一种爬杆机器人的制作方法
1.本发明属于工业机器人技术领域,具体涉及一种用于管道维护的爬杆机器人。
背景技术:
2.高空作业在人们的生活中出现的越来越普遍,高空作业具有较高的复杂性和危险性,工作人员往往需要架设吊绳或者工程车到达预定高度的位置,前期准备工作繁琐,作业环境存在高危性和不确定性,且过程成本高昂,效率较低。考虑到高空作业的危险性,用于代替工作人员进行作业的爬杆机器人的应用需求越来越迫切。输油管道、输气管道、自来水管道等各种管道的维护作业越来越普遍,其中大多数管道中都含有高温、高压、有毒物质,爬杆机器人逐渐成功代替人工进行检修做业。目前爬杆机器人的研究相对比较成熟,已有的爬杆机器人可分为滚动式爬杆机器人、夹持式爬杆机器人、仿生式爬杆机器人、吸附式爬杆机器人。现有的爬杆机器人如授权号为cn203172752u的中国专利公开的一种爬杆机器人,主要依靠安装在支座上驱动滚轮进行爬杆动作,驱动滚轮有三组,三组驱动轮和支座形成c形,并且在内部形成供管体穿过的通道。爬杆机器人抱紧在杆体上,步进电机驱动滚轮转动,实现爬杆机器人以不同的运动方式在管体上运动,工作方式灵活多变。不过,由于采用滚轮实现的运动,往往会造成滚轮和管体壁面之间的摩擦力不足,机器人的承载能力有限,并且当遇到管道有接口或一些其它障碍物时,无法自动或者遥控其越过障碍,实现爬壁的连续性从而不具有工业应用的前景,不具备避障功能。
3.在沿竖直方向爬行的过程中,需要爬杆机器人与管道之间具有较大的摩擦力以控制爬杆机器人自重以防止其受到重力失控下行。
技术实现要素:
4.本发明的目的在于提供一种新型攀爬方式的机器人,在爬壁过程如果遇到障碍,能够通过改变运动模式,实现避障功能,具有较好的通过性和实用性。
5.本发明采用的技术方案如下:一种爬杆机器人,包括电源、第一臂和中间连接臂,第一转动机构和第二转动机构分别安装在中间连接臂的两端,第一臂的一端和中间连接臂的一端经第一转动机构相连,第一夹持机构的一端与第一臂的另一端经第二转动机构相连,第二夹持机构的一端与中间连接臂的另一端经第三转动机构相连,第一转动机构、第二转动机构、第三转动机构的转轴相互平行,电源和控制元件安装在第一臂的中部。
6.进一步的,第一臂包括都上连接框和下连接框,上连接框和下连接框之间固连,第一转动机构和第二转动机构均安装在上连接框和下连接杆之间。
7.进一步的,第一夹持机构包括两个摇臂,两个摇臂的一端对称安装在第三转动机构输出端的两端,第三转动机构带动摇臂绕其一端轴线转动,两个摇臂下部分别安装在电机安装板的两侧,夹爪控制电机安装在电机安装板的上端面且位于两个摇臂之间,两根连接杆分别对称固定在电机安装板下部的两端,两个齿条分别滑动设置在两根连接杆相对的内侧,齿轮设置在电机安装板的下端面,夹爪控制电机带动齿轮转动,齿轮的两侧分别与两
个齿条啮合,夹爪上部与齿条固连。
8.进一步的,齿条与连接杆之间通过导向组件相连,导向组件包括导轨和滑块,导轨固定在连接杆上,滑块嵌套在导轨上,滑块与齿条固连。
9.进一步的,一侧齿条下部设置两个夹爪,另一侧齿条下部设置一个夹爪,两侧夹爪沿垂直于连接杆的水平轴线方向投影不重合。
10.进一步的,夹爪的内侧设置成v型开口。
11.进一步的,夹爪的内侧设有永磁体。
12.进一步的,电源采用直流输出电源,第一转动机构、第二转动机构和第三转动机构均采用直流电机进行驱动,第一夹持机构和第二夹持机构均采用直流电机进行驱动,第一夹持机构和第二夹持机构的夹持部均设置压力传感器,通过设定压力传感器阈值,可调节夹爪的夹持力。
13.进一步的,爬杆机器人具有两种运动模式,分别蠕动运动模式和翻越运动模式,蠕动运动模式的控制方法如下:第一夹持机构夹紧管壁,第二夹持机构松开管壁,第二转动机构带动第一臂朝向靠近管壁方向转动,第一臂与中间连接臂之间的夹角减小,第二夹机构夹紧管壁,第一夹持机构松开管壁,第二转动机构中间连接臂朝向远离管壁方向转动,第一臂与中间连接臂之间的夹角变大,第一夹持机构夹紧管壁;翻越运动模式的控制方法如下:第一夹持机构夹紧管壁,第二夹持机构松开管壁,第一转动机构带动第一夹持机构相对中间连接臂朝向远离管壁的方向转动度,同时第三转动机构带动第一臂相对于第一夹持机构朝向远离管壁的方向转动,带动第二夹持机构沿爬壁方向运动到第一夹持机构的前方,第一臂约转动至到与管壁平行时,同时第三转动机构带动第一臂相对于第一夹持机构朝向靠近管壁的方向转动,第二夹持机构夹紧管壁。
14.本方案具有如下的技术效果:(1)第一夹持机构和第二夹持机构的夹持部内部设置压力传感器,实时传输所读取的压力值并进行反馈,保护夹爪控制电机不过载,保证爬杆机器人的正常运行。在夹爪内部设置永磁体,可以降低压力传感器的阈值,降低夹爪控制电机的输出功率,实现夹爪控制电机的闭环控制,可以有效的缓解夹爪控制电机过度所产生的危害。当压力传感器到达一定值时,压力转换的摩擦力将平衡与爬杆机器人本身的重力,从而实现爬杆机器人的平衡;(2)第一夹持和第二夹持机构中两侧夹爪沿连接杆的水平轴线方向投影不重合,即两侧夹爪在爬壁时沿管壁的轴线方向不重合。在夹持管径较小的管道时,第一夹持机构中两侧夹爪从两侧对管壁进行饱合,防止两侧夹爪的前端相互接触导致干涉,从而第一夹持机构能够适应更宽管径范围的管道;(3)翻越运动模式和蠕动运动爬行相结合,能够保证爬行效率,同时能够实现有效避障,实现爬行的连续性。
附图说明
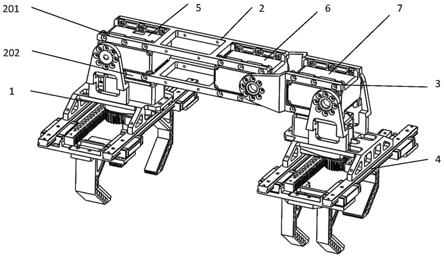
15.图1 为本发明装置的立体结构示意图。
16.图2 为本发明装置中第一夹持机构的立体结构示意图。
17.图3 为本发明装置中第一夹持机构另一视角的结构示意图。
18.图4 为本发明装置中蠕动运动模式的结构动态示意简图。
19.图5 为本发明装置中翻越运动模式的结构动态示意简图。
20.图中:1.第二夹持机构;2.第一臂;201.上连接框;202.下连接框;3.中间连接臂;
4.第一夹持机构;401.摇臂;402.电机安装板;403.夹爪控制电机;404.齿轮;405.齿条;406.夹爪;407.连接杆;408.导向组件;5.第二转动机构;6.第一转动机构;7.第三转动机构。
具体实施方式
21.如图1
‑
图5所示,一种爬杆机器人,包括电源、第一臂2和中间连接臂3,第二转动机构5和第一转动机构6分别安装在中间连接臂3的两端,第一臂2的一端和中间连接臂3的一端经第二转动机构5相连,第一夹持机构1的一端与第一臂2的另一端经第一转动机构6相连,第二夹持机构4的一端与中间连接臂3的另一端经第三转动机构7相连,第二转动机构5、第一转动机构6、第三转动机构7的转轴相互平行,电源和控制元件安装在中间连接臂3的中部。
22.第一臂2包括都上连接框201和下连接框202,上连接框201和下连接框202之间固连,第一臂2采用分体式设计,上连接框201和下连接框202之间空心,减少了爬杆机器人本体自身的质量, 在沿竖直方向爬行时,减少自重能够降低对第一夹持机构1和第二夹持机构4与管壁之间摩擦力的要求,即减少了第一夹持机构1和第二夹持机构4中驱动元件最大能提供动力的要求;而且为第二转动机构5、第一转动机构6、第三转动机构7、电源以及必备的控制元件的安装提供空间,保证了机器人在翻滚爬行运动中重心紧贴杆体。
23.第一夹持机构1包括两个摇臂101,两个摇臂101的一端对称安装在第三转动机构7输出端的两端,第三转动机构7带动摇臂101绕其一端轴线转动,两个摇臂101下部分别安装在电机安装板102的两侧,夹爪控制电机103安装在电机安装板102的上端面且位于两个摇臂101之间,两根连接杆107分别对称固定在电机安装板102下部的两端,两个齿条105分别滑动设置在两根连接杆107相对的内侧,齿轮104设置在电机安装板102的下端面,夹爪控制电机103带动齿轮104转动,齿轮104的两侧分别与两个齿条105啮合,夹爪106上部与齿条105固连。
24.第一夹持机构1整体关于第三转动机构7输出端对称设置,夹爪控制电机103采用对称布置的齿轮齿条机机构带动两侧夹爪106相对运动从而保证了两侧夹爪106运动的同步性和中心性。
25.齿条105与连接杆107之间通过导向组件108相连,导向组件108包括导轨和滑块,导轨固定在连接杆107上,滑块嵌套在导轨上,滑块与齿条105固连,导向组件108一方面为齿条105的运动进行导向,另一方面对齿条105的稳定性进行支撑。
26.一侧齿条105下部设置两个夹爪106,另一侧齿条105下部设置一个夹爪106,两侧夹爪106沿垂直于连接杆107的水平轴线方向投影不重合。两侧夹爪106沿连接杆107的水平轴线方向投影不重合,即两侧夹爪106在爬壁时沿管壁的轴线方向不重合。在夹持管径较小的管道时,第一夹持机构1中两侧夹爪106从两侧对管壁进行饱合,防止两侧夹爪106的前端相互接触导致干涉,从而第一夹持机构1能够适应更宽管径范围的管道。
27.夹爪106的内侧设置成v型开口,v型开口能够适应现有的管道形状。夹持106的内侧设有永磁体,利用永磁体与管道之间的相互吸附力,从而增大第一夹持机构1、第二夹持机构4与管壁之间的压力,从而提供较大的摩擦力,减少第一夹持机构1、第二夹持机构4中夹爪106与管壁之间的夹持力,防止夹爪控制电机103过载发热,保证爬杆机器人的正常运
行。
28.爬杆机器人夹爪106的内侧,即第一夹持机构1和第二夹持机构4的夹持部内部设置压力传感器,实时传输所读取的压力值并进行反馈,保护夹爪控制电机103不过载,保证爬杆机器人的正常运行。在夹爪106内部设置永磁体,可以降低压力传感器的阈值,降低夹爪控制电机103的输出功率,实现夹爪控制电机103的闭环控制,可以有效的缓解夹爪控制电机103过度所产生的危害。当压力传感器到达一定值时,压力转换的摩擦力将平衡与爬杆机器人本身的重力,从而实现爬杆机器人的平衡。
29.电源采用直流输出电源,第二转动机构5、第一转动机构6和第三转动机构7均采用直流电机进行驱动,第一夹持机构1和第二夹持机构4均采用直流电机进行驱动,第一夹持机构1和第二夹持机构4的夹持部均设置压力传感器,通过设定压力传感器阈值,可调节夹爪106的夹持力。硬件控制系统以stm32f103zet6为核心器件,本系统的电源分别将12v转换为5v、3.3v给直流电机和控制芯片进行供电;采用直流电机和直流输出电源,减少电源和电机自身的重量,从而减少爬杆机器人的自重,提高运动的灵活性。
30.如图4、图5所示,爬杆机器人具有两种运动模式,分别蠕动运动模式和翻越运动模式,翻越运动模式的动作过程如下:初始状态时,第一臂2与中间连接臂3位于相互平行,沿爬行运动方向位于前部的第一夹持机构1时,第二夹持机构4松开管壁,第一夹持机构1夹紧管壁,第一转动机构5带动第一夹持机构1相对中间连接臂3朝向远离管壁的方向转动180度,同时第三转动机构7带动第一臂2相对于第一夹持机构1朝向远离管壁的方向转动,带动第二夹持机构4沿爬壁方向运动到第一夹持机构1的前方,第一臂2约转动至到与管壁平行时,第三转动机构7带动第一臂2相对于第一夹持机构1朝向靠近管壁的方向转动,第二夹持机构4夹紧管壁。第一转动机构6中转轴与第二转动机构5中转轴的距离设为l1,第一转动机构中转轴与第三转动机构中转轴的距离设为l2,翻越运动模式中,翻越单步的距离为l3=l2+l1。蠕动运动模式调节能够调节位于爬行方向前部的夹持机构与管壁的夹持位置,即向上爬行时,位于上部的夹持机构,向下爬行时,位于下部的夹持机构。从而改变另一个夹持机构的落点位置,从而避过管道凸起,防止爬行机器人掉落。
31.在竖直爬行过程中,第一夹持机构1和第二夹持机构4交替位于下方,位于下方的夹持机构松开管壁,然后相对另一个夹持机构朝向远离管壁的方向转动,上方夹持机构与其转动连接的连接臂相对转动,将下方夹持机构翻转到另一个夹持机构的上方,从而实现在管壁上一步爬行。沿管壁下行的运动过程,与上述过程相反。
32.蠕动运动模式的控制方法如下:第一夹持机构1夹紧管壁,第二夹持机构4松开管壁,第二转动机构6带动第一臂2朝向靠近管壁方向转动,第一臂2与中间连接臂3之间的夹角减小,第二夹机构5夹紧管壁,第一夹持机构1松开管壁,第二转动机构6中间连接臂3朝向远离管壁方向转动,第一臂2与中间连接臂3之间的夹角变大,第一夹持机构1夹紧管壁,第一转动机构6改变第一臂2与中间连接臂3之间的相对角度,第一转动机构6的转动范围为0
‑
180度之间,优选的为0
‑
90度之间,类似昆虫在枝干上的蠕动爬行。蠕动运动模式下上述动作过程为一个蠕动单步,蠕动单步的距离较小。当第一夹持机构1位于爬行方向的前部时,主要是为了调节第一夹持机构1,即位于爬行方向上部的夹持机构在管壁上的夹持位置。
33.翻越运动模式和蠕动运动模式相结合,能够保证爬行效率,同时能够实现有效避障,实现爬行的连续性。
34.上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1