一种基于大学生实训的服务机器人的制作方法
1.本实用新型涉及机器人技术领域,具体为一种基于大学生实训的服务机器人。
背景技术:
2.随着科学技术的不断发展,机器人逐渐出现在我们的生活中,其中在大学生实训时也经常会用服务机器人,通过服务机器人来帮助我们学习,给学生们解决问题:
3.传统的大学生实训的服务机器人,使用时,不便对机器机器人手臂进行收缩从而制造一种新型基于大学生实训的服务机器人,以解决上述问题。
技术实现要素:
4.本实用新型的目的在于提供一种基于大学生实训的服务机器人,以解决上述背景技术中提出装置不便对机器人手臂进行收缩的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种基于大学生实训的服务机器人,包括显示屏、滚轮和机器人本体,所述机器人本体的顶端安装有显示屏,所述显示屏的底端连接有旋转结构,所述机器人本体的底端均设置有滚轮,所述机器人本体的两侧均设置有收缩结构,所述收缩结构包括有收缩槽、液压气缸、滑块、摄像头、手臂本体和滑槽,所述液压气缸固定在机器人本体的内部,所述液压气缸的一侧设置有收缩槽,所述液压气缸的内部设置有滑槽,所液压气缸的一侧固定有手臂本体,所述手臂本体的两端均固定有滑块,所述手臂本体的一侧安装有摄像头,所述机器人本体外表面的底端设置有防护结构。
6.优选的,所述旋转结构包括有第一齿轮、第二齿轮、伺服电机和支撑板,所述支撑板固定在机器人本体内部的顶端,所述支撑板的顶端固定有伺服电机,所述伺服电机的一侧安装有第二齿轮,所述第二齿轮的顶端连接有第一齿轮。
7.优选的,所述第一齿轮与显示屏的底部相连接,所述第一齿轮与第二齿轮相啮合连接。
8.优选的,所述防护结构包括有防护侧轮、侧轮槽、防护垫、缓冲槽和缓冲弹簧,所述缓冲槽设置在机器人本体外表面的底端,所述缓冲槽的外表面上安装有缓冲弹簧,所述缓冲弹簧的一侧安装有防护垫,所述防护垫的内部设置有侧轮槽,所述侧轮槽的内部安装有防护侧轮。
9.优选的,所述缓冲槽为环形凹槽状设计,所述缓冲弹簧在缓冲槽的内部呈等间距排列。
10.优选的,所述滑槽的内表面积大于滑块的外表面积,所述滑槽与滑块之间构成滑动结构。
11.与现有技术相比,本实用新型的有益效果是:该基于大学生实训的服务机器人结构合理,具有以下优点:
12.(1)通过在液压气缸的一侧设置收缩槽,收缩槽可对机器人手臂进行收纳,由于有时需要对机器人手臂进行收纳,防止手臂伸出过长受到撞击损坏摄像头,无法使机器人观
测周围环境,当需要对手臂进行收缩时,通过启动液压气缸进行伸缩,然后液压气缸穿过收缩槽固定在手臂本体上,而且滑块在滑槽内进行滑动,使手臂收缩的更稳定,从而实现对机器人手臂的收缩;
13.(2)通过在机器人本体的外表面上设置防护结构,防护结构可对机器人底部进行防撞保护,由于需要对机器人底部进行防撞击保护,通过在缓冲槽的内部安装缓冲弹簧,缓冲弹簧可进行伸缩,给外部固定的防护垫一个缓冲的力,然后缓冲弹簧的外部固定有缓冲槽,当受到撞击时缓冲槽会对内部的机器人本体进行防护,并通过内部安装的防护侧轮进行滚动,带动机器人本体整体进行转动,并同时起到防护的作用,通过多重防护,实现对机器人的防撞保护;
14.(3)通过在显示屏的底部安装第一齿轮,当第一齿轮转动可带动显示屏整体转动,实现对显示屏的转动,方便对学生进行服务,通过启动伺服电机,伺服电机可带动第二齿轮与第一齿轮进行转动,然后第一齿轮带动显示屏进行转动,方便学生对显示屏进行观察学习。
附图说明
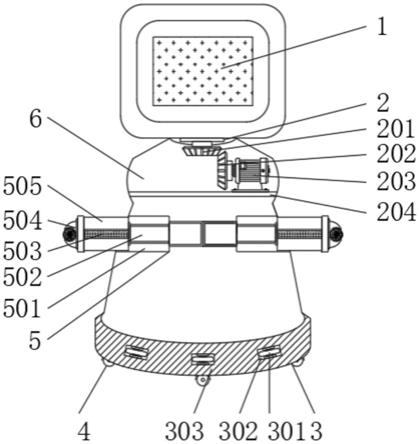
15.图1为本实用新型的正视剖面结构示意图;
16.图2为本实用新型的侧视结构示意图;
17.图3为本实用新型的防护结构俯视结构示意图;
18.图4为本实用新型的收缩结构俯视结构示意图;
19.图5为本实用新型的收缩结构正视结构示意图。
20.图中:1、显示屏;2、旋转结构;201、第一齿轮;202、第二齿轮;203、伺服电机;204、支撑板;3、防护结构;301、防护侧轮;302、侧轮槽;303、防护垫;304、缓冲槽;305、缓冲弹簧;4、滚轮;5、收缩结构;501、收缩槽;502、液压气缸;503、滑块;504、摄像头;505、手臂本体;506、滑槽;6、机器人本体。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1
‑
5,本实用新型提供的一种实施例:一种基于大学生实训的服务机器人,包括显示屏1、滚轮4和机器人本体6,机器人本体6的顶端安装有显示屏1,显示屏1的底端连接有旋转结构2,旋转结构2包括有第一齿轮201、第二齿轮202、伺服电机203和支撑板204,支撑板204固定在机器人本体6内部的顶端,支撑板204的顶端固定有伺服电机203,该伺服电机203的型号可为mr
‑
j2s
‑
20a,伺服电机203的输入端通过导线与单片机的输出端电性连接,伺服电机203的一侧安装有第二齿轮202,第二齿轮202的顶端连接有第一齿轮201,第一齿轮201与显示屏1的底部相连接,第一齿轮201与第二齿轮202相啮合连接;
23.机器人本体6的底端均设置有滚轮4,防护结构3包括有防护侧轮301、侧轮槽302、防护垫303、缓冲槽304和缓冲弹簧305,缓冲槽304设置在机器人本体6外表面的底端,缓冲
槽304的外表面上安装有缓冲弹簧305,缓冲弹簧305的一侧安装有防护垫303,防护垫303的内部设置有侧轮槽302,侧轮槽302的内部安装有防护侧轮301,缓冲槽304为环形凹槽状设计,缓冲弹簧305在缓冲槽304的内部呈等间距排列;
24.机器人本体6的两侧均设置有收缩结构5,收缩结构5包括有收缩槽501、液压气缸502、滑块503、摄像头504、手臂本体505和滑槽506,液压气缸502固定在机器人本体6的内部,该液压气缸502的型号可为sc63x250,液压气缸502的输入端通过导线与单片机的输出端电性连接,液压气缸502的一侧设置有收缩槽501,液压气缸502的内部设置有滑槽506,所液压气缸502的一侧固定有手臂本体505,手臂本体505的两端均固定有滑块503,手臂本体505的一侧安装有摄像头504,机器人本体6外表面的底端设置有防护结构3,滑槽506的内表面积大于滑块503的外表面积,滑槽506与滑块503之间构成滑动结构。
25.工作原理:使用时,该装置采用外接电源,首先,由于有时需要对机器人手臂进行收纳,防止手臂伸出过长受到撞击损坏摄像头504,无法使机器人观测周围环境,当需要对手臂进行收缩时,通过启动液压气缸502进行伸缩,然后液压气缸502穿过收缩槽501固定在手臂本体505上,而且滑块503在滑槽506内进行滑动,使手臂收缩的更稳定,从而实现对机器人手臂的收缩;
26.之后,由于有时候需要对显示屏1进行转动,来方便对学生进行服务,通过启动伺服电机203,伺服电机203可带动第二齿轮202与第一齿轮201进行转动,然后第一齿轮201可带动显示屏1进行转动,通过显示屏1的转动来方便学生对显示屏1进行观察学习;
27.最后,由于需要对机器人底部进行防撞击保护,通过在缓冲槽304的内部安装缓冲弹簧305,缓冲弹簧305伸缩可以给防护垫303一个缓冲的力,当受到撞击时缓冲槽304会对内部的机器人本体6进行防护,并通过内部安装的防护侧轮301进行滚动,带动机器人本体6整体进行转动,并同时起到防护的作用,通过多重防护,使可对机器人进行防撞保护。
28.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1