一种建筑装饰装修智能机器人的制作方法
1.本技术涉及建筑装饰装修设备的领域,尤其是涉及一种建筑装饰装修智能机器人。
背景技术:
2.目前在建筑装饰装修工程中,窗框的安装需要操作工人手动完成。
3.窗框的安装一般需要工人将放置在地上的窗框预先放置到对应窗孔上,再通过螺栓将窗框整体固定在墙上,而窗框重量较重,工作人员将里窗孔处较远的窗框抬至窗孔处的过程较为费劲,存在一定改进空间。
技术实现要素:
4.为了方便地将窗框从地上移动到窗孔处,本技术提供一种建筑装饰装修智能机器人。
5.本技术提供的一种建筑装饰装修智能机器人采用如下的技术方案:一种建筑装饰装修智能机器人,包括机座,所述机座上设置有驱动机座移动的驱动机构、转动机构、升降机构、伸出机构以及抓取机构,所述升降机构设置在转动机构上,所述伸出机构设置在转动机构上,所述抓取机构设置在伸出机构上;所述抓取机构包括至少两个水平设置的水平夹爪,两个所述水平夹爪能够沿水平朝相互远离的方向移动并分别与窗框的相对的两侧内壁抵接。
6.通过采用上述技术方案,通过两个水平夹爪与窗框的两个相对的内侧壁抵接实现抓取机构对窗框的夹持,后续在通过驱动机构驱动机座移动至指定位置,利用转动机构升降机构来对窗框位置进行进一步调整,最终通过伸出机构将窗框推送到窗孔处进行预装,整个过程无需人动手参与搬运,起到了方便工作人员的作用。
7.可选的,所述抓取机构还包括至少两个竖向设置的竖向夹爪,两个所述竖向夹爪能够沿竖直朝相互远离的方向移动并分别与窗框的上、下两侧内壁抵接。
8.通过采用上述技术方案,通过两个竖向夹爪与窗框的上、下两侧内壁抵接,抓取机构通过两个水平夹爪对窗框进一步夹持固定,使得窗框移动过程中更加稳定。
9.可选的,所述伸出机构上设置有清扫机构,所述清扫机构包括电动清扫推杆和清扫件;所述清扫件的清洁面能够与窗孔位于底部的内侧壁抵接,所述电动清扫推杆带动清扫件沿窗孔底部的内侧壁的延伸方向往复运动。
10.通过采用上述技术方案,窗孔位于底部的内侧壁由于落灰、掉屑的原因会使得窗框放置到窗孔处时产生卡住的情况,清扫机构通过电动清扫推杆带动清扫件往复清扫窗孔位于底部的内侧壁,将灰尘和碎屑扫除,起到便于安装的作用。
11.可选的,所述清扫机构还包括清扫支架、电动推进推杆以及连接件;所述清扫支架顶部转动连接有滑动座,所述滑动座与电动推进推杆均沿电动清扫推杆的输出端的运动方向滑动定位 于伸出机构上;所述连接件的两端分别与电动推进推杆输出端和清扫支架转
动连接,所述电动清扫推杆的输出端与电动推进推杆连接;所述清扫支架的底部位于窗框下方,所述清扫件设置于清扫支架底部并位于窗框靠近窗孔的一侧;所述电动推进推杆能够通过连接件带动清扫件转动至窗框下方。
12.通过采用上述技术方案,为了在安装窗框前便于打扫窗孔,将清扫件设置在窗框靠近窗孔的一侧,而窗框底部的外侧壁与窗孔底部的内壁解接触,清扫件为了能够清扫窗孔内壁必须位于窗框底部的上方,清洁完毕后电动推进推杆通过连接件带动清扫件转动至窗框下方,使得窗框能够正常安装,避免干涉。
13.可选的,所述清扫件位于窗框远离窗孔的一侧;所述转动机构包括转动底座,所述转动底座设置于机座上,所述机座和转动底座之间竖向设置有若干挤压弹簧。
14.通过采用上述技术方案,挤压弹簧的设置在窗框放置到窗孔处而存在微小偏差时,伸出机构将窗框推至窗孔处,而挤压弹簧产生形变,使得伸出机构的施力方向改变,不再完全垂直于墙面,使得窗框的边缘能够被顺势推进窗孔处。
15.可选的,所述机座底部固定连接有若干电动推杆,所述电动推杆的输出端上设置有固定杆,所述固定杆沿竖直方向穿过机座进入到转动底座和机座之间,所述固定杆的上端与转动底座底部插接配合。
16.通过采用上述技术方案,固定杆在挤压弹簧闲置时穿过机座并插入到转动底座上,挤压弹簧失效,用于在转运窗框过程中保持窗框平稳运行。
17.可选的,所述水平夹爪包括两个水平夹片,两个所述水平夹片分别与窗框朝向和远离窗孔的端壁接触。
18.通过采用上述技术方案,水平夹片的设置使得水平夹爪对窗框的夹持作用更好,起到良好的防脱作用。
19.可选的,所述机座上还设置有放置箱,所述放置箱的底部设置有若干夹持座,窗框竖直插设于所述夹持座上。
20.通过采用上述技术方案,将需要安装的窗框通过夹持座预先放置在放置箱内,抓取机构能够直接从放置箱内将窗框夹持。
21.综上所述,本技术包括以下至少一种有益技术效果:1.通过竖向夹爪和水平夹爪与窗框的内侧壁抵接实现抓取机构对窗框的夹持,后续在通过驱动机构驱动机座移动至指定位置,利用转动机构升降机构来对窗框位置进行进一步调整,最终通过伸出机构将窗框推送到窗孔处进行预装,整个过程无需人动手参与搬运,起到了方便工作人员的作用;2.窗孔位于底部的内侧壁由于落灰、掉屑的原因会使得窗框放置到窗孔处时产生卡住的情况,清扫机构通过电动清扫推杆带动清扫件往复清扫窗孔位于底部的内侧壁,将灰尘和碎屑扫除,起到便于安装的作用。
附图说明
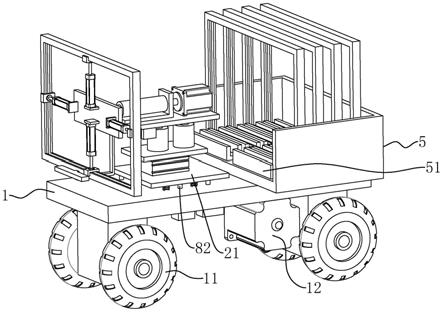
22.图1是本技术实施例的整体结构示意图;图2是本技术实施例的另一视角的整体结构示意图;图3是本技术实施例的伸出机构、抓取机构以及清扫机构的结构示意图;图4是本技术实施例的清扫机构的机构示意图。
23.附图标记说明:1、机座;11、驱动轮;12、驱动马达;21、转动底座;22、转动电机;23、升降底座;24、电动升降推杆;25、伸出底座;26、电动伸出推杆;3、窗框;41、抓取板;42、电动水平抓取推杆;43、水平夹爪;431、水平夹片;44、电动竖向抓取推杆;45、竖向夹爪;451、竖向夹片;5、放置箱;51、夹持座;61、电动清扫推杆;62、清扫件;63、清扫支架;64、电动推进推杆;65、连接件;66、滑动座;7、挤压弹簧;81、电动推杆;82、固定杆。
具体实施方式
24.以下结合附图1
‑
4对本技术作进一步详细说明。
25.本技术实施例公开一种建筑装饰装修智能机器人,参照图1,包括机座1,机座1上设置有用于移动的驱动机构,驱动机构包括设置在机座1底部的四个驱动轮11和用于控制驱动轮11转动的驱动马达12。机座1上还设置有转动机构、升降机构、伸出机构以及抓取机构。
26.参照图1、图2,转动机构包括转动底座21和转动电机22,转动底座21设置在机座1的上端面,转动电机22竖直固定安装在转动底座21上。升降机构包括升降底座23和两个电动升降推杆24,升降底座23固定连接在转动电机22的输出轴上,电动升降推杆24竖直固定安装在升降底座23上。伸出机构包括伸出底座25和电动伸出推杆26,伸出底座25共同固定安装在两个电动升降推杆24的输出端上,电动伸出推杆26水平固定安装在伸出底座25上。而抓取机构则设置在电动伸出推杆26的输出端上用于夹持待安装的窗框3,转动机构、升降机构与伸出机构分别带动抓取机构转动、升降以及沿水平方向移动,起到调节位置的作用。
27.参照图3,窗框3呈回字形,分别有上、下、左、右四个内侧壁以及上、下、左、右四个外侧壁,窗框3的外侧壁与窗孔的相应内壁对应。
28.参照图1
‑
图3,抓取机构包括抓取板41、两组水平抓取组件和竖向抓取组件,抓取板41竖直设置在电动伸出推杆26的输出端上,水平抓取组件和竖向抓取组件均设置在抓取板41上。水平抓取组件包括电动水平抓取推杆42和水平夹爪43,两个水平夹爪43背向水平设置,两个电动水平抓取推杆42分别推动两个水平夹爪43朝相互远离的方向移动并分别与窗框3的左右两侧内壁抵接;水平夹爪43还包括两个水平夹片431,两个水平夹片431分别与窗框3朝向和远离窗孔的端壁接触。竖向抓取组件包括电动竖向抓取推杆44和竖向夹爪45,两个竖向夹爪45背向竖向设置,两个电动竖向抓取推杆44分别推动两个竖向夹爪45朝相互远离的方向移动并分别与窗框3的上、下两侧内壁抵接;竖向夹爪45还包括两个竖向夹片451,两个竖向夹片451分别与窗框3朝向和远离窗孔的端壁接触。
29.参照图1、图2,机座1的上端于转动机构的一侧固定安装有放置箱5,放置箱5的顶部与朝向转动机构的一侧均开设开口,放置箱5的底部间隔固定连接有多个夹持座51,窗框3则沿竖直向下插设在夹持座51上,并等待水平夹爪43与竖向夹爪45将夹持座51上的窗框3夹起并运送至窗孔处进行预装。
30.参照图3、图4,为了能够对窗孔底部的内侧壁进行清洁,减少窗框3安装时因为窗孔底部的内侧壁上有异物而出现卡住的状态,伸出底座25上设置有清扫机构。清扫机构包括电动清扫推杆61、清扫件62、清扫支架63、电动推进推杆64以及连接件65,清扫件62的清洁面能够与窗孔位于底部的内侧壁抵接,用于直接对窗孔底部的内侧壁清洁,电动清扫推杆61带动窗孔底部的内侧壁的延伸方向往复运动,清扫支架63作为清扫件62的载体,电动
推进推杆64和连接件65配合带动清扫件62移动并解除与窗框3的干涉。
31.参照图3、图4,清扫支架63呈l形,清扫支架63的底部位于窗框3下方,并且清扫件62固定连接在清扫支架63的底部于窗框3靠近窗孔的一侧,此时清扫件62位于窗框3底部的上方。清扫支架63的顶部转动连接有滑动座66,滑动座66与电动推进推杆64均沿电动清扫推杆61的输出端的运动方向滑动定位于伸出底座25的底部;电动清扫推杆61固定连接在伸出底座25的底部,并且电动清扫推杆61的输出端与电动推进推杆64固定连接。连接件65的两端分别与电动推进推杆64的输出端和清扫支架63转动连接,使得电动清扫推杆61能够同时带动清扫支架63和电动推进推杆64在伸出底座25上滑动,并且连接件65的设置使得电动推进推杆64输出端的运动带动清扫支架63底部产生转动,使得清扫件62能够转动至窗框3下方,在窗孔清扫结束后能够不影响窗框3预装在窗孔上。
32.参照图1、图2,机座1和转动底座21之间竖向固定连接有若干挤压弹簧7,挤压弹簧7的设置在窗框3放置到窗孔处而存在微小偏差时,伸出机构将窗框3推至窗孔处,而挤压弹簧7产生形变,使得伸出机构的施力方向改变,不再完全垂直于墙面,使得窗框3的边缘能够被顺势推进窗孔处。机座1底部固定连接有若干电动推杆81,电动推杆81的输出端上固定连接有固定杆82,固定杆82沿竖直方向穿过机座1进入到转动底座21和机座1之间,固定杆82的上端能够在挤压弹簧7不使用时与转动底座21底部插接配合,起到稳定转动机构的作用。
33.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1