一种基于微型气泵的机器人末端吸盘
1.本实用新型涉及吸附装置技术领域,具体涉及一种基于微型气泵的机器人末端吸盘。
背景技术:
2.真空吸盘是机器人实现吸取操作的重要部件之一,在医疗、工业自动化、食品、3c等行业具有广泛的应用前景。目前机器人真空吸盘系统通常由空压机、减压阀、油水分离器、气体输送管路、控制阀的等元件组成,系统组成繁杂,不利于现场部署应用。同时,空压机工作产生的电机、气流噪音使得真空吸盘在医疗、实验室等具有静音要求的场合应用受限。因此,一种一体化集成、低噪音的真空吸盘对拓展真空吸盘的应用领域具有重要意义。
技术实现要素:
3.本实用新型的目的在于提供一种基于微型气泵的机器人末端吸盘,本实用新型的基于微型气泵的机器人末端吸盘其结构简单,采用微型气泵、微型气阀进行集成,实现了模块化设计,能够显著降低机器人吸盘系统应用部署难度。
4.本实用新型是通过如下技术方案实现的:
5.一种基于微型气泵的机器人末端吸盘,其特征在于,包括壳体、气动吸附系统和用于吸取物体的吸盘;所述的气动吸附系统设置在所述壳体的内部;所述的吸盘设置在所述壳体上且一端与所述气动吸附系统连通,另一端延伸出所述壳体;所述的壳体上设置有安装孔,所述的安装孔中设置有插头;所述的气动吸附系统包括气管、微型气泵、微型气阀和控制器;所述的气管的一端与所述微型气泵连通,另一端与所述吸盘连通;所述的微型气阀连接在所述气管上并用于控制所述气管内部与外界的连通;所述的微型气阀由所述控制器进行控制;所述的微型气泵、所述的微型气阀和所述的控制器与所述插头电性连接;所述壳体的端部还设置有若干用于与机器人连接的连接孔。所述的微型气阀主要用来控制气管内部与外界气体的连通,即当所述的微型气阀关闭时,此时所述气管的内部与外界除了所述吸盘处其余皆不通;当所述的微型气阀开启时,外界空气可以从气阀处进入到所述气管的内部。具体的,所述的吸盘、所述微型气泵、所述微型气阀通过所述气管连接,并与所述控制器共同构成气动吸附系统。通过将插头插入电源中给所述微型气泵、所述微型气阀和所述控制器供电,在物体吸取时,所述的微型气阀关闭,在所述微型气泵的作用下抽出气管中的空气,在所述气管内形成负压腔室,并通过与所述气管连通的所述吸盘实现物体的吸取。当释放物体时,通过所述控制器控制微型气阀开启,空气经过气阀流入气管中,使得气管中的负压得以消除,使得所述气管中的内外气压达到平衡,从而使得物体在自身重力作用下实现释放。
6.进一步地,所述的壳体是由下壳体和上壳体扣合而成;所述的连接孔设置为四个;所述的安装孔设置在所述上壳体上。整个壳体设计有上壳体和下壳体扣合而成,便于后期的维护更换,且安装方便。
7.进一步地,所述的下壳体和所述上壳体上分别设置有两个所述连接孔。连接孔用于将整个吸盘装置连接到外部的搬运机器人上,实现物体的快速搬运,机械化程度高。
8.进一步地,所述的插头为航空插头,且所述航空插头与所述安装孔之间密封连接。所述的微型气泵、所述微型气阀和所述控制器电气线缆通过航空插头进行供电,并由所述控制器控制所述微型气阀对物体进行吸取与释放。对所述航空插头与所述安装孔之间进行密封连接可以进一步实现防尘,可以确保本实用新型的基于微型气泵的机器人末端吸盘工作的可靠性。
9.进一步地,所述的吸盘采用硅橡胶、丁腈橡胶或聚氨酯制备而成。具体的,由硅橡胶制成的吸盘适用于吸取表面粗糙的物体;由丁腈橡胶制成的吸盘其耐油性较好且不容易被划伤;由聚氨酯材料制成的吸盘其抗老化性能较好,经久耐用。
10.本实用新型的有益效果:
11.本实用新型所提供的基于微型气泵的机器人末端吸盘,能够将微型气泵、微型气阀、气动回路(气管)和控制器有机整合,形成模块化应用方案,不需要现场部署空压机、减压阀、油水分离器、气体输送管路,能够有效降低机器人末端吸盘应用部署难度。
12.本实用新型所提供的基于微型气泵的机器人末端吸盘,其结构简单,制作成本较低,将微型气泵、微型气阀、气管以及控制器都集成整合到了壳体的内部,使得整个装置的体积更小;同时本实用新型的基于微型气泵的机器人末端吸盘使用时更安静,没有噪音污染。
附图说明
13.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域的技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
14.图1为本实用新型的基于微型气泵的机器人末端吸盘的外观图;
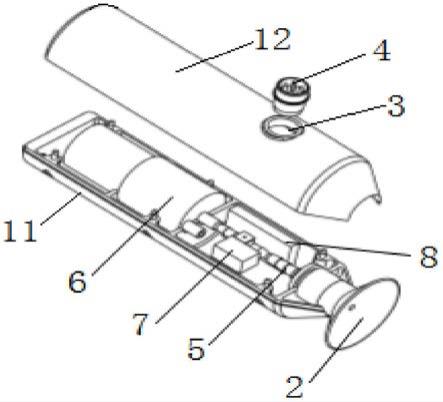
15.图2为本实用新型的基于微型气泵的机器人末端吸盘的结构示意图;
16.图3为本实用新型的基于微型气泵的机器人末端吸盘的使用图。
17.图中:1壳体、2吸盘、3安装孔、4插头、5气管、6微型气泵、7微型气阀、8控制器、9连接孔、11下壳体、12上壳体、13物体、14机器人、15法兰。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.实施例1
20.如图1
‑
2所示,一种基于微型气泵的机器人末端吸盘,包括壳体1、气动吸附系统和用于吸取物体13的吸盘2;所述的气动吸附系统设置在所述壳体1的内部;所述的吸盘2设置
在所述壳体1上且一端与所述气动吸附系统连通,另一端延伸出所述壳体1;所述的壳体1上设置有安装孔3,所述的安装孔3中设置有航空插头4,且所述航空插头4与安装孔3之间进行密封连接,实现防尘;所述的气动吸附系统包括气管5、微型气泵6、微型气阀7和控制器8;所述的气管5的一端与所述微型气泵6连通(微型气泵6抽取气管5中的空气使其内部产生负压腔),另一端与所述吸盘2连通;所述的微型气阀7连接在所述气管5上并用于控制所述气管5内部与外界的连通;所述的微型气阀7由所述控制器8进行控制;所述的微型气泵6、所述的微型气阀7和所述的控制器8与所述航空插头4电性连接,通过航空插头4连接电源对微型气泵6、微型气阀7和控制器8进行供电;所述壳体1的端部还设置有四个用于与机器人连接的连接孔9。
21.优选地,上述的壳体1是由下壳体11和上壳体12扣合而成;所述的下壳体11和所述上壳体12的端部分别设置有两个所述连接孔9,通过在所述的连接孔9中连接螺栓可以将壳体1(即本实用新型的基于微型气泵的机器人末端吸盘)安装于机器人14末端的法兰15上;所述的安装孔3设置在所述上壳体12上。优选地,所述的吸盘2采用硅橡胶、丁腈橡胶或聚氨酯制备而成,可根据吸取物体13的不同选用合适材料制成的吸盘2;由硅橡胶制成的吸盘适用于吸取表面粗糙的物体;由丁腈橡胶制成的吸盘其耐油性较好且不容易被划伤;由聚氨酯材料制成的吸盘其抗老化性能较好,经久耐用。
22.在实际使用过程中:首先通过机器人14将本实用新型基于微型气泵的机器人末端吸盘转运至需要吸取物体13上方,并使所述吸盘2与待吸取物体13的表面接触。如图3所示,物体13吸取时:通过控制器8使微型气阀7闭合,空气不会从微型气阀7处进入到气管5内,然后开启所述微型气泵6抽取所述气管5中的气体,使其内部形成负压腔(因为此时吸盘2与物体13的表面接触,所以在微型气泵6抽气时吸盘2的吸口处被物体13封闭不会漏气或者漏气较少,微型气泵6抽气后气管5内部容易形成负压腔),在大气压的作用下吸盘2将物体13吸取,并通过机器人14将吸取后的物体13搬运到指定的地方。将物体13搬运到制得地方后开始释放物体13:释放物体13时,通过控制器8使微型气阀7开启,然后外界空气从微型气阀7处进入到气管5的内部,空气进入使得气管5内部原先的负压消除,气管5内外气压达到平衡,物体13在自身重力作用下自然释放。
23.本实用新型提供的基于微型气泵的机器人末端吸盘,不需要现场部署空压机、减压阀、油水分离器、气体输送管路,能够有效降低机器人末端吸盘应用部署难度,且由于没有空压机的使用本实用新型吸盘的使用过程更加安静,减少了噪音污染。
24.上述为本实用新型的较佳实施例仅用于解释本实用新型,并不用于限定本实用新型。凡由本实用新型的技术方案所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1