带有记忆功能的自动化机器人的制作方法
1.本发明涉及自动化机器人,特别涉及带有记忆功能的自动化机器人,属于机器人技术领域。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.根据中国专利号为“cn105304084b”公开了“一种实现机器人记忆主人强相关信息的方法”,通过vsm向量空间模型将自然语音中的有关主人的强相关信息转化为特征向量并储存于本地,当主人在此询问其相关信息时,机器人就会向量机相似度原则检索储存于本地的语句,检索到后把句子截取输出给用户答案。通过本发明所述的方法,实现了机器人的记忆功能,在与主人进行闲聊时,还能对主人的一些相关信息记录。
4.目前的机器人只能输入单一的执行程序,不具备记忆功能,需要人为的改变程序来改变机器人的工作,因此需要设计带有记忆功能的自动化机器人。
技术实现要素:
5.本发明的目的在于提供带有记忆功能的自动化机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:包括机器人主体,所述机器人主体底部的中心处安装有控制箱,所述控制箱分别内部安装有总处理器和记忆芯片,所述总处理器与控制箱之间设置有固定机构,所述机器人主体底部的一侧固定安装有操作程序输入模块,所述操作程序输入模块和记忆芯片均与总处理器电性连接;
7.所述记忆芯片内部封装有记忆执行程序写入单元、记忆执行程序查询单元、记忆执行程序删除单元和记忆执行程序存储单元,所述记忆执行程序写入单元对新输入的执行程序写入至记忆芯片内部,记忆执行程序查询单元对存储的记忆执行程序进行查询,确定操作执行程序正确,记忆执行程序删除单元对不满足执行需求的记忆程序进行删除,记忆执行程序存储单元包括记忆执行程序a、记忆执行程序b、、、记忆执行程序n,对输入的多个记忆程序程序进行存储;
8.所述总处理器内部封装有指令发送模块、指令接收模块、指令处理模块、程序处理模块和程序执行模块,总处理器可采用atmel的8位mcu,型号为at89s52。
9.作为本发明的一种优选技术方案,所述指令发送模块,对程序执行的结果发送至对应的驱动设备,通过驱动设备控制自动化机器人执行相应的操作。
10.作为本发明的一种优选技术方案,所述指令接收模块将远程控制器发送的光信号转换为电信号,并将转换的电信号发送至指令处理模块。
11.作为本发明的一种优选技术方案,所述指令处理模块对转换的电信号进行分析处理,并根据处理的结果调用记忆芯片中的记忆执行程序。
12.作为本发明的一种优选技术方案,所述程序处理模块对操作程序输入的模块进行分析判断是否满足需求,对调用记忆程序程序进行分析处理。
13.作为本发明的一种优选技术方案,所述程序执行模块,对调取的程序进行运行并,对程序运行的结果发送至成型处理模块中。
14.作为本发明的一种优选技术方案,所述操作程序输入模块包括初始执行程序的写入,对不完善程序进行修改和对无法满足需求的程序进行删除操作。
15.作为本发明的一种优选技术方案,所述固定机构包括两根正反丝杆、四个滑块、伺服电机、两个限位板、链条和两个齿轮组成,所述控制箱内壁的两侧均开设滑槽,两个所述滑槽的内部均滑动连接有两个滑块,位置对正的两个所述滑块之间固定安装有限位板,两个所述滑槽的两侧槽壁通过嵌设的轴承转动连接有正反丝杆,所述正反丝杆的两端与位于同一滑槽的两个滑块中部螺纹连接,两根所述正反丝杆的一端均固定安装有齿轮,两个所述齿轮之间传动连接有链条,其中一个所述滑槽的槽壁开设有电机槽,所述电机槽的内部固定安装有伺服电机,所述伺服电机的输出轴与对应正反丝杆一端端头处固定连接,所述伺服电机与总处理器电性连接。
16.作为本发明的一种优选技术方案,两个所述限位板一侧的中部均开设有限位槽,所述限位槽的内部滑动连接有两个限位块,两个所述限位块一侧的边角处固定安装有固定板,两个所述限位块一侧的另一边角处螺纹连接有螺栓。
17.作为本发明的一种优选技术方案,两个所述限位板的内部均开设有环形冷却槽,所述环形冷却槽的内部填充有冷却液,所述控制箱的一侧绞接由密封门。
18.与现有技术相比,本发明的有益效果是:
19.1.本发明带有记忆功能的自动化机器人,通过在机器人的内部安装记忆芯片,通过在记忆芯片中植入多种控制记忆执行程序,机器人在操作的过程中,通过控制记忆执行程序对机器人操作步骤进行读写,并将读写的程序写入至记忆芯片中,当需要使用时直接通过远程控制器输入指令后即可调节机器人运行记忆程序,达到记忆效果。
20.2.本发明带有记忆功能的自动化机器人,通过伺服电机的转动带动正反丝杆的转动,两根正反丝杆之间通过齿轮与链条传动连接,从而带动两根正反丝杆的转动,通过正反丝杆的转动带动两个滑块闭合,通过滑块的移动带动限位板的移动,通过限位板对总处理器进行限位固定,保证机器人在工作的过程中总处理器的稳定性。
附图说明
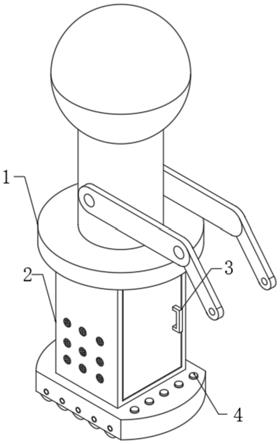
21.图1为本发明结构示意图;
22.图2为本发明的控制箱内部结构示意图;
23.图3为本发明的限位板结构示意图;
24.图4为本发明的限位板内部结构示意图;
25.图5为本发明的模块框图;
26.图6为本发明的流程框图;
27.图7为本发明的总处理器框图。
28.图中:1、机器人主体;2、控制箱;3、密封门;4、操作程序输入模块;5、滑槽;6、正反丝杆;7、滑块;8、伺服电机;9、限位板;10、链条;11、齿轮;12、总处理器;13、固定板;14、螺栓;15、限位槽;16、限位块;17、环形冷却槽。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.请参阅图1
‑
7,本发明提供了带有记忆功能的自动化机器人的技术方案:
31.根据图1
‑
7所示,包括机器人主体1,机器人主体1底部的中心处安装有控制箱2,控制箱2分别内部安装有总处理器12和记忆芯片,总处理器12与控制箱2之间设置有固定机构,机器人主体1底部的一侧固定安装有操作程序输入模块4,操作程序输入模块4和记忆芯片均与总处理器电性连接,通过记忆芯片中植入记忆执行程序对机器人操作指令进行获取读写,实现机器人记忆功能,在使用时直接输入指令即可,无需吸入操作程序;
32.记忆芯片内部封装有记忆执行程序写入单元、记忆执行程序查询单元、记忆执行程序删除单元和记忆执行程序存储单元,记忆执行程序写入单元对新输入的执行程序写入至记忆芯片内部,记忆执行程序查询单元对存储的记忆执行程序进行查询,确定操作执行程序正确,记忆执行程序删除单元对不满足执行需求的记忆程序进行删除,记忆执行程序存储单元包括记忆执行程序a、记忆执行程序b、、、记忆执行程序n,对输入的多个记忆程序程序进行存储;
33.总处理器内部封装有指令发送模块、指令接收模块、指令处理模块、程序处理模块和程序执行模块,总处理器可采用atmel的8位mcu,型号为at89s52;
34.指令发送模块:对程序执行的结果发送至对应的驱动设备,通过驱动设备控制自动化机器人执行相应的操作;
35.指令接收模块:将远程控制器发送的光信号转换为电信号,并将转换的电信号发送至指令处理模块;
36.指令处理模块:对转换的电信号进行分析处理,并根据处理的结果调用记忆芯片中的记忆执行程序;
37.程序处理模块:对操作程序输入的模块进行分析判断是否满足需求,对调用记忆程序程序进行分析处理;
38.程序执行模块:对调取的程序进行运行并,对程序运行的结果发送至成型处理模块中。
39.操作程序输入模块:包括初始执行程序的写入,对不完善程序进行修改和对无法满足需求的程序进行删除操作。
40.固定机构包括两根正反丝杆6、四个滑块7、伺服电机8、两个限位板9、链条10和两个齿轮11组成,控制箱2内壁的两侧均开设滑槽5,两个滑槽5的内部均滑动连接有两个滑块7,位置对正的两个滑块7之间固定安装有限位板9,两个滑槽5的两侧槽壁通过嵌设的轴承转动连接有正反丝杆6,正反丝杆6的两端与位于同一滑槽5的两个滑块7中部螺纹连接,两
根正反丝杆6的一端均固定安装有齿轮11,两个齿轮11之间传动连接有链条10,其中一个滑槽5的槽壁开设有电机槽,电机槽的内部固定安装有伺服电机8,伺服电机8的输出轴与对应正反丝杆6一端端头处固定连接,伺服电机8与总处理器12电性连接,通过伺服电机8的转动带动正反丝杆6的转动,通过正反丝杆6的转动带动两个滑块7的分离和闭合,通过滑块7的分离和闭合带动限位板9的移动,便于对总处理器12进行限位固定,两个限位板9一侧的中部均开设有限位槽15,限位槽15的内部滑动连接有两个限位块16,两个限位块16一侧的边角处固定安装有固定板13,两个限位块16一侧的另一边角处螺纹连接有螺栓14,两个限位板9的内部均开设有环形冷却槽17,环形冷却槽17的内部填充有冷却液,便于加速总处理器12工作散出的热量,控制箱2的一侧绞接由密封门3。
41.具体使用时,本发明带有记忆功能的自动化机器人,当机器人在工作的过程中,首先初始化闪存,进入对记忆芯片写入状态,接着通过记忆芯片中的执行程序读取机器人在操作过程中执行的操作指令,将执行的操作指令存入至记忆芯片中进行存储,当需要调用时,通过远程控制器发送记忆芯片中存储的执行程序,机器根据调用的操作程序重复记忆的操作流程。
42.在本发明的描述中,需要理解的是,指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
43.在本发明中,除非另有明确的规定和限定,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
44.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1