网状结构的大承载多指型软体机械手
1.本发明属于机器人末端执行器技术领域,涉及一种软体机械手,具体地说,涉及一种网状结构的大承载多指型软体机械手。
背景技术:
2.传统工业机器人的末端机械手大都为刚性夹爪形式,在对目标物体的抓取作业中,能够实现稳、准、快的工作效果,已在分拣、装配、制造等领域中获得广泛应用。但是,此类机械手的抓取对象通常为形状规则的物体,当抓取对象为异形物体时,其抓取效果往往不尽人意,此外其刚性结构在抓取易碎物品时往往会造成物体破损,带来不必要的经济损失。
3.随着机械手技术的发展,软体机械手应运而生。由于软体机械手的材料特性在理论上具有无限多自由度,可以依靠其形状的改变实现对各种形状物体的良好包覆,并且基于软体材料硬度低的特点,其在抓取过程中也能确保物体不受损伤。
4.软体机械手对物体的抓取主要通过弹性变形实现,其工作模式通常表现为平面弯曲及径向或轴向伸缩,工作过程中可根据目标物体被动改变自身几何形状。公开号为cn107718021a的中国专利公开了一种气动多指型软体机械手,该机械手主要由三个分段式软体手指加保持架构成,各手指均可实现大范围弯曲变形,并实现物体的抓取。但是,由于其气动驱动方式,工作气压低,导致这类机械手存在负载能力较低的问题。公开号为cn109746933a的中国专利公开了一种基于气压驱动的封闭式软体机械手,其主要包括增强型气囊和柔性保持架,通过对气囊充气使软体机械手径向收缩进而完成对物体的抓取,其负载能力较大且柔性保持架可以起到对易碎品的保护作用,但是其可抓取尺寸受保持架几何尺寸限制,不能抓取大尺寸物体。
技术实现要素:
5.鉴于上述原因,本发明的目的是提供一种网状结构的大承载多指型软体机械手。该软体机械手具有抓取范围大、抓取负载力强的特点。
6.为实现上述目的,本发明采用以下技术方案:一种网状结构的大承载多指型软体机械手,其包括刚性保持架、至少三只软体手指单元和驱动绳索;所述软体手指单元伞状地固定在所述刚性保持架上,所述驱动绳索将各所述软体手指单元彼此穿连在一起,编织成网状结构,并在所述驱动绳索的作用下,所述软体手指单元展开或闭合,实现物体的抓取;
7.所述软体手指单元内嵌有至少一条0.3
‑
1mm厚度的薄片型弹簧钢板,在软体机械手呈展开状态时,所述软体手指单元自然伸直呈网状结构,在软体机械手呈闭合状态时,所述软体手指单元弯曲呈圆弧型,整体构型呈封闭的笼子形状。
8.优选地,所述软体手指单元包括软体手指,所述软体手指呈镊子形状,其开口端为末端,与所述刚性保持架相连,其闭合端为执行端;所述弹簧钢板贯穿所述软体手指的闭合端和开口端;在所述软体手指两条夹臂之间增设有若干条加强筋;在所述软体手指的夹臂
上间隔地开有若干个第一穿线孔。
9.优选地,所述驱动绳索为钢丝绳索,其以缠绕式或交叉式的穿线方式将所述各软体手指单元穿连在一起,编织成网状结构。
10.优选地,所述刚性保持架包括叠加设置的顶盖、中间连接件和底座;所述顶盖包括用于与工业机械臂机构连接的法兰盘和用于压固所述软体手指开口端的压板;所述软体手指的第一个夹臂插在所述顶盖和所述中间连接件之间,第二个夹臂插在所述中间连接件和所述底座之间,所述顶盖、中间件和底座通过长螺栓紧固在一起。
11.优选地,所述软体手指每个夹臂的末端均开有用于固定的通孔;所述中间连接件上开有用于放置所述夹臂末端的凹槽,在所述凹槽内设有用于卡固所述软体手指夹臂末端通孔的凸台;所述底座上开有用于放置所述夹臂末端的底座凹槽,在所述底座凹槽内设有用于卡固所述软体手指夹臂末端通孔的底座凸台。
12.优选地,在所述中间连接件内设有走线通道;在所述中间连接件的顶部设有第二穿线孔,所述驱动绳索经所述第二穿线孔自由穿入穿出所述刚性保持架。
13.优选地,所述第一穿线孔和所述第二穿线孔内均设有导线套。
14.本发明的工作过程如下:自然状态下,软体手指单元张开,将目标物体罩在中心部位,拉动驱动绳索,软体手指单元弯曲将目标物体包裹实现抓持功能;移动软体机械手,待到指定位置时,放松驱动绳索,软体手指单元张开,将物体放下,至此一个工作流程结束。
15.本发明与现有技术相比具有如下优点:
16.本发明既具有抓取空间大的优点,又具有负载能力强的特点,还能依靠自身材料特性实现对易损目标物体的保护。综合上述性能,本发明既能够抓取大型异形物体,又能抓取重量较大的目标物体,同时还可以完成对易碎物品的抓取作业,可满足多样化任务的需求。
附图说明
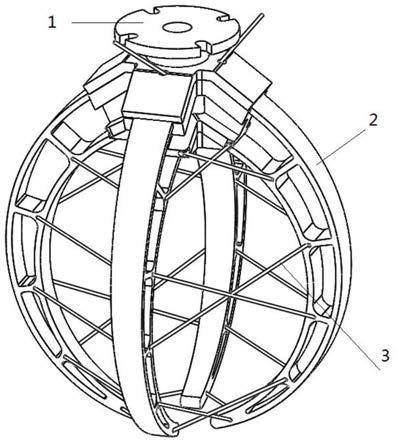
17.图1为本发明软体机械手立体结构示意图;
18.图2为本发明软体机械手抓取状态下立体结构示意图;
19.图3为本发明软体手指单元结构示意图;
20.图4为本发明软体手指单元局部剖面结构示意图;
21.图5为本发明软体手指单元与刚性保持架连接关系剖面结构示意图;
22.图6为本发明软体机械手交叉布线立体结构示意图;
23.图7为本发明刚性保持架顶盖结构示意图;
24.图8为本发明刚性保持架中间连接件结构示意图;
25.图9为本发明刚性保持架底座结构示意图;
26.图10为本发明软体机械手另一实施例立体结构示意图。
27.图中:1、刚性保持架,11、顶盖,111、法兰盘,112压板,12、中间连接件,121、中间连接件凹槽,1211中间连接件凸台,122、走线通道,123、穿线孔,13、底座,131底座凹槽,1311底座凸台;14、长螺栓;2、软体手指单元,21、软体手指,211、开口端,212、闭合端,213、夹臂,2131、通孔,214、加强筋,215、穿线孔,22、弹簧钢板;3、驱动绳索。
具体实施方式
28.下面结合附图和实施例对本发明的结构及特征进行详细说明。需要说明的是,可以对此处公开的实施例做出各种修改,因此,说明书中公开的实施例不应该视为对本发明的限制,而仅是作为实施例的范例,其目的是使本发明的特征显而易见。
29.如图1、图2所示,本发明公开的网状结构的大承载多指型软体机械手,包括刚性保持架1、至少三只软体手指单元2和驱动绳索3。软件手指单元2伞状地固定在刚性保持架1上,驱动绳索3将软体手指单元2彼此穿连在一起,并在驱动绳索3的作用下,软体手指单元2展开或闭合,实现物体的抓取。
30.如图3
‑
图5所示,构成本发明的软体手指单元2包括软体手指21和弹簧钢板22。软体手指21呈镊子形状,其开口端211为末端,与刚性保持架1相连,其闭合端212为执行端。为增强软体手指21的承载能力及整体刚度,贯穿软体手指21的闭合端和开口端内嵌有至少一条厚度为0.3
‑
1mm的薄片型弹簧钢板22。由于本发明在软体手指中内嵌有薄片型弹簧钢板,使得软体手指具有较强的刚度和承载能力,使其在自然状态下不仅能够保持伸直姿态,在其弯曲、抓取物体时,不丧失其弯曲能力呈圆弧型,参见图2所示。另外,为进一步增强软体手指的承载能力,软体手指21两条夹臂213之间增设有若干条加强筋214。
31.为将若干个软体手指单元彼此穿连起来,如图所示,软体手指21的夹臂213上间隔地开有若干个穿线孔215,驱动绳索3自该穿线孔215中穿过,将多个软体手指单元2彼此连接,编织成网状结构,如图1、图2和图6所示。
32.驱动绳索3以一定的穿线形式穿过软体手指单2,将软体手指单元2编织成网状结构。驱动绳索3的穿线方式可以是缠绕式如图1所示,还可以是交叉式如图6所示。缠绕式穿线方式为:将驱动绳索3从任一软体手指单元2尖端穿线孔穿入,并沿顺时针或者逆时针穿过同层所有穿线孔,再继续沿该方向穿过下一层所有穿线孔,直至驱动绳索穿过刚性保持架。交叉式穿线方式为:将驱动绳索3沿两个方向穿过相邻的两个软体手指单元2的闭合端穿线孔,再沿两个方向穿过下一层的两个穿线孔,之后继续沿两个方向穿过同一层的两个穿线孔,直至驱动绳索3两端均穿出刚性保持架1。
33.驱动绳索3可以是尼龙绳索,也可以是钢丝绳索。在本发明较佳实施例中,优选钢丝绳索,其优势在于:绳索负载能力大,通过拉紧驱动绳索可实现软体手指大负载抓取作业。
34.为减小驱动绳索3与穿线孔215之间的摩擦,减小驱动绳索对穿线孔的磨损,及延长驱动绳索的寿命,如图4所示,本发明在穿线孔215内设有导线套。导线套为空心圆柱体,通过胶接的方法粘在穿线孔内,以防多次拉线对软体手指表面造成磨损,同时可以降低拉线过程中的摩擦阻力,延长驱动绳索的使用寿命。
35.图7
‑
图9为构成本发明的刚性保持架1结构示意图,如图所示,刚性保持架1包括叠加设置的顶盖11、中间连接件12和底座13。顶盖11包括用于与工业机械臂等机构连接的法兰盘111和用于压固软体手指开口端的压板112。
36.如图5所示,软体手指21的第一个夹臂插在顶盖11和中间连接件12之间,第二个夹臂插在中间连接件12和底座13之间,顶盖11、中间连接件12和底座13通过长螺栓14紧固在一起。
37.为进一步夹固住软体手指21,如图3所示,软体手指每个夹臂213的末端均开有用
于固定的通孔2131。如图8所示,中间连接件12上开有用于放置夹臂末端的中间连接件凹槽121,在中间连接件凹槽121内设有用于卡固软体手指夹臂末端通孔2131的中间连接件凸台1211;同理,在底座13上也开有用于放置夹臂末端的底座凹槽131,在底座凹槽131内设有用于卡固软体手指夹臂末端通孔2131的底座凸台1311。
38.如图5、图7
‑
图9所示,在紧固软体手指21时,先将软体手指21的第一个夹臂213的末端放置在底座13的一个底座凹槽131内,并将夹臂末端的通孔2131卡套在底座凹槽131内的底座凸台1311上;然后,将中间连接件12压在底座13上方,将软体手指第二个夹臂的末端放置在中间连接件12上的一个中间连接件凹槽121内,并将夹臂末端的通孔2131卡套在中间连接件凹槽121内的中间连接件凸台1211上;再将顶盖11压在中间连接件12上;最后,通过长螺栓14将顶盖11、中间连接件12和底座13紧固在一起。
39.构成本发明的所有软体手指通过上述方法与刚性保持架连接固定好后,再通过驱动绳索3将所有软体手指彼此穿接起来。为使驱动绳索走线方便,如图8所示,本发明在中间连接件12内设有走线通道122,在中间连接件12的顶部设有穿线孔123,驱动绳索3可自由穿入穿出刚性保持架1。
40.网状多指型软体机械手在进行抓取操作时,先将机械手移动至目标物体上方,尽量保证目标物体中心线与机械手刚性保持架轴线相重合,机械手呈转开状向下移动,将目标物体罩在其抓取范围内,随后拉动驱动绳索使各软体手指单元向内弯曲如图2所示抓起目标物体,移动机械手至目标位置后,放松驱动绳索,将物体放下,至此一个工作流程完成。
41.根据被抓取目标物体的大小,设置软体手指单元的大小,并配置驱动绳索的强度。通常,软体手指单元的长度为220mm,内置的弹簧钢板的厚度为0.5mm,驱动绳索的直径为2mm,负载能力50kg。
42.在本发明较佳实施例中,软体机械手配置有四个软体手指单元,当然,也可以如图10所示,配置三个软体手指单元。
43.最后应说明的是:以上所述的各实施例仅用于说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或全部技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1