一种基于神经网络的绳驱机械臂的轨迹跟踪方法及系统
1.本发明涉及机械臂运动领域,尤其涉及一种基于神经网络的绳驱机械臂的轨迹跟踪方法及系统。
背景技术:
2.随着机器人技术在空间站、核电站等复杂场景和医疗辅助、灾害救援、水下探测等领域的应用不断深入,对机器人提出了更高的性能要求。传统的工业机器人受限于低自由度,很难实现拥挤受限空间中的避障。超冗余绳驱机械臂得益于高自由度以及特有的机械结构(例如,纤细的臂杆和机电分离),非常适宜在拥挤受限空间中作业。自由度的增加使超冗余绳驱机械臂具有优良的性能,但与此同时,所述机械臂的逆运动学问题求解难度也同样上升。
技术实现要素:
3.为了解决上述技术问题,本发明的目的是提供一种基于神经网络的绳驱机械臂的轨迹跟踪方法及系统,简化了传统的两层运算模型,在保证末端跟踪精度相当的前提下,提高了建模的便捷性和计算效率。
4.本发明所采用的第一技术方案是:一种基于神经网络的绳驱机械臂的轨迹跟踪方法,包括以下步骤:
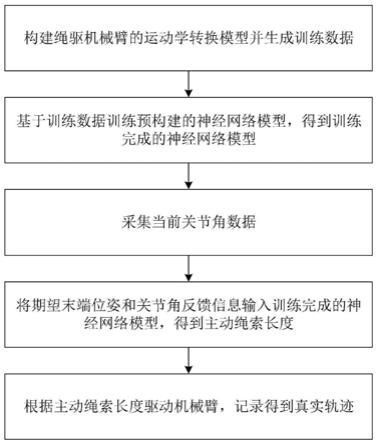
5.构建绳驱机械臂的运动学转换模型并生成训练数据;
6.基于训练数据训练预构建的神经网络模型,得到训练完成的神经网络模型;
7.采集当前关节角数据;
8.将期望末端位姿和当前关节角数据输入训练完成的神经网络模型,得到主动绳索长度;
9.根据主动绳索长度驱动机械臂,记录得到真实轨迹。
10.进一步,还包括:
11.计算真实轨迹与期望轨迹之间的姿态误差和位置误差。
12.进一步,所述构建绳驱机械臂的运动学转换模型并生成训练数据这一步骤,其具体包括:
13.构建绳驱机械臂的两层运动学转换模型;
14.所述两层运动学转换模型包括绳索驱动空间和关节空间之间的运动学转换模型,关节空间和操作空间之间的运动学转换模型;
15.基于绳驱机械臂的两层运动学转换模型和预设的末端位姿,解算关节角和主动绳索长度,得到训练数据。
16.进一步,所述绳索驱动空间与关节空间之间的运动学转换模型的公式表示如下:
[0017][0018][0019][0020]
上式中,n表示模块化关节的序号,l表示绳驱机械臂的主动绳索长度,θ表示绳驱机械臂的关节角,f()表示关节角到主动绳索长度的映射关系,j
l
表示关节角到主动绳索长度的雅可比矩阵,表示雅可比矩阵的伪逆。
[0021]
进一步,所述关节空间和操作空间之间的运动学转换模型的公式表示如下:
[0022]
t
e
=fkine(θ1,θ2,
···
,θ
2n
‑1,θ
2n
)
[0023]
[θ1,θ2,
···
,θ
2n
‑1,θ
2n
]=ikine(t
e
)
[0024]
上式中,t
e
表示基座到末端的姿态变换矩阵,fkine()表示正运动学方程,ikine()表示逆运动学方程,θ表示绳驱机械臂的关节角,n表示模块化关节的数量。
[0025]
进一步,所述预构建的神经网络模型包括输入层、隐藏层和输出层,所述基于训练数据训练预构建的神经网络模型,得到训练完成的神经网络模型这一步骤,其具体包括:
[0026]
根据机械臂的关节数量确定神经网络模型的隐藏层数量和隐藏层节点数量,得到预构建的神经网络模型;
[0027]
以期望末端位姿和关节角反馈变量作为输入层的输入,主动绳索长度为输出层的输出训练预构建的神经网络模型,以均方误差为误差函数进行训练,得到训练完成的神经网络模型。
[0028]
进一步,所述隐藏层第k个节点的输入输出函数关系描述为:
[0029][0030][0031]
上式中,m表示前一网络层包含的节点数,x
i
表示前一网络层第i个节点的输出,w
i,k
表示前一网络层第i个节点与当前节点连接的权重,b
k
表示与当前节点相对应的偏置。
[0032]
进一步,所述计算真实轨迹与期望轨迹之间的姿态误差和位置误差这一步骤,其具体包括:
[0033]
根据真实轨迹中的末端旋转矩阵和期望轨迹中的末端旋转矩阵计算姿态扰动,得到姿态误差;
[0034]
采用绝对误差衡量真实轨迹和期望轨迹之间的位置误差。
[0035]
本发明所采用的第二技术方案是:一种基于神经网络的绳驱机械臂的轨迹跟踪系
统,包括:
[0036]
模型构建模块,用于构建绳驱机械臂的运动学转换模型并生成训练数据;
[0037]
训练模块,基于训练数据训练预构建的神经网络模型,得到训练完成的神经网络模型;
[0038]
采集模块,用于采集当前关节角数据;
[0039]
结果输出模块,用于将期望末端位姿和关节角反馈信息输入训练完成的神经网络模型,得到主动绳索长度;
[0040]
轨迹跟踪模块,用于根据主动绳索长度驱动机械臂,记录得到真实轨迹。
[0041]
本发明方法及系统的有益效果是:本发明通过神经网络对所述机械臂进行逆运动学建模,在末端跟踪精度相当的情况下,提高了建模的便捷性和计算效率,通过引入关节角测量设备测量关节角反馈信息,提高了神经网络在逆运动学建模上的精度。
附图说明
[0042]
图1是本发明一种基于神经网络的绳驱机械臂的轨迹跟踪方法的步骤流程图;
[0043]
图2是本发明一种基于神经网络的绳驱机械臂的轨迹跟踪系统的结构框图;
[0044]
图3是本发明具体实施例超冗余绳驱机械臂示意图;
[0045]
图4是本发明具体实施例两层运动学转换建模示意图;
[0046]
图5是本发明具体实施例神经网络架构示意图;
[0047]
图6是本发明具体实施例轨迹跟踪姿态误差曲线图;
[0048]
图7是本发明具体实施例轨迹跟踪位置误差曲线图。
[0049]
附图标记:1、基座;2、机械臂;3、主动绳索;4、关节角反馈信息测量设备。
具体实施方式
[0050]
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
[0051]
如图3所示,为本实施例的超冗余绳驱机械臂示意图,从图中可见,本实施例的超冗余绳驱机械臂包括机械臂本体和关节角反馈信息测量设备4,机械臂本体包括基座1、机械臂2、主动绳索3。本实施例中,机械臂具有n个模块化关节,每个模块化关节具有两个正交的自由度,每个模块化关节由三根主动绳索驱动,其它自由度配置设计或主动绳索配置设计的超冗余绳驱机械臂均在本实施例的保护范围之内。关节角反馈信息测量设备可选的为关节编码器,凡是能够实现该功能的关节角反馈信息测量设备均在本实施例的保护范围之内。
[0052]
参照图1,本发明提供了一种基于神经网络的绳驱机械臂的轨迹跟踪方法,该方法包括以下步骤:
[0053]
s1、构建绳驱机械臂的运动学转换模型并生成训练数据;
[0054]
s2、基于训练数据训练预构建的神经网络模型,得到训练完成的神经网络模型;
[0055]
s3、采集当前关节角数据;
[0056]
具体地,基于关节角反馈信息测量设备采集当前关节数据;
[0057]
s4、将期望末端位姿和当前关节角数据输入训练完成的神经网络模型,得到主动绳索长度;
[0058]
s5、根据主动绳索长度驱动机械臂,记录得到真实轨迹。
[0059]
进一步作为本方法的优选实施例,还包括:
[0060]
s6、计算真实轨迹与期望轨迹之间的姿态误差和位置误差。
[0061]
进一步作为本方法的优选实施例,所述构建绳驱机械臂的运动学转换模型并生成训练数据这一步骤,其具体包括:
[0062]
s11、构建绳驱机械臂的两层运动学转换模型;
[0063]
具体地,如图4所示,为本实施例中两层运动学转换建模示意图,首先通过d
‑
h方法建立关节空间和操作空间之间的正运动学模型,获取基座到末端的姿态变换矩阵t
e
,进一步通过雅可比迭代的方法由t
e
解算关节角。
[0064]
可选的,通过几何法建立关节角到主动绳索的映射,通过雅可比迭代的方法由主动绳索解算关节角。
[0065]
所述两层运动学转换模型包括绳索驱动空间和关节空间之间的运动学转换模型,关节空间和操作空间之间的运动学转换模型;
[0066]
s12、基于绳驱机械臂的两层运动学转换模型和预设的末端位姿,解算关节角和主动绳索长度,得到训练数据。
[0067]
具体地,训练数据包括主动绳索长度、关节角、末端位置和姿态。
[0068]
进一步作为本方法优选实施例,所述绳索驱动空间与关节空间之间的运动学转换模型的公式表示如下:
[0069][0070][0071][0072]
上式中,n表示模块化关节的序号,l表示绳驱机械臂的主动绳索长度,θ表示绳驱机械臂的关节角,f()表示关节角到主动绳索长度的映射关系,j
l
表示关节角到主动绳索长度的雅可比矩阵,表示雅可比矩阵的伪逆。
[0073]
进一步作为本方法的优选实施例,所述关节空间和操作空间之间的运动学转换模型的公式表示如下:
[0074]
t
e
=fkine(θ1,θ2,
···
,θ
2n
‑1,θ
2n
)
[0075]
[θ1,θ2,
···
,θ
2n
‑1,θ
2n
]=ikine(t
e
)
[0076]
上式中,t
e
表示基座到末端的姿态变换矩阵,fkine()表示正运动学方程,ikine()表示逆运动学方程,θ表示绳驱机械臂的关节角,n表示模块化关节的数量。
[0077]
进一步作为本方法优选实施例,所述预构建的神经网络模型包括输入层、隐藏层和输出层,所述基于训练数据训练预构建的神经网络模型,得到训练完成的神经网络模型这一步骤,其具体包括:
[0078]
根据机械臂的关节数量确定神经网络模型的隐藏层数量和隐藏层节点数量,得到预构建的神经网络模型;
[0079]
以期望末端位姿和关节角反馈变量作为输入层的输入,主动绳索长度为输出层的输出训练预构建的神经网络模型,以均方误差为误差函数进行训练,得到训练完成的神经网络模型。
[0080]
具体地,本实施例中神经网络架构示意图参照图5,神经网络的输入层具有两部分输入,包括:由12个变量表示的期望末端位姿p(基座到末端的姿态变换矩阵t
e
的前三行),和2n个关节角反馈变量,输出层的输出为3n个主动绳索的长度。
[0081]
进一步作为本方法优选实施例,所述隐藏层第k个节点的输入输出函数关系描述为:
[0082][0083][0084]
上式中,m表示前一网络层包含的节点数,x
i
表示前一网络层第i个节点的输出,w
i,k
表示前一网络层第i个节点与当前节点连接的权重,b
k
表示与当前节点相对应的偏置。
[0085]
进一步作为本方法优选实施例,所述误差函数公式表示如下:
[0086][0087]
其中,m表示训练样本数,l表示bp神经网络模型输出的主动绳索长度,表示真实的主动绳索长度。
[0088]
可选的,隐藏层的激活函数采用高斯函数,隐藏层第k个节点的输入y
k
与输出之间函数关系描述为:
[0089][0090]
进一步作为本方法优选实施例,所述计算真实轨迹与期望轨迹之间的姿态误差和位置误差这一步骤,其具体包括:
[0091]
根据真实轨迹中的末端旋转矩阵和期望轨迹中的末端旋转矩阵计算姿态扰动,得到姿态误差;
[0092]
具体地,采用姿态扰动来衡量真实轨迹和期望轨迹之间的姿态误差,公式表示如下:
[0093][0094]
其中,r
actual
表示实际的末端旋转矩阵,r
ed
表示期望的末端旋转矩阵。
[0095]
进一步作为本方法优选实施例,将姿态扰动转换为三轴旋转角度误差:
[0096][0097]
其中,δo表示三轴旋转角度误差向量。
[0098]
采用绝对误差衡量真实轨迹和期望轨迹之间的位置误差。
[0099]
另外,所述神经网络模型可以选用rbf神经网络或bp神经网络,如图6所示,为本实施例中轨迹跟踪姿态误差曲线图,图中可以看出,rbf神经网络在姿态控制的精度和稳定性上均优于bp神经网络。如图7所示,为本实施例中轨迹跟踪位置误差曲线图,图中可以看出,rbf神经网络在位置控制的精度和稳定性上均优于bp神经网络。
[0100]
如图2所示,一种基于神经网络的绳驱机械臂的轨迹跟踪系统,包括:
[0101]
模型构建模块,用于构建绳驱机械臂的运动学转换模型并生成训练数据;
[0102]
训练模块,基于训练数据训练预构建的神经网络模型,得到训练完成的神经网络模型;
[0103]
采集模块,用于采集当前关节角数据;
[0104]
结果输出模块,用于将期望末端位姿和关节角反馈信息输入训练完成的神经网络模型,得到主动绳索长度;
[0105]
轨迹跟踪模块,用于根据主动绳索长度驱动机械臂,记录得到真实轨迹。
[0106]
上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0107]
进一步作为本系统优选实施例,还包括:
[0108]
误差模块,用于计算真实轨迹与期望轨迹之间的姿态误差和位置误差。
[0109]
本发明建立超冗余绳驱机械臂的两层运动学转换模型生成有效的训练数据样本,并通过样本对考虑关节角反馈信息的神经网络模型进行训练;通过所述机械臂的模块化关节处的关节编码器采集关节角反馈信息,并将期望的末端位姿和关节角反馈信息输入已训练的神经网络模型,获取主动绳索的长度,进而驱动机械臂。通过神经网络对所述机械臂进行逆运动学建模,在末端跟踪精度相当的情况下,提高了建模的便捷性和计算效率。
[0110]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1