一种机器人360度碰撞防护系统及其方法与流程
一种机器人360度碰撞防护系统及其方法
1.本申请是申请日为2018年6月19日,申请号为cn201810632080.0的发明名称为一种基于不倒翁原理的机器人360度碰撞防护装置的分案申请。
技术领域
2.本发明涉及机器人领域,具体地说是一种机器人360度碰撞防护系统及其方法。
背景技术:
3.机器人在移动时通常采用传感器对障碍物进行探测,从而避开障碍物放置碰撞,但传感器容易存在盲区,机器人还是有可能发生碰撞,造成经济损失。
4.目前机器人碰撞防护装置在采用两根转轴异面垂直设置来带动机器人转动减轻对机器人的碰撞,但两根转轴异面垂直设置的结构存在缺陷,在四个45度斜方向遇到碰撞时可能无法进行转动,对机器人造成损伤,无法360度对机器人进行防护。
技术实现要素:
5.本发明的主要目的在于克服现有技术的不足,提供一种机器人360度碰撞防护系统及其方法。
6.本发明采用如下技术方案来实现:一种机器人360度碰撞防护系统及其方法,其结构包括缓冲装置、保护罩、底座、移动轮,所述底座底部设有移动轮,所述底座内设有电机,所述电机与移动轮传动连接,所述底座上安装有缓冲装置,所述缓冲装置设在保护罩内,所述保护罩上下面不封口且底部与底座相连接,所述缓冲装置由不倒机构、支撑装置、传动装置、接触装置、同步装置、支撑座组成,所述支撑座连接在底座上,所述支撑座上与不倒机构相连接,所述不倒机构与接触装置相连接,所述不倒机构侧面设有支撑装置,所述支撑装置通过传动装置与同步装置相连接。
7.作为优化,所述不倒机构由弧形板、定位杆、挂耳、配重块组成,,所述弧形板的外侧连接有两个相互对称定位杆,所述定位杆水平放置,所述定位杆与支撑装置相接触,所述弧形板的外表面均匀分布有成圆形的八个挂耳,八个挂耳位于弧形板的同一横截面上,所述弧形板底部设有配重块,所述弧形板设在支撑座上。
8.作为优化,所述支撑座由定位槽、弹簧、座体、支架组成,所述座体顶部中间开设有定位槽,所述定位槽内安装有弹簧,所述弹簧与弧形板相连接,所述座体底部为弧形,所述座体两侧通过支架与底座相连接。
9.作为优化,所述接触装置由拉绳、动触片、移动块、静触片、连接杆组成,所述拉绳设有八条,八条拉绳的一端均与移动块相连接,八条拉绳的另一端分别系在八个挂耳上,所述拉绳与座体的弧形底部贴合,所述移动块位于座体底部中间,所述移动块连接有动触片,所述静触片为上下不封口的圆柱状,所述动触片设在静触片的内部,所述静触片两侧通过连接杆与支架相连接。
10.作为优化,所述支撑装置由顶升杆板、齿条、滑槽、弹性块、滑轨、强力弹簧组成,所
述顶升杆板的两侧分别垂直连接有两条齿条,所述齿条两侧分别开设有滑槽,所述齿条通过滑槽与滑轨滑动连接,所述齿条的底部背面设有弹性块,所述齿条底部与底座之间连接有强力弹簧,所述强力弹簧设在滑轨中间,所述齿条与传动装置相啮合。
11.作为优化,所述保护罩内侧设有卡块,所述卡块为直角三角形,所述卡块与弹性块相配合,所述弹性块为直角三角形,所述卡块的锐角与弹性块的锐角相对。
12.作为优化,所述传动装置由齿轮、连接轴、主动转轮、传动带、从动转轮组成,所述齿轮与齿条相啮合,所述齿轮通过连接轴与主动转轮相连接,所述主动转轮通过传动带与从动转轮传动连接,所述从动转轮与同步装置活动连接。
13.作为优化,所述同步装置由中间齿轮、同步齿轮、第一皮带轮、皮带、第二皮带轮、转轴组成,所述中间齿轮的两侧分别与同步齿轮相啮合,所述中间齿轮与第一皮带轮为同心圆且两者固定连接,所述第一皮带轮通过皮带与第二皮带轮传动连接,所述第二皮带轮通过转轴与从动转轮相连接。
14.作为优化,所述弧形板的形状为椭圆形的一半,且降低重心,提高稳定性,便于自动复位。
15.作为优化,所述拉绳八条的长短一致,使移动块保持在中间位置。
16.作为优化,所述定位槽的的直径为5
‑
8cm,便于对弧形板进行定位。
17.有益效果
18.本发明在使用时,将机器人安装在配重块上,底座内的电机及缓冲装置的动触片、静触片与机器人电连接,机器人控制移动轮进行行走,当遇到障碍物时,机器人通过弧形板能够进行缓冲倾倒,通过弹簧防止弧形板脱离支撑座,通过弧形板倾倒时挂耳连接的八条拉绳拉动动触片移动,使动触片与静触片相接触进行通电对机器人的控制中枢发出指令,使机器人控制移动轮往反方向移动,通过弧形板与配重块设计实现不倒翁的原理,能够使机器人进行自动复位,当弧形板倾倒时通过定位杆将顶升杆板下压,通过齿条、齿轮的及同步装置的配合传动使顶升杆板两端进行同步运动,通过强力弹簧的作用能够对齿条进行快速复位,通过惯性能够使弹性块升到卡块上方,通过卡块进行定位,通过顶升杆板将两个定位杆进行水平顶升,对弧形板进行定位,避免移动时晃动产生误判。
19.与现有技术相比,本发明的有益效果是:弧形板与配重块实现不倒翁的原理,能够防止机器人倾倒,使机器人在碰撞后能够进行自动复位,且能够进行360度的碰撞缓冲防护,减少机器人的损伤;顶升板与两个定位杆的配合能够对弧形板起到定位的作用,减少弧形在移动时产生的晃动,卡块与弹性块的形状设计便于弹性块卡设在卡设上方,能够对顶升板起到固定的效果,弧形板与座体卡设的定位槽相配合能对弧形板起到一定的固定效果,避免移动时晃动产生误判。
附图说明
20.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
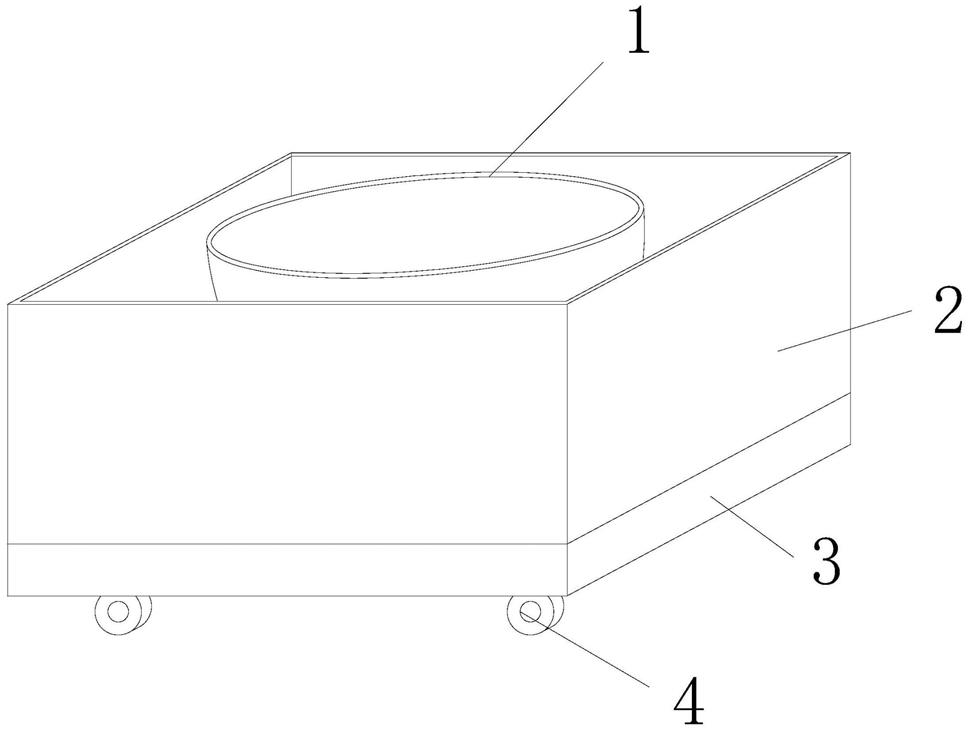
21.图1为本发明一种机器人360度碰撞防护系统及其方法的结构示意图。
22.图2为本发明缓冲装置的结构示意图。
23.图3为本发明缓冲装置的细化结构示意图。
24.图4为本发明缓冲装置的遇到障碍物的工作状态图。
25.图5为本发明八条拉绳的仰视图。
26.图中:缓冲装置1、保护罩2、底座3、移动轮4、不倒机构10、支撑装置11、传动装置12、接触装置13、同步装置14、支撑座15、弧形板101、定位杆102、挂耳103、配重块104、定位槽151、弹簧152、座体153、支架154、拉绳130、动触片131、移动块132、静触片133、连接杆134、顶升杆板110、齿条111、滑槽112、弹性块113、滑轨114、强力弹簧115、卡块20、齿轮120、连接轴121、主动转轮122、传动带123、从动转轮124、中间齿轮140、同步齿轮141、第一皮带轮142、皮带143、第二皮带轮144、转轴145。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.请参阅图1
‑
5,本发明提供一种机器人360度碰撞防护系统及其方法技术方案:其结构包括缓冲装置1、保护罩2、底座3、移动轮4,所述底座3底部设有移动轮4,所述底座3内设有电机,所述电机与移动轮4传动连接,所述底座3上安装有缓冲装置1,所述缓冲装置1设在保护罩2内,所述保护罩2上下面不封口且底部与底座3相连接,所述缓冲装置1由不倒机构10、支撑装置11、传动装置12、接触装置13、同步装置14、支撑座15组成,所述支撑座15连接在底座3上,所述支撑座15上与不倒机构10相连接,所述不倒机构10与接触装置13相连接,所述不倒机构10侧面设有支撑装置11,所述支撑装置11通过传动装置12与同步装置14相连接,所述不倒机构10由弧形板101、定位杆102、挂耳103、配重块104组成,所述弧形板101的外侧连接有两个相互对称定位杆102,所述定位杆102水平放置,所述定位杆102与支撑装置11相接触,所述弧形板101的外表面均匀分布有成圆形的八个挂耳103,八个挂耳103位于弧形板101的同一横截面上,所述弧形板101底部设有配重块104,所述弧形板101设在支撑座15上,所述支撑座15由定位槽151、弹簧152、座体153、支架154组成,所述座体153顶部中间开设有定位槽151,所述定位槽151内安装有弹簧152,所述弹簧152与弧形板101相连接,所述座体153底部为弧形,所述座体153两侧通过支架154与底座3相连接,所述接触装置13由拉绳130、动触片131、移动块132、静触片133、连接杆134组成,所述拉绳130设有八条,八条拉绳130的一端均与移动块132相连接,八条拉绳130的另一端分别系在八个挂耳103上,所述拉绳130与座体153的弧形底部贴合,所述移动块132位于座体153底部中间,所述移动块132连接有动触片131,所述静触片133为上下不封口的圆柱状,所述动触片131设在静触片133的内部,所述静触片133两侧通过连接杆134与支架154相连接,所述支撑装置11由顶升杆板110、齿条111、滑槽112、弹性块113、滑轨114、强力弹簧115组成,所述顶升杆板110的两侧分别垂直连接有两条齿条111,所述齿条111两侧分别开设有滑槽112,所述齿条111通过滑槽112与滑轨114滑动连接,所述齿条111的底部背面设有弹性块113,所述齿条111底部与底座3之间连接有强力弹簧115,所述强力弹簧115设在滑轨114中间,所述齿条111与传动装置12相啮合,所述保护罩2内侧设有卡块20,所述卡块20为直角三角形,所述卡块20与弹性块113相配合,所述弹性块113为直角三角形,所述卡块20的锐角与弹性块113的锐角相
对,所述传动装置12由齿轮120、连接轴121、主动转轮122、传动带123、从动转轮124组成,所述齿轮120与齿条111相啮合,所述齿轮120通过连接轴121与主动转轮122相连接,所述主动转轮122通过传动带123与从动转轮124传动连接,所述从动转轮124与同步装置14活动连接,所述同步装置14由中间齿轮140、同步齿轮141、第一皮带轮142、皮带143、第二皮带轮144、转轴145组成,所述中间齿轮140的两侧分别与同步齿轮141相啮合,所述中间齿轮140与第一皮带轮142为同心圆且两者固定连接,所述第一皮带轮142通过皮带143与第二皮带轮144传动连接,所述第二皮带轮144通过转轴145与从动转轮124相连接,所述弧形板101的形状为椭圆形的一半,所述拉绳130八条的长短一致,所述定位槽151的的直径为5
‑
8cm。
29.在使用时,将机器人安装在配重块104上,底座3内的电机及缓冲装置1的动触片131、静触片133与机器人电连接,机器人控制移动轮4进行行走,当遇到障碍物时,机器人通过弧形板101能够进行缓冲倾倒,通过弹簧152防止弧形板101脱离支撑座15,通过弧形板101倾倒时挂耳103连接的八条拉绳130拉动动触片131移动,使动触片131与静触片133相接触进行通电对机器人的控制中枢发出指令,使机器人控制移动轮4往反方向移动,通过弧形板101与配重块104设计实现不倒翁的原理,能够使机器人进行自动复位,当弧形板101倾倒时通过定位杆102将顶升杆板110下压,通过齿条111、齿轮120的及同步装置14的配合传动使顶升杆板110两端进行同步运动,通过强力弹簧115的作用能够对齿条111进行快速复位,通过惯性能够使弹性块113升到卡块20上方,通过卡块20进行定位,通过顶升杆板110将两个定位杆102进行水平顶升,对弧形板101进行定位,避免移动时晃动产生误判。
30.本发明相对现有技术获得的技术进步是:弧形板与配重块实现不倒翁的原理,能够防止机器人倾倒,使机器人在碰撞后能够进行自动复位,且能够进行360度的碰撞缓冲防护,减少机器人的损伤;顶升板与两个定位杆的配合能够对弧形板起到定位的作用,减少弧形在移动时产生的晃动,卡块与弹性块的形状设计便于弹性块卡设在卡设上方,能够对顶升板起到固定的效果,弧形板与座体卡设的定位槽相配合能对弧形板起到一定的固定效果,避免移动时晃动产生误判。
31.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1