.侧斜移动性能测试装置,包括支撑架、倾斜平台和升降装置,所述倾斜平台一边活动连接于所述支撑架;所述升降装置输出端连接于所述倾斜平台;
8.减速带,有若干个,且平行间隔布置;
9.倾斜路面平台,有若干个,若干个所述倾斜路面平台依次交叉且倾斜向内布置;
10.其中,所述侧斜移动性能装置、减速带、倾斜路面平台间隔布置。
11.进一步地,所述倾斜平台的一边和所述支撑架铰接。
12.进一步地,所述升降装置包括第一升降机;所述第一升降机的输出端连接于所述倾斜平台。
13.进一步地,所述升降装置包括
14.电机;
15.第二升降机,其输入端连接于所述电机的输出端,且其输出端连接于所述倾斜平台;
16.检测装置,用于检测所述电机的输出量。
17.进一步地,所述升降装置还包括减速机;所述减速机的输入端连接于所述电机的输出端,所述减速机的输出端连接于所述第二升降机的输入端。
18.进一步地,所述升降装置还包括
19.顶杆,顶端活动连接于所述倾斜平台的底部,且底端沿水平方向活动;
20.推杆连接块,活动连接于所述顶杆,且固定连接于所述第二升降机的输出端;
21.其中,所述第二升降机的输出端水平布置。
22.进一步地,所述顶杆的底端设有滚轮,所述滚轮滚动连接于所述支撑架。
23.进一步地,所述检测装置为编码器,所述编码器连接于所述电机的输出轴。
24.进一步地,还包括控制器,所述升降装置通信连接于所述控制器。
25.进一步地,还包括两倾斜垫高平台,设置在所述倾斜平台的前后两端。
26.本实用新型具有如下优点:本实用新型提供一种特种作业机器人侧斜、交叉路面和连续颠簸性能测试系统,包括侧斜移动性能测试装置,包括支撑架、倾斜平台和升降装置,所述倾斜平台一边活动连接于所述支撑架;所述升降装置输出端连接于所述倾斜平台;减速带,有若干个,且平行间隔布置;倾斜路面平台,有若干个,若干个所述倾斜路面平台依次交叉且倾斜向内布置。先操作特种作业机器人移动到倾斜平台上面,然后通过升降装置驱动倾斜平台进行升降,从而调节倾斜平台的倾斜角度至预定的测试角度,最后操作特种作业机器人进行侧斜移动性能测试。然后从所述减速带经过,从而测试连续颠簸性能。最后从若干个所述倾斜路面平台经过,从而对交叉路面的移动性能进行测试。
附图说明
27.下面参照附图结合实施例对本实用新型作进一步的说明。
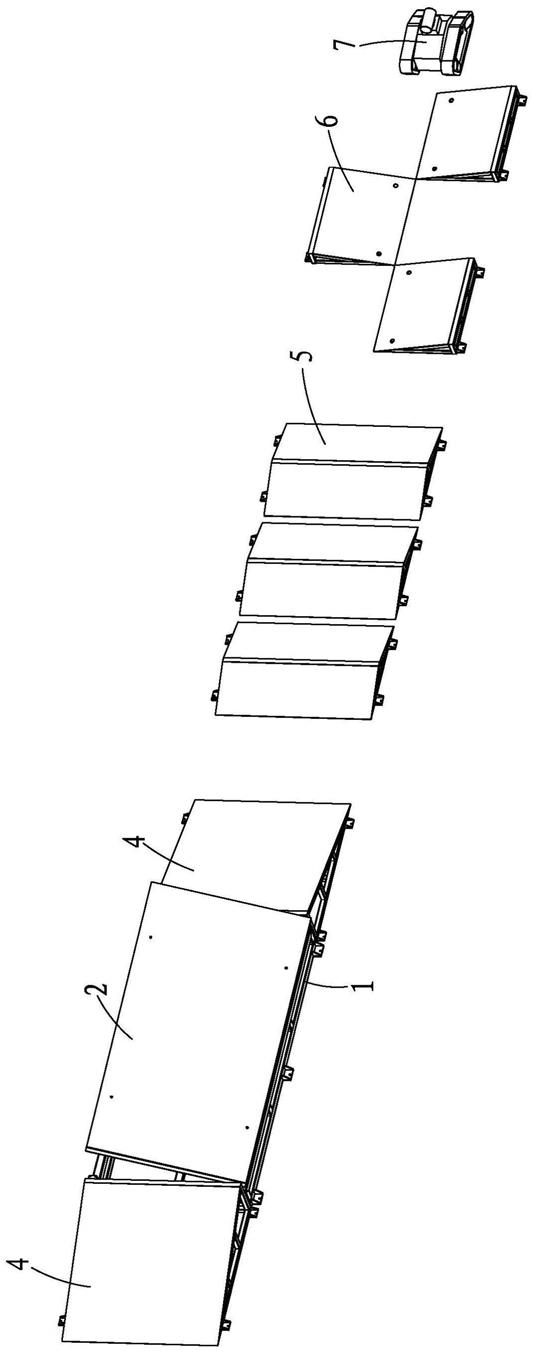
28.图1本实用新型所述的测试系统的立体图。
29.图2为本实用新型所述的侧斜移动性能测试装置的主视图。
30.图3为本实用新型所述的侧斜移动性能测试装置的俯视图。
31.图4为本实用新型所述的侧斜移动性能测试装置的左视图。
32.图5为本实用新型所述的倾斜平台旋转至水平状态的立体图。
33.图6和图7为本实用新型所述的倾斜平台处于一测试状态的立体图。
34.图8和图9为本实用新型所述的倾斜平台和支撑架分解后的示意图。
35.图10为本实用新型所述的倾斜平台和倾斜垫高平台隐藏后的立体图。
36.图11和图12为本实用新型所述的倾斜垫高平台的立体图。
37.图13和图14是本实用新型所述的减速带的立体图。
38.图15和图16是本实用新型所述的倾斜路面平台的立体图。
39.附图标记说明:
40.支撑架1;
41.倾斜平台2;
42.升降装置3,电机31,第二升降机32,检测装置33,减速机34,顶杆 35,推杆连接块36,滚轮37;
43.倾斜垫高平台4;
44.减速带,第一安装板51;
45.倾斜路面平台6,第二安装板61,穿孔62;
46.特种作业机器人7。
具体实施方式
47.本实用新型的实用新型构思如下:
48.先操作特种作业机器人7移动到倾斜平台2上面,然后通过升降装置3 驱动倾斜平台2进行升降,进而使得倾斜平台2绕着支撑架1进行翻转,从而调节倾斜平台2的倾斜角度至预定的测试角度,最后操作特种作业机器人 7进行侧斜移动性能测试。
49.特种作业机器人7从若干个所述减速带5经过,模拟路面连续颠簸,从而测试特种作业机器人7的连续颠簸性能。
50.特种作业机器人7从若干个依次交叉且倾斜向内布置的所述倾斜路面平台6经过,例如,可以沿交叉中线经过,或者往中线旁边一点经过,或者也可按照其它路径移动,这个移动路径可根据测试所需的预定轨迹,操作特种作业机器人7移动即可,模拟交叉路面,从而对特种作业机器人7交叉路面的移动性能进行测试。
51.请参阅图1至图16所示。
52.实施例:
53.本实用新型提供一种特种作业机器人侧斜、交叉路面和连续颠簸性能测试系统,包括
54.侧斜移动性能测试装置,包括支撑架1、倾斜平台2和升降装置3,所述倾斜平台2一边活动连接于所述支撑架1,从而使得所述倾斜平台2可绕该边进行翻转;所述升降装置3输出端连接于所述倾斜平台2;在具体实施中,所述支撑架1可以是地面,例如,所述倾斜平台2的一边铰接在地面,在地面挖凹槽,升降装置3则布置在凹槽内;当然所述支撑架1还可以采用附图所示的实施例。在其它实施例中,所述支撑架1还可以设计成其它结构。
55.由所述升降装置3驱动所述倾斜平台2进行升降,进而绕着所述支撑架 1进行旋转,从而可调节所述倾斜平台2的倾斜角度,从而模拟路面的倾斜角度。
56.减速带5,有若干个,且平行间隔布置,模拟路面连续颠簸,从而测试特种作业机器人7的连续颠簸性能。在具体一实施例中,每所述减速带5 设有第一安装板51,第一安装板51上开设有安装孔,通过螺栓将减速带5 安装在地面或在其它支撑物体上。
57.倾斜路面平台6,有若干个,若干个所述倾斜路面平台6依次交叉且倾斜向内布置;在具体一实施例中,每所述倾斜路面平台6的外侧设有第二安装板61,第二安装板61上也开设有安装孔,同时,在切线路面平台6的内侧开设有穿孔62,通过螺丝锁入安装孔和穿孔62,从而将倾斜路面平台6 固定在地面或其它支撑物体上。
58.其中,所述侧斜移动性能装置、减速带5、倾斜路面平台6三者间隔布置,即在具体实施中,三者无顺序要求,顺序可按需求随意排布,即可呈直线,也可呈曲线布置。例如,在附图所示的实施例中,所述侧斜移动性能装置、减速带5、倾斜路面平台6三者呈直线依次布置。当然在其它实施例中,还可以有其它的排布方式,例如并排,曲线布置等方式。
59.使用时,先操作特种作业机器人7移动到所述倾斜平台2上,然后,通过所述升降装置3进行升降,进而将所述倾斜平台2的倾斜角度调节到测试所需的角度,最后再操作特种作业机器人在倾斜平台2上进行移动,看特种作业机器人是否会发生打滑、侧翻等现象。
60.侧斜移动性能测试完成后,操作特种作业机器人7移动并经过各个所述减速带5,从而进行连续颠簸性能测试,观察特种作业机器人的连续颠簸性能是否符合预定的要求,例如:零部件是否会被颠簸而震散架、或震坏等现象,这个可根据使用需求去设定即可。
61.待连续颠簸性能测试完成后,操作特种作业机器人继续向若干个所述倾斜路面平台6移动,按照预定的轨迹移动,观察特种作业机器人7的交叉路面移动性能是否符合预定的要求,例如:是否会被卡住、翻车等现象。
62.当然,测试顺序也可反过来,从交叉平台性能到连续颠簸性能最后再进行侧斜移动性能测试。
63.在具体实施中,优选地一实施例:所述倾斜平台2的一边和所述支撑架 1铰接。
64.在具体实施中,优选地一实施例:所述升降装置3包括第一升降机(未图示);所述第一升降机(未图示)的输出端连接于所述倾斜平台2。在具体实施中,所述第一升降机(未图示)可采用电缸、液压缸或者螺旋升降机,其活塞杆连接于所述倾斜平台2的底端,活塞杆竖直或倾斜布置都可以。
65.在具体实施中,优选地另一实施例:所述升降装置3包括
66.电机31;
67.第二升降机32,其输入端连接于所述电机31的输出端,且其输出端连接于所述倾斜平台2;在具体一实施例中,所述第二升降机32可采用螺旋升降机;
68.检测装置33,用于检测所述电机31的输出量,从而便于通过调节电机 31的输出量,来调节所述第二升降机32的升降高度,进而调节所述倾斜平台2的倾斜角度。
69.通过电机31驱动第二升降机32进行升降,进而带动所述倾斜平台2 进行升降,并通过所述检测装置33检测电机的输出量,来调节所述第二升降机32的升降高度,进而调节所述倾斜平台2的倾斜角度。
70.所述升降装置3还包括减速机34;所述减速机34的输入端连接于所述电机31的输出端,所述减速机34的输出端连接于所述第二升降机32的输入端。
71.所述升降装置3还包括
72.顶杆35,顶端活动连接于所述倾斜平台2的底部,如顶端可铰接于所述倾斜平台2的底部,且底端沿水平方向活动;在具体一实施中,所述顶杆 35绕推杆连接块36旋转的角度范围为0~90
°
之间。
73.推杆连接块36,活动连接于所述顶杆36,在具体一实施例中,采用铰接,从而所述顶杆35可绕所述推杆连接块36进行旋转,从而可将所述顶杆35进行收纳,降低高度方向的布置尺寸,且固定连接于所述第二升降机32 的输出端;
74.其中,所述第二升降机32的输出端水平布置,从而可降低布置所述第二升降机32时,在高度方向的尺寸。
75.这是因为,不设置所述顶杆35和所述推杆连接块36也可以,但是第二升降机32的输出端需要竖直或倾斜向上布置,这样的话,高度方向的尺寸需要保证能够布置所述第二升降机32。而因为顶杆35和推杆连接块36及倾斜平台2都是活的连接,因此顶杆35可相对两者进行旋转,进而可将顶杆35进行收纳,尽量利用水平方向的空间,因此通过所述推杆连接块36 推动所述顶杆35,进而推动所述倾斜平台2抬升,则可缩短高度布置尺寸。
76.所述顶杆35的底端设有滚轮37,所述滚轮37沿水平方向滚动;所述滚轮37滚动连接于所述支撑架1。当然在其它实施例中,所述滚轮37也可以滚动连接于地面或其它支撑物上。
77.附图所示的实施例中,所述第二升降机32有两个,呈对称布置,使得受力更合理,
抬升更平稳。在其中一所述推杆连接块36的侧壁固定一感应片,设置行程感应开关两个,及原点感应开关一个,用于设置原点、最大行程,最小行程。在具体实施中,各个感应开关和控制器通信连接。
78.所述检测装置33为编码器,所述编码器连接于所述电机31的输出轴。通过所述编码器测量所述电机31的输出量,来调节所述倾斜平台2的倾斜角度。
79.在具体实施中,可将所述升降装置3连接于其它设备的控制装置,将所述的测试装置和其它设备一起使用,采用同一的控制,当然,还可给所述的测试装置单独配置所述控制器,进行单独使用。
80.还包括控制器(未图示),所述升降装置3通信连接于所述控制器(未图示)。所述控制器(未图示)可采用plc,例如plc的型号为:西门子6es7 215
‑
1ag40
‑
0xb0。在具体实施中,所述第一升降机31(未图示)通信连接于控制器(未图示),在另一实施例中,所述电机31、检测装置33分别通信连接于控制器(未图示)。
81.在具体一实施例中,还包括两倾斜垫高平台4,设置在所述倾斜平台2 的前后两端,便于特种作业机器人移动到所述倾斜平台2上,以及从倾斜平台2上下来。
82.具体一使用方式:
83.将所述编码器和电机31分别通信连接于所述控制器(未图示);
84.测试前,控制器(未图示)控制电机31旋转,驱动减速机34,进而带动第二升降机32的输出端沿水平方向伸出,从而带动推杆连接块36向左移动,进而推动所述顶杆35绕着所述推杆连接块36向水平方向旋转至预定的位置,将所述倾斜平台2调节到水平状态。
85.操作特种作业机器人7从一端的倾斜垫高平台4移动到所述倾斜平台2 上;
86.然后,控制器(未图示)控制电机31旋转,驱动减速机34工作,进而带动所述第二升降机32的输出端沿水平方向缩回,从而带动推杆连接块36 沿水平方向向右移动,拉动所述顶杆35向上旋转,将倾斜平台2的一端抬升,并通过所述编码器实时检测电机31的输出轴的旋转圈数,反馈给控制器(未图示),控制器(未图示)根据接收到的电机31的输出量,将电机 31的输出量调节到预定的输出量,从而将倾斜平台2的倾斜角度调节至预定的角度;
87.接下来,按照预定的测试调节操作特种作业机器人进行测试即可,看其性能是否满足所需要求。
88.测试完成后,控制器(未图示)控制电机工作,将倾斜平台2复位,调节至水平,然后操作特种作业机器人从另一侧的倾斜垫高平台4移动下来。
89.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1