机器人柔性保护机构的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种机器人柔性保护机构。
背景技术:
2.机器人在工作时,机器人的机械臂上安装有工装,通过工装夹持工件,带件工装在生产过程中,因误操作导致的碰撞或产品件无法避免的形变对机器人本体、以及关节部位产生有作用力,进而存在损坏机器人本体以及关节部位的风险,增大了生产成本。
技术实现要素:
3.本实用新型的目的是克服现有技术存在的缺陷,提供一种机器人柔性保护机构,能够避免带件工装在生产过程中,因误操作导致的碰撞或产品件无法避免的形变对机器人本体、关节产生作用力而损坏的风险。
4.为了实现上述目的,本实用新型提供如下技术方案:
5.本实用新型公开的机器人柔性保护机构,包括:
6.上连接板,其上部与工装固定连接;
7.侧连接板,其下部与机器人本体固定连接;以及
8.固连在所述侧连接板上部的柔性机构;
9.所述柔性机构中部安装有能够与所述上连接板接触的中心球;
10.所述柔性机构位于所述中心球两侧对称地布设有柔性缓冲体,所述柔性机构通过所述柔性缓冲体与所述上连接板固定连接,以便所述柔性机构柔性地吸收作用力。
11.进一步的,所述柔性缓冲体一端与所述上连接板固定连接,另一端与所述柔性机构固定连接,所述柔性缓冲体中部布设有气囊。
12.进一步的,所述柔性机构还包括底板、固连在所述底板中部的球座、以及多个分布在所述球座两侧的连接柱;
13.所述底板两端固连有所述柔性缓冲体,所述底板对应所述连接柱位置开设通孔;
14.所述球座和所述上连接板均通过圆锥形结构的安装槽与所述中心球圆线接触;
15.所述连接柱安装于所述通孔内,且所述连接柱一端与所述上连接板固定连接,所述连接柱另一固连有挡块;
16.其中,所述通孔与所述连接柱外壁之间形成有间隙。
17.进一步的,两个所述柔性缓冲体对称地布设在所述中心球两侧,且两个所述柔性缓冲体与所述中心球在同一条直线上。
18.进一步的,所述上连接板下表面开设有第一止口凹槽;
19.所述底板上表面开设有第二止口凹槽;
20.所述所述柔性缓冲体一端与所述第一止口凹槽固定连接,另一端与所述第二止口凹槽固定连接。
21.在上述技术方案中,本实用新型提供的机器人柔性保护机构,有益效果:
22.本实用新型设计的机器人柔性保护机构,包括上连接板、侧连接板,上连接板和侧连接板之间连接有柔性机构,柔性机构具有中心球和两个柔性缓冲体,该结构通过中心球有利于保证上连接板和柔性机构的底板同心同轴,以及在柔性缓冲体形变时中心球起到万向支撑上连接板的作用,通过柔性缓冲体进行浮动缓冲,有效地防止了因各种突发情况和不稳定因素带来的碰撞及形变对机器人的损坏,进而实现了保护机器人,实现了节约生产成本的目的。
附图说明
23.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
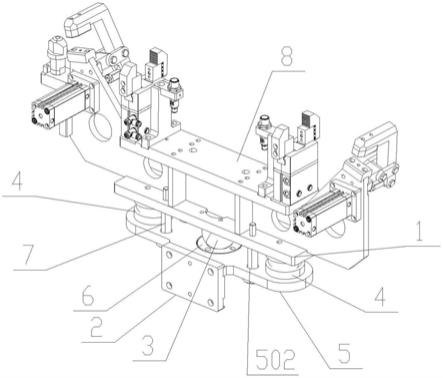
24.图1是本实用新型公开的机器人柔性保护机构的轴测图;
25.图2是本实用新型公开的机器人柔性保护机构的主视图;
26.图3是本实用新型公开的机器人柔性保护机构的左视图;
27.图4是本实用新型公开的机器人柔性保护机构安装在机器人本体上状态示意图。
28.附图标记说明:
29.1、上连接板;2、侧连接板;3、中心球;4、柔性缓冲体;5、底板;6、球座;7、连接柱;8、工装;9、机器人本体;
30.101、第一止口凹槽;
31.501、第二止口凹槽;502、通孔;
32.701、挡块。
具体实施方式
33.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
34.参见图1
‑
4所示;
35.实用新型机器人柔性保护机构,包括:
36.上连接板1,其上部与工装8固定连接;
37.侧连接板2,其下部与机器人本体9固定连接;以及
38.固连在侧连接板2上部的柔性机构;
39.柔性机构中部安装有能够与上连接板1接触的中心球3;
40.柔性机构位于中心球3两侧对称地布设有柔性缓冲体4,柔性机构通过柔性缓冲体4与上连接板1固定连接,以便柔性机构柔性地吸收作用力。
41.具体的,参见图2所示,上连接板1上部与工装8固定连接,侧连接板2下部与机器人本体9固定连接,上连接板1和侧连接板2之间连接有柔性机构;
42.柔性机构上表安装有中心球3和两个柔性缓冲体4,中心球3位于柔性机构中部,通过中心球3保证上连接板1和柔性机构同心同轴,在柔性缓冲体4受压时中心球3起到万向支撑上连接板1的作用;
43.两个柔性缓冲体4对称地布设在中心球3两侧,优选的,柔性缓冲体4一端与上连接
板1固定连接,另一端与柔性机构固定连接,柔性缓冲体4中部布设有气囊;
44.当工装8受到撞击或产品件形变时,柔性机构通过两个柔性缓冲体4进行浮动缓冲,吸收作用力保护机器人本体9不被损坏,同时,通过中心球3控制上连接板1和侧连接板2的之间的距离(z轴距离);
45.该结构中,柔性机构通过柔性缓冲体4进行浮动缓冲,有效地消除了任意方向允许范围内的变形量,从而保证了规定范围内不会有外力作用在机器人本体9和关节上,进而实现保护机器人不被损坏,节约生产成本;
46.参见图1所示;
47.优选的,柔性机构还包括底板5、固连在底板5中部的球座6、以及多个分布在球座6两侧的连接柱7;
48.底板5两端固连有柔性缓冲体4,底板5对应连接柱7位置开设通孔502;
49.球座6和上连接板1均通过圆锥形结构的安装槽与中心球3圆线接触;
50.连接柱7安装于通孔502内,且连接柱7一端与上连接板1固定连接,连接柱7另一固连有挡块701;
51.其中,通孔502与连接柱7外壁之间形成有间隙。
52.具体的,柔性机构包括底板5、球座6、四个连接柱7;
53.底板5中心位置固连有球座6,球座6和上连接板1均通过圆锥形结构的安装槽与中心球3圆线接触,进而保证底板5和上连接板1同心同轴,底板5位于球座6两侧开设有通孔502,通过通孔502安装连接柱7,四个连接柱7两个为一组对称地布设在中心球3两侧;
54.参见图2所示,连接柱7上端与上连接板1螺纹连接,并通过螺母使连接柱7固定在上连接板1上,连接柱7下端固连有挡块701,在柔性缓冲体4的气囊在不受外力时,气囊膨胀,挡块701与底板5下表面接触,连接柱7通过挡块701控制底板5和上连接板1之间的间距(z轴距离);
55.另外,当柔性缓冲体4的气囊受到外力后弹性变形,气囊形变后回弹,连接柱7通过挡块701能够阻挡底板5,防止底板5脱离连接柱7;
56.参见图2所示,底板5上开设的通孔502,通孔502与连接柱7外壁之间形成有间隙,当工装8受到外界不利因素撞击或产品件形变时,其中一个柔性缓冲体4的气囊受压,另一个柔性缓冲体4的气囊受拉,底板5和上连接板1之间形成倾斜夹角,通过通孔502与连接柱7外壁之间间隙,实现适应柔性缓冲体4的形变量;
57.优选的,两个柔性缓冲体4对称地布设在中心球3两侧,且两个柔性缓冲体4与中心球3在同一条直线上。有利于保证柔性机构稳定性;
58.参见图2所示,优选的实施例中,上连接板1下表面开设有第一止口凹槽101;
59.底板5上表面开设有第二止口凹槽501;柔性缓冲体4一端与第一止口凹槽501固定连接,另一端与第二止口凹槽501固定连接,通过第一止口凹槽101和第二止口凹槽501定位柔性缓冲体4位置。
60.在上述技术方案中,本实用新型提供的机器人柔性保护机构;
61.有益效果:本实用新型设计的机器人柔性保护机构,包括上连接板、侧连接板,上连接板和侧连接板之间连接有柔性机构,柔性机构具有中心球和两个柔性缓冲体,该结构通过中心球有利于保证上连接板和柔性机构的底板同心同轴,以及在柔性缓冲体形变时中
心球起到万向支撑上连接板的作用,通过柔性缓冲体进行浮动缓冲,有效地防止了因各种突发情况和不稳定因素带来的碰撞及形变对机器人的损坏,进而实现了保护机器人,实现了节约生产成本的目的。
62.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1