一种二自由度差分式机械臂关节模块
1.本发明涉及一种二自由度差分式机械臂关节模块,属于医疗机器人领域。
背景技术:
2.医疗机器人的机械臂由于应用于手术室且直接和人体接触,有其独特的要求。其中一个要求是机械臂要细长,且机械臂伸直时是一条直线,这样能最大程度的降低机械臂自身对医生(或医生的助手)视野的阻挡。为了保证机械臂外形细长又有较强的动力输出,其关节设计至关重要。差分机构具有结构紧凑、受力均匀、承载能力强等特点,本专利采用差分机构的方案实现大扭矩紧凑型机械臂关节。
3.专利cn 106182071a提出了一种二自由度差分关节模块的设计方案。该专利采用齿轮连接电机输出,并采用4个等径锥齿轮的方法实现差分传动。专利cn106182071a技术的缺点。1、误差大:cn 106182071a采用电机输出端直接连接减速箱,减速之后再通过齿轮传递扭矩到锥齿轮(即电机
‑
减速器
‑
齿轮)。这样一方面没有考虑消除齿轮间隙的措施,另一方面,该方案是减速后连接齿轮,这样齿轮的误差直接传递到输出端。2:十字交叉轴承受较强负载造成该轴易坏,cn 106182071a的十字交叉轴输出端直接与齿轮通过键固连,承受所有负载,造成该轴易损坏。3、精度较低:输出端(等径锥齿轮处)没有编码器,不能检测实际输出端的角度,这样传动机构的误差不能检测出来。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,本发明提供一种二自由度差分式机械臂关节模块,采用同步带方案,同步带可以消除间隙并且将同步带放在减速器之前(即电机
‑
同步带
‑
减速器),可以减小误差,另外,比起齿轮传动,同步带传动的另一个好处是质量轻。
5.技术方案:为解决上述技术问题,本发明的一种二自由度差分式机械臂关节模块,包含第一动力源和第二动力源,所述第一动力源和第二动力源安装在支架上,第一动力源和第二动力源分别与第一小同步带轮和第二小同步带连接,在支架上还安装有差分传动机构,差分传动结构包含主动锥齿轮组、被动锥齿轮组和十字交叉轴,十字交叉轴包含垂直设置的第一支撑轴和第二支撑轴,主动锥齿轮组包含两个对称设置的主动锥齿轮,被动锥齿轮组包含两个对称设置的被动锥齿轮,两个主动锥齿轮分别通过减速器与第一大同步轮和第二大同步轮连接,第一小同步带轮和第二小同步通过同步带与第一大同步轮和第二大同步轮连接,两个主动锥齿轮分别与两个被动锥齿轮啮合,第一大同步轮、第二大同步轮、减速器和两个主动锥齿轮安装在第一支撑轴上,两个被动锥齿轮安装在第二支撑轴上,被动锥齿轮与连接盘固定连接,一个连接盘与输出连杆的一端固定连接,输出连杆的另一端与法兰盘连接,法兰盘套在第二支撑轴上,法兰盘紧贴连接盘;当主动锥齿轮组的两个锥齿轮等速同向转动时,输出连杆连同被动锥齿轮组一起绕第一支撑轴转动而相对千支架俯仰运动;当主动锥齿轮组的两个锥齿轮等速异向转动时,输出连杆绕第二支撑轴转动而相对支
架偏摆运动;当主动锥齿轮组的两个锥齿轮异速转动时,输出连杆在连同被动锥齿轮组一起绕第一支撑轴转动而相对支架俯仰运动的同时还绕第二支撑轴转动而相对支架偏摆的复合运动。
6.作为优选,所述支架包含本体,本体上设有两个空腔,第一动力源和第二动力源分别放置空腔内,本体上延伸有一对套环,套环与壳体固定连接,在壳体上设有凹槽,凹槽内安装有减速器,减速器的柔性齿圈与主动锥齿轮连接,动力通过大同步轮依次传递到减速器和主动锥齿轮。
7.作为优选,所述十字交叉轴包含第一支撑块和第二支撑块,第一支撑块的两侧延伸有第一支撑轴,第二支撑块的两侧延伸有第二支撑轴,第一支撑轴和第二支撑轴设有贯穿的通孔。
8.作为优选,所述第一支撑块和第二支撑块为块状结构,第一支撑块和第二支撑块通过紧固件连接。
9.作为优选,所述差分结构位于支撑筒内,第一支撑块两侧延伸有支撑件,支撑件固定按在支撑筒内。
10.作为优选,所述第一动力源和第二动力源的电机位无框电机,无框电机上安装有霍尔和磁编码器。
11.在本发明中,十字交叉轴,现有技术中大都是通过外壳安装输出轴承,我们是采用十字轴组件,本组件拆分为5部分,以便于加工,并使用止口保证同轴度和垂直度。比现有技术基准方式精度高,而且本发明的外壳容易拆装便于检修锥齿轮。
12.有益效果:本发明的二自由度差分式机械臂关节模块,我们采用同步带方案,同步带可以消除间隙并且将同步带放在减速器之前(即电机
‑
同步带
‑
减速器)。同理,假设减速器的减速比为100,采用电机
‑
同步带
‑
减速器的方案,理论上误差也能减小100倍,另外,比起齿轮传动,同步带传动的另一个好处是质量轻;针对十字交叉轴承受较强负载的问题,我们采用完全不同的轴系结构,锥齿轮通过轴承安装在支架上,轴系全部悬浮不承受任何扭矩;针对精度低的问题,我们采用在输出齿轮上添加编码器,并通过中空的十字交叉轴走线;为了紧凑,电机使用无框电机,带有两套编码器,分别是霍尔和磁编码器,并带有抱闸,使得在电机不工作时,电机轴可以锁死,使得机器人保持同一个姿态,电机轴较长,一端输出(通过同步带轮)另一端连接抱闸、磁编码器,抱闸采用如下零件与电机轴连接,能自动适应安装偏差,另外编码器一部分包络在抱闸内部空间内,可保证紧凑的轴向尺寸。同时,伺服驱动器也集成在模组上。
附图说明
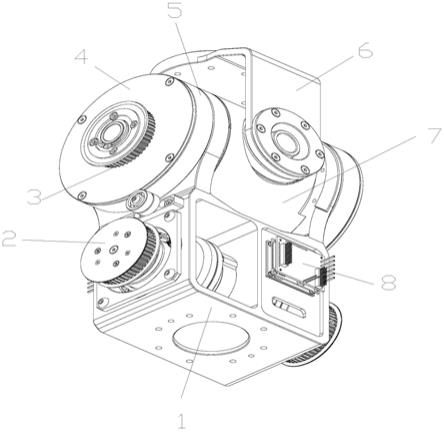
13.图1为本发明的结构示意图。
14.图2为本发明不含支架的结构示意图。
15.图3为支架的结构示意图。
16.图4为差分结构的示意图。
17.图5为第一支撑轴的结构示意图。
18.图中:1支架;2第一小同步轮;3第一大同步轮;4轮罩;5壳体;6输出连杆;7支撑筒;8电机驱动器;9主动锥齿轮;10被动锥齿轮;11连接盘;12调节轮;13第一支撑轴;14第二支
撑轴;15第一支撑块;16第二支撑块;17支撑件。
具体实施方式
19.下面结合附图对本发明作更进一步的说明。
20.如图1所示,本发明的二自由度差分式机械臂关节模块,主要包括支架1、第一动力源、第二动力源、两套皮带传送装置、两个主动锥齿轮9、两个被动锥齿轮10、十字交叉轴和输出连杆6。
21.第一动力源和第二动力源完全一样,均通过电动驱动器驱动。第一动力源和第二动力源分别包含电机,电机为无框电机,电机外套有电机壳体5,电机壳体5固定在支架1内,电机底部通过抱闸结构与支架1连接。所述支架1包含本体,本体上设有两个空腔,第一动力源和第二动力源分别放置空腔内,本体上延伸有一对套环。电机上带有两套编码器,分别为霍尔和磁编码器,电机轴较长,电机轴的端部与小同步轮连接,电机底部连接有抱闸和磁编码器。
22.在本发明中,第一小同步轮2和第一大同步轮3与第二小同步轮和第二大同步轮均通过同步带连接,在支架上安装有调节轮12,调节皮带的松紧。在支架上安装有。支架1的一对套环分别与壳体5固定连接,在壳体5上设有凹槽,凹槽为阶梯槽,凹槽内安装有减速器,减速器通过轮罩4固定在壳体5内,减速器的刚性部分与壳体5固定连接,减速器的柔性齿圈与主动锥齿轮9的连接件连接,动力通过大同步轮依次传递到减速器和主动锥齿轮9。主动锥齿轮9与连接件固接,连接件通过轴承安装在套环内。
23.在本发明中,十字交叉轴包含第一支撑块15和第二支撑块16,第一支撑块15的两侧延伸有第一支撑轴13,第二支撑块16的两侧延伸有第二支撑轴14,第一支撑轴13和第二支撑轴14设有贯穿的通孔。由于第一支撑轴和第二支撑轴为空心轴,在空心轴内可走线,在被动锥齿轮上可设置编码器,检测出实际输出端的角度,传动结构的误差能检测出来。在制作时,优先第一支撑块15和第二支撑块16分别加工完成后组成。也可采用整体加工的方法,一体成型十字交叉轴,保证第一支撑轴13和第二支撑轴14内部设有贯穿的通孔。在分开加工时,第一支撑块15和第二支撑块16加工为平面结构,精度能够保证要求,第一支撑块15和第二支撑块16通过紧固件固定连接在一起。通过第一支撑块15和第二支撑块16,保证了第一支撑轴和第二支撑轴的同轴度以及垂直度。
24.在本发明中,第一支撑轴13上依次套有第一大同步轮3、谐波减速器、两个主动锥齿轮9、另一个谐波减速器和第二大同步轮,第一大同步轮3、第二大同步轮通过轴承安装在第一支撑轴13上,并通过轴承盖固定,轴承盖为卡箍结构。两个主动锥齿轮9和两个被动锥齿轮10均通过轴承安装在十字交叉轴上,该轴承为薄壁轴承,可以减小整个结构的径向尺寸。
25.在本发明中,输出连杆6为u型结构,可通过钣金件折弯制成,也可通过机加工加工形成。连接盘11通过紧固件与被动锥齿轮10和输出连杆6连接,u形状的输出连杆6同时起到压紧被动锥齿轮10的作用。支撑件17的顶部为弧形结构,在支撑筒7内安装有固定块,固定块与支撑件17固定连接,起到固定整个十字交叉轴的作用。支撑筒7为薄壁结构,主要为保护差分结构。被动锥齿轮10上安装有第二次编码器,用于输出角度的测试。
26.本发明在工作时,电机驱动器8驱动电机转动,电机转动带动第一小同步轮2和第
二小同步轮转动,通过同步带带动大同步轮转动,大同步轮同时与减速器连接,减速器带动主动锥齿轮9转动,主动锥齿轮9带动被动锥齿轮10转动,从而带动输出连杆6转动。当主动锥齿轮9组的两个锥齿轮等速同向转动时,输出连杆6连同被动锥齿轮10组一起绕第一支撑轴13转动而相对千支架1俯仰运动;当主动锥齿轮9组的两个锥齿轮等速异向转动时,输出连杆6绕第二支撑轴14转动而相对支架1偏摆运动;当主动锥齿轮9组的两个锥齿轮异速转动时,输出连杆6在连同被动锥齿轮10组一起绕第一支撑轴13转动而相对支架1俯仰运动的同时还绕第二支撑轴14转动而相对支架1偏摆的复合运动。
27.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1