一种适合易燃易爆场景下的分布式能源仿人机器人的制作方法
1.本发明涉及机器人技术领域,尤其涉及一种适合易燃易爆场景下的分布式能源仿人机器人。
背景技术:
2.机器人是人们对科学技术不断发展而出现的产物。在现代社会里,机器人大多都出现在生产流水线上,代替人工从事繁重而又重复性的工作,比如搬运机器人、焊接机器人等。这些机器人的特点是,充分利用了机器人的双臂功能进行工作,而头部和双腿技术没有或稍有开发,使得机器人技术含量不高,不能感知、思考、判断和行走,只能固定不动,进行原地操作和工作。
3.近年来,随着科学技术的发展,尤其是人工智能的发展,机器人被赋予了聪明和智慧,出现了很多先进的机器人,最有代表性的就是人形机器人。
4.目前,大部分人形机器人都是使用电机系统,利用电机和轴承模拟人的关节,使用电力直接进行驱动。初级一点的,人形机器人身上外联着电缆,行走时电缆跟着走,行走范围有限;高级一点的,人形机器人身背一个大电池包,既增加了人形机器人的重量,也占用了有限空间。由于它们驱动单元都是电机系统,使用电力直接进行驱动,人形机器人的力量有限。比如公开号:cn105583856b:一种试仿人机器人。它公开了一种试仿人机器人,被试仿人机器人包括躯干,驱动系统、感知系统和控制系统,躯干包括骨骼、四肢、关节和适当的身体软组织,骨骼和所述四肢组成架构,关节是连接不同机器人构件或部位,身体软组织能起到机器人构件间的连接和缓冲作用;驱动系统使用电机系统用来驱动躯干各机器人构件运动。这种机器人,虽然基本满足了人形机器人的特征,可以感知周围环境,做出人的简单动作,但由于驱动单元都是电机系统,使用电力直接进行驱动,人形机器人的力量有限。另外,由于设计和制作时没有考虑隔爆防爆要求,因此这种机器人不适合在煤矿井下或地面具有易燃易爆的场景下使用。
技术实现要素:
5.本发明的目的在于提供一种适合易燃易爆场景下的分布式能源仿人机器人,具备人的大部分行动功能,不仅应用在一般场景,还可以服务于煤矿井下或地面具有易燃易爆的场景。
6.为了实现上述目的,提供了一种适合易燃易爆场景下的分布式能源仿人机器人,包括:相连接的,
7.头部,其包括感知系统,所述头部单独设有供电单元;
8.躯干,其包括计算机,所述计算机由所述供电单元供电;
9.四肢,所述四肢的左臂、右臂、左腿及右腿上均对应设有1个供电单元;
10.及控制系统,其包括视觉系统,液压系统,所述躯干、四肢及关节由所述液压系统驱动;
11.其中,所有供电单元均包括本安电源。
12.可选地,所述躯干上配置有4个供电单元与所述所述四肢的左臂、右臂、左腿及右腿的供电单元相配合给所述液压系统供电以驱动所述分布式能源仿人机器人四肢的双臂、双腿和躯干的各个关节。
13.可选地,所述感知系统包括:
14.温度传感器、湿度传感器,所述温度传感器用来测定感知温度变化;所述湿度传感器用来感知空气、地面或机器人构件的湿度变化。
15.可选地,所有供电单元均包括锂电池或石墨烯电池。
16.可选地,所述视觉系统包括立体摄像机,测距装置,所述立体摄像机用来模拟机器人的眼睛,捕捉机器人所处的境况、检测视觉范围内物体及识别物体运动和方向,所述测距装置用于测量出所遇到的障碍物及其距离,并传输实时数据给躯干的计算机,通过人工智能系统,准确判断和感知前方情况。
17.可选地,所述分布式能源仿人机器人还包括照明设备,为机器人行走提供照明或作为运行的指示灯。
18.可选地,所述分布式能源仿人机器人还包括步态控制系统,用于保持机器人的身体平衡,所述步态控制系统具体包括:
19.地面反作用力控制单元:以控制脚底适应不平整地面,使机器人稳定的站立;
20.目标控制单元:以使机器人无法站立时,控制机器人双臂反向运动,以使机器人保持平衡;
21.落脚点控制单元:用于调节每步的间距以满足机器人的位置、速度和步长之间的关系。
22.可选地,所述液压系统包括:
23.压力传感器,用于监测液压系统的液压缸驱动关节的力和脚部与地面的接触力,所述分布式能源仿人机器人的双臂关节和双腿关节均由所述液压系统驱动。
24.可选地,所述控制系统还包括,热管理系统,用于调节机器人各组成部分的温度。
25.可选地,所述分布式能源仿人机器人的骨架使用钛合金或铝合金3d打印而成。
26.本发明至少包括以下有益效果:
27.本发明针对现有人形机器人的使用条件和不足,使用分布式本安电源,采用液压驱动四肢、躯干及关节,使它的手具有精细动作技能的能力,能负重,能独立行走,感知周围环境,做出正确判断,具备人的大部分行动功能,不仅应用在一般场景,还可以服务于煤矿井下或地面具有易燃易爆的场景。
附图说明
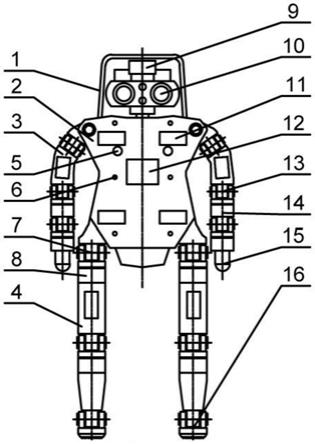
28.图1为本发明一种实施例的一种适合易燃易爆场景下的分布式能源仿人机器人的结构示意图;
29.图2为本发明一种实施例的控制系统的结构示意图。
30.图中,1、头部;2、躯干;3、右臂;4、右腿;5、大灯;6、小灯;
31.7、下肢弯曲关节;8、下肢转动关节;9、测距装置;10、立体摄像机;
32.11、供电单元;12、计算机;13、上肢弯曲关节;14、上肢转动关节;15、手;16、脚;17、
视觉系统;18、热管理系统;19、感知系统;20、照明设备;21、双臂各个关节;22、双腿各个关节;23、躯干的各个关节;24、液压系统;25、远程控制端;26、温度传感器;27、湿度传感器;28、步态控制系统;29、地面反作用力控制单元;30、目标控制单元;31落脚点控制单元。
具体实施方式
33.在本公开的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"竖直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本公开和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。
34.此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本公开的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本公开中的具体含义。
35.煤矿井下或地面具有易燃易爆场合的电气设备国家有隔爆性能强制性规定,因此在这种场合使用的人形机器人不能使用电缆连接方式进行实时供电,同样,让人形机器人身背一个大电池包作为动力能源,也不符合有关规定。根据国家标准,电气设备电压等级大于24v的必须使用隔爆电气,电压等级为24v或12v使用本质安全电气。隔爆电气必须具有隔爆功能,电气元件或设备被放置在密闭的壳体里,壳体要耐得过内部爆炸冲击,因此无论是外形,还是设备重量都增加很多。若在煤矿井下或地面具有易燃易爆场合使用的人形机器人上使用此类隔爆电源,会将机器人做得很臃肿,失去了人形机器人的基本特征和使用意义。同样,国家对本安电源有容量限制要求,因此,机器人也不能使用集中式本安电源。这样,电源就成为制约煤矿井下或地面具有易燃易爆场合机器人的最大因素。同时,电机系统作为驱动单元,使用电力直接进行驱动,人形机器人的力量变得非常有限,满足不了使用要求。
36.为此,如图1
‑
2所示,
37.本发明实施例提供了一种适合易燃易爆场景下的分布式能源仿人机器人,分布式能源仿人机器人外形是一款双足双手人形机器人,由头部1、躯干2、双臂和双腿组成,与人体相似,具体包括:相连接的,
38.头部1,其包括感知系统19,所述头部19单独设有供电单元11;
39.躯干2,其包括计算机12,所述计算机12由所述供电单元11供电;
40.四肢,所述四肢的双臂、双腿、大腿及小腿均对应设有4个供电单元11;其中,所述四肢的左臂、右臂、左腿及右腿上均对应设有1个供电单元。
41.及控制系统,其包括视觉系统17,液压系统24,所述躯干、四肢及关节由所述液压系统24驱动。
42.本发明实施例针对现有人形机器人的使用条件和不足,使用分布式本安电源,采
用液压系统24驱动四肢的双臂各个关节21、双腿各个关节22、躯干的各个关节23,使它的手具有精细动作技能的能力,能负重,能独立行走,不仅应用在一般场景,还可以服务于煤矿井下或地面具有易燃易爆的场景。
43.在一些实施例中,所述躯干2上配置有4个供电单元11,所述躯干11上配置有4个供电单元与所述所述四肢的左臂、右臂3、左腿及右腿4的供电单元相配合给所述液压系统24供电以驱动所述分布式能源仿人机器人四肢的双臂、双腿和躯干2的各个关节。
44.在一些实施例中,所述感知系统19包括:
45.温度传感器26、湿度传感器27,所述温度传感器26用来测定感知温度变化;所述湿度传感器27用来感知空气、地面或机器人构件的湿度变化。
46.在一些实施例中,所述供电单元可以包括锂电池、石墨烯电池,具体种类不做限定,电池组合方式也不做限定,例如,所述供电单元11均包括锂电池;例如供电单元可以部分为锂电池,部分为石墨烯电池,电池容量也不做限定,例如,所述锂电池可以是一个直流24v,容量为100wh的快充型锂电池,未来,随着技术的进步,新的安全快充电池出现,容量可以提高,在此也不做限定。
47.在一些实施例中,所述视觉系统17包括立体摄像机10,测距装置9,所述立体摄像机10用来模拟机器人的眼睛,捕捉机器人所处的境况、检测视觉范围内物体及识别物体运动和方向,所述测距装置9用于测量出所遇到的障碍物及其距离,并传输实时数据给躯干的计算机,通过人工智能系统,准确判断和感知前方情况。其中,测距装置9可以为激光测距仪或激光雷达。
48.在一些实施例中,所述分布式能源仿人机器人还包括照明设备20,为机器人行走提供照明或作为运行的指示灯,所述照明设备20可包括大灯5,用于提供照明、小灯6作为警示灯或运行的指示灯。
49.可选地,所述分布式能源仿人机器人还包括步态控制系统28,用于保持机器人的身体平衡,所述步态控制系统28具体包括:
50.地面反作用力控制单元29:以控制脚底适应不平整地面,使机器人稳定的站立;
51.目标控制单元30:以使机器人无法站立时,控制机器人双臂反向运动,以使机器人保持平衡;
52.落脚点控制单元31:用于调节每步的间距以满足机器人的位置、速度和步长之间的关系。
53.在一些实施例中,所述液压系统24包括:
54.压力传感器,用于监测液压系统24的液压缸驱动关节的力和脚16与地面的接触力,所述分布式能源仿人机器人的双臂关节和双腿关节均由所述液压系统24驱动。
55.在一些实施例中,所述控制系统还包括,热管理系统18,用于调节机器人各组成部分的温度。
56.在一些实施例中,所述分布式能源仿人机器人的骨架使用钛合金或铝合金3d打印而成。具有结构紧凑、强度高、刚性好和重量轻的特点,可以有效减轻机器人的重量,提高机器人身体的强度和刚性。
57.下面以一较优的实施例对本发明的有益效果进行说明:
58.本实施例所述的分布式能源仿人机器人和人体相似,由骨架支撑,液压器件作为
各关节连接而成,所述液压器件由液压系统24驱动,骨架使用钛合金加工或使用轻型材料3d打印而成,具有结构紧凑、强度高、刚性好和重量轻的特点,可以有效减轻机器人的重量,提高机器人身体的强度和刚性。
59.分布式能源仿人机器人的能量来自各供电单元11,在本实施例中机器人中,共布置有9个本安电源(供电单元)11,详见图1。电源的核心部分是一个直流24v,容量为100wh的快充型锂电池(未来,随着技术的进步,新的安全快充电池出现,容量可以提高),具体来讲,头部单独使用一个本安电源11,所述四肢的双臂、双腿、大腿及小腿均对应设有4个供电单元11;其中,所述四肢的左臂、右臂、左腿及右腿上均对应设有1个供电单元,所述躯干2上配置有4个供电单元11,所述躯干11上配置有4个供电单元与所述所述四肢的左臂、右臂3、左腿及右腿4的供电单元相配合给所述液压系统24供电以驱动所述分布式能源仿人机器人四肢的双臂、双腿和躯干2的各个关节。
60.如图2所示,采用液压系统24驱动四肢的双臂各个关节21、双腿各个关节22、躯干的各个关节23,使它的手具有精细动作技能的能力,能负重,能独立行走,不仅应用在一般场景,还可以服务于煤矿井下或地面具有易燃易爆的场景。
61.分布式能源仿人机器人全身共有28个自由度,而且全部由液压驱动实现,具体表现在:
62.1.单腿3个自由度:小腿纵向自由度,大腿纵向自由度,胯部横向自由度;
63.2.单脚踝2个自由度:横向和纵向自由度。通过双液压缸的联合驱动能够实现纵向、横向、斜向三种运动状态,这三种运动状态可增强行走过程中单腿支撑时腿部的运动能力;
64.3.腰腹2个自由度:轴向和径向自由度;
65.4.单臂6个自由度:肩部轴向和径向自由度,大臂轴向和径向自由度,小臂轴向和径向自由度;
66.5.腕部和机械手:各1个自由度。
67.分布式能源仿人机器人头部除了有一个本安电源11之外,还安装了一个立体摄像机10、一个激光测距仪或激光雷达(测距装置9),还有多种传感和感知器件。
68.立体摄像机10用来模拟人的两个眼睛,再加上一个激光测距仪9共同组成视觉感知系统。立体摄像机10用于捕捉机器人所处的外界情况,检测出前面的物体,采用感觉算法,识别物体运动和方向;激光测距仪9可以快速测量出所遇到的障碍物及其距离,并将数据实时传递给计算机12,通过人工智能系统,准确判断和感知前方情况。
69.由于煤矿井下和地面具有易燃易爆的地方等场合情况特殊,在机器人头部还安装有温度传感器26、湿度传感器27等感知器件,感知周围环境,以满足特殊使用要求。
70.分布式能源仿人机器人躯干2是一个重要部件,它上连头部1,中连双臂,下连双腿。在躯干2中央,是一台具有人工智能的计算机12,作为机器人的大脑。计算机12使用头部的本安电源(供电单元)11供电。所述四肢的双臂3、双腿4均对应设有4个本安电源11;
71.在机器人的胸前,安装蓝光led照明设备,为机器人行走提供照明,也可以作为警示灯或运行的指示灯。
72.分布式能源仿人机器人的四肢由所述液压系统24驱动,四肢都有髋关节、膝关节和足关节,四肢躯干上包含液压器件关节以及各种传感器、液压系统24和热管理系统18。
73.分布式能源仿人机器人有两只灵巧的手15,手15各关节由液压装置驱动,具有多个自由度,它的手具有精细动作技能的能力,并且可以换装不同功能的机械手。通过液压系统驱动上肢弯曲关节13、上肢转动关节14,双臂可以沿着不同的方向旋转,灵活度好,可以抓取一定重量的物件,也可操控小型机械。
74.分布式能源仿人机器人在计算机实时控制下,通过液压系统驱动下肢弯曲关节7、下肢转动关节8,双腿可以像人类一样直立行走,而且可以单腿站立,可以实现向前直行、转向等功能。并可通过远程控制端25基于4g/5g技术对所述分布式能源仿人机器人远程控制。
75.分布式能源仿人机器人除了改变脚16的位置和转向外,也可以自如的改变步幅。可以向多个方向行走,移动自然。
76.分布式能源仿人机器人可以实现步态控制。具体来讲,可以实现三个控制:
77.地面反作用力控制单元29:以控制脚底适应不平整地面,使机器人稳定的站立;
78.目标控制单元30:以使机器人无法站立时,控制机器人双臂反向运动,以使机器人保持平衡;
79.落脚点控制单元31:用于调节每步的间距以满足机器人的位置、速度和步长之间的关系。如果分布式能源仿人机器人失去平衡有可能跌倒,以上三个控制单元将起作用,以防止跌倒,并继续保持行走的状态。
80.分布式能源仿人机器人具有完整的液压系统,所述液压系统除了具有常规的蓄能器(用于缓冲补油,吸收系统压力冲击和波动,补充瞬时流量提高频响)、风冷机(用于回油冷却)、过滤器(为伺服系统净化液压油)、安全阀(保护液压系统)、卸荷阀(用于系统泄压)、插装溢流阀(用于压力调节)、流量计(流量监测)、压力传感器(监测液压系统控制压力)、温度传感器(油温监测)外,管路使用旋转接头进行连接,除此之外,液压系统还安装力传感器,用于监测液压缸驱动关节的力和脚部与地面的接触力。
81.分布式能源仿人机器人控制系统的核心是位于躯干中央的一台具有人工智能的计算机12,相当于机器人的大脑。所述计算机12使用头部的本安电源11供电。分布式能源仿人机器人的控制系统结构图如图2所示,身体的各个部分由实时计算机控制,以保证机器人的运动协调,实现各种功能。
82.分布式能源仿人机器人有一套热管理系统,关键技术之一是热管理系统18与发动机运行的匹配技术以及系统优化控制策略的选择问题。热管理系统18控制对象包括水泵转速、电控节温器阀门开度以及冷却风扇转速等。可以根据发动机实际工作和试验情况,依据系统优化原则来制定智能化电控热管理系统控制策略,使发动机在不同工况下均工作在最佳温度范围,很好地管理机器人各个部分的温度。
83.最后应说明的是:以上各实施例仅用以说明本公开的技术方案,而非对其限制;尽管参照前述各实施例对本公开进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本公开各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1