一种变电站具有异物清理功能的机器人
1.本实用新型属于路面清理机器人技术领域,具体涉及一种变电站具有异物清理功能的机器人。
背景技术:
2.变电站是国家电网的核心枢纽。由于变电站大多都在户外,对站内的环境进行巡检清障是保证电网安全有效运行的关键。为了降低风险,智能机械作业深入推广。为了减轻变电站工作人员的负担,有效保障设备可靠运行,变电站异物清理机器人的研究及相关产品的开发势在必行。目前已有的路面清理设备普遍大型,不适用于变电站内工作。
技术实现要素:
3.有鉴于此,本实用新型为一种变电站具有异物清理功能的机器人,自动清理变电站这种危险工作环境的异物,适用于不平整的路面、绿化带,不仅保障了变电站工作时的安全性,也减少了变电站人工清理异物的危险性,同时提高了工作效率。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.一种变电站具有异物清理功能的机器人,其包括履带式行走机构、底盘、旋转机座、z轴伸缩臂、x轴伸缩臂、前端气动手爪、摄像头、储物筐、储气罐、底座电机、机座电机、z轴电机、x轴电机;所述履带式行走机构与所述底盘通过轴承相连接,所述旋转机座与所述底盘相连接,所述z轴伸缩臂与所述旋转机座相连接,所述x轴伸缩臂与所述z轴伸缩臂连接,所述前端气动手爪与所述x轴伸缩臂连接,所述摄像头嵌于机身前部,所述储物筐和所述储气罐分别置于所述底盘上方。
6.在至少一种实施方式中,所述履带式行走机构前进方向设计有一定角度向上倾斜,可以应付复杂地形。
7.在至少一种实施方式中,所述旋转机座主要通过所述机座电机控制蜗轮蜗杆传动来实现机械臂绕旋转轴360度旋转启停。
8.在至少一种实施方式中,所述z轴伸缩臂通过所述z轴电机控制滚珠丝杆传动来实现所述x轴伸缩臂竖直平面内的伸缩运动。
9.在至少一种实施方式中,所述x轴伸缩臂通过所述x轴电机控制同步带传动来实现所述前端气动手爪水平平面内的伸缩运动。
10.在至少一种实施方式中,所述储物筐置于底盘上方,对所述前端气动手爪夹持的异物收集暂存。
11.相对于现有技术,本实用新型所述的一种变电站具有异物清理功能的机器人具有以下优势:
12.本实用新型所述的一种变电站具有异物清理功能的机器人结构简单,工作效率高,可以自动清理变电站这种危险工作环境的异物,适用于不平整的路面、绿化带,不仅保障了变电站工作时的安全性,也减少了变电站人工清理异物的危险性。
附图说明
13.构成本实用新型的一部分附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
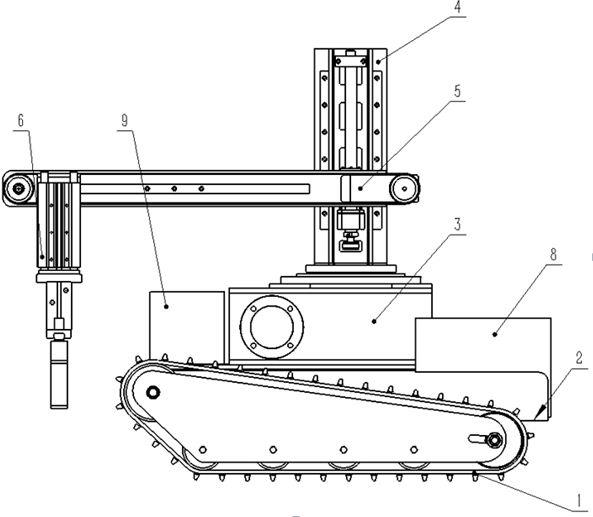
14.图1为本实用新型的实施例所述的左视图示意图;
15.图2为本实用新型的实施例所述的正视图示意图;
16.图3为本实用新型的实施例所述的右视图示意图;
17.附图标记说明:
[0018]1‑
履带式行走机构;2
‑
底盘;3
‑
旋转机座;4
‑
z轴伸缩臂;5
‑
x轴伸缩臂;6
‑
前端气动手爪;7
‑
摄像头;8
‑
储物筐;9
‑
储气罐;10
‑
底座电机;11
‑
机座电机;12
‑
z轴电机;13
‑
x轴电机。
具体实施方式
[0019]
需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互结合。
[0020]
在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”等指示方位或位置关系为基于附图所示的方位或者位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示所指的装置和元件必须具有的特定方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0021]
在本实用新型的描述中,需要说明的是除非另有明确的规定和限定,术语“连接”应做广义理解,对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
[0022]
下面将参考附图并结合实施例来详细说明本实用新型。
[0023]
一种变电站具有异物清理功能的机器人,包括:履带式行走机构1、底盘2、旋转机座3、z轴伸缩臂4、x轴伸缩臂5、前端气动手爪6、摄像头7、储物筐8、储气罐9、底座电机10、机座电机11、z轴电机12、x轴电机13;所述履带式行走机构1与所述底盘2通过轴承相连接,所述旋转机座3与所述底盘2相连接,所述z轴伸缩臂4与所述旋转机座3相连接,所述x轴伸缩臂5与所述z轴伸缩臂4连接,所述前端气动手爪6与所述x轴伸缩臂5连接,所述摄像头7嵌于机身前部,所述储物筐8和所述储气罐9分别置于所述底盘上方。
[0024]
一种变电站具有异物清理功能的机器人的使用方法,包括以下具体实施步骤:
[0025]
使用时开机,底座电机10带动履带式行走机构1运转,使其整个机身从出发点向前运动,当摄像头7遇到异物时,底座电机10暂停运转,机座电机11运转,驱动旋转机座3旋转定位到异物所在方位,同时,z轴电机12和x轴电机13运转,分别使得x轴伸缩臂5在z轴伸缩臂4上下运动和前端气动手爪6在x轴伸缩臂5水平方向上移动,精确定位到异物所在位置,将其夹起放进储物筐8里面暂存,待异物存到一定容量或是异物收集完后回到出发点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1