一种具有自攀爬功能的杆体清理机器人的制作方法
1.本发明涉及杆体清理机器人技术领域,具体为一种具有自攀爬功能的杆体清理机器人。
背景技术:
2.随着科技的进步与发展,高空杆体的使用越来越普遍,在体育场,广场等场地使用较多,杆体长期暴露在空气中受到雨水的腐蚀表面的漆层容易出现破损脱落的情况,需要对破损处进行清理喷漆,需要用到杆体清理机器人。
3.市场上的杆体清理机器人不具备攀爬功能,需要借助外力辅助进行清理工作,实际使用效果较差的缺点。
技术实现要素:
4.本发明的目的在于提供一种具有自攀爬功能的杆体清理机器人,以解决上述背景技术中提出的杆体清理机器人不具备攀爬功能,需要借助外力辅助进行清理工作,实际使用效果较差的问题。
5.为实现上述目的,本发明提供如下技术方案:一种具有自攀爬功能的杆体清理机器人,包括控制主体和夹紧组件,所述控制主体的后端中部设置有拼接板,且拼接板通过拼接螺栓与控制主体相连接,用于机器人攀爬的所述攀爬组件连接于拼接板的另一侧,且攀爬组件包括下递进环、下安装轴、下衔接块、下紧固螺栓、下活动连接轴、活动连杆、上递进环、上活动连接轴、液压缸、上紧固螺栓、上衔接块、上安装轴、连接滑块和连接滑轨,所述下递进环的一端连接有下衔接块,且下递进环通过下安装轴与下递进环相连接,所述下递进环的另一端穿设有下紧固螺栓,且下递进环的内部两侧中部设置有下活动连接轴,所述下活动连接轴的上端连接有活动连杆,且活动连杆的上端连接有上递进环,所述活动连杆通过上活动连接轴与上递进环相连接,且活动连杆的中部连接有液压缸,所述上递进环的一端穿设有上紧固螺栓,且上递进环的另一端连接有上衔接块,所述上衔接块通过上安装轴与上递进环相连接,且上衔接块的一侧衔接有连接滑块,所述连接滑块的内侧连接有连接滑轨,所述控制主体的两侧连接有用于杆体清理的清理组件,用于机器人限位夹紧的所述夹紧组件设置于下递进环和上递进环的内侧。
6.优选的,所述攀爬组件与拼接板呈垂直状分布,且攀爬组件通过拼接板和拼接螺栓与控制主体之间构成螺纹连接。
7.优选的,所述下递进环通过下安装轴与下衔接块之间构成转动连接,且下紧固螺栓贯穿于下递进环的内侧。
8.优选的,所述上递进环与下递进环呈同心圆分布,且活动连杆关于上递进环和下递进环的中心位置对称设置有两个。
9.优选的,所述连接滑块与上衔接块固定连接,且连接滑块的内侧尺寸与连接滑轨的外侧尺寸相吻合,并且上递进环通过上衔接块和连接滑块与连接滑轨之间构成滑动连
接。
10.优选的,所述清理组件包括转动电机、清理机械臂、转接块、微型电机、打磨轮、喷头和摄像头,且转动电机的一端连接有清理机械臂,所述清理机械臂的另一端连接有转接块,且转接块的另一端安置有微型电机,所述微型电机的另一端连接有打磨轮,所述转接块的两侧设置有喷头,且转接块的上端安置有摄像头。
11.优选的,所述喷头关于转接块的中心位置对称设置有两个,且摄像头的中轴线与打磨轮的中轴线相重合。
12.优选的,所述夹紧组件包括夹紧压夜缸、连接块、夹块、固定螺栓和橡胶层,且夹紧压夜缸的一端衔接有连接块,所述连接块的另一侧连接有夹块,且夹块通过固定螺栓与固定螺栓与连接块相连接,所述夹块的另一侧设置有橡胶层。
13.优选的,所述夹块与夹紧压夜缸呈垂直状分布,且夹块通过固定螺栓与连接块之间构成螺纹连接,且夹块设置有两组,并且夹块每组设置有四个。
14.优选的,所述橡胶层的外侧贴合于夹块的内侧,且橡胶层与夹块之间呈嵌入连接。
15.本发明提供了一种具有自攀爬功能的杆体清理机器人,具备以下有益效果:该具有自攀爬功能的杆体清理机器人,通过多个组件之间的相互配合,可以实现对高空杆体的外表面破损处进行打磨、喷漆,便于对高空杆体进行维护工作,通过递进式的驱动使得机器人可以进行自主攀爬的同时确保攀爬过程中的稳定性,通过夹紧组件可以对攀爬过程中及清理过程中的机器人进行定位锁紧,充分保证机器人攀爬与高空杆体外侧的牢固性,避免出现掉落导致机器人出现损坏的情况;
16.1、本发明通过垂直状分布的攀爬组件与拼接板,可以保证之间位置的准确性,通过拼接板和拼接螺栓与控制主体相连接的攀爬组件,保证两者之间连接牢固性的同时便于进行拆卸,便于对机器人进行拆分运输,便于对机器人进行携带,同时便于对机器人的后期维护工作,可以对机器人损坏部分进行针对性的维护与更换,降低成本,提升该杆体清理机器人的实际使用效果。
17.2、本发明通过下安装轴与下衔接块转动连接的下递进环,便于张开包裹于杆体的外侧,通过紧固下紧固螺栓闭合下递进环于杆体的外侧,且上递进环的结构与下递进环的结构相一致,便于实际操作,配合设置在上递进环和下递进环内侧的夹紧组件,实现攀爬组件的抱紧工作,连接在上递进环和下递进环内部两侧的活动连杆,通过液压缸的驱动,实现上递进环和下递进环之间的递进运动结构,便于机器人进行杆体外侧的上下移动。
18.3、本发明通过同心圆分布的上递进环与下递进环,可以保证之间位置的准确性,当攀爬组件完成包裹于杆体外侧时,设置在上递进环与下递进环内侧的夹紧组件,通过夹紧压夜缸驱动夹块夹持于杆体的外表面,当机器人向上移动时上递进环内部的夹紧组件松开,同时液压缸驱动活动连杆张开,使得上递进环向上移动,连接在上递进环一端的连接滑块,配合下衔接块上端设置有的连接滑轨,可以保证上递进环向上移动过程中的稳定性,当活动连杆张开最大角度时即为上递进环单次递进最大高度,然后上递进环内部的夹紧组件夹紧于杆体外侧,然后下递进环内侧的夹紧组件松开,同时液压缸驱动活动连杆收缩,使得下递进环向上移动,即可实现机器人的递进式攀爬工作,有效机器人攀爬及作业过程中的稳定性。
19.4、本发明通过设置在转接块两侧的喷头,配合连接于微型电机一端的打磨轮,可
以对高空杆体外的破损处进行打磨并喷涂,清理机械臂可以进行伸缩延展,配合转动电机进行角度的调节工作,通过清理机械臂的驱动,有效保证打磨轮和喷头的有效作业范围,同时配合设置在转接块上端中部的摄像头,可以对打磨及喷漆过程进行监测,确保清理机器人工作的持续性与有效性。
20.5、本发明通过垂直状分布的夹块与夹紧压夜缸,可以保证之间位置的准确性,通过固定螺栓与连接块相连接的夹块,保证之间连接牢固性的同时便于对夹块进行拆卸更换,确保实际的夹持效果,配合设置在夹块一次的橡胶层,可以提升夹块与杆体外表面的摩擦力,从而进一步保证清理机器人在攀爬与清理过程中的稳定性,嵌入连接的橡胶层与夹块,有效避免橡胶层出现脱落的情况。
附图说明
21.图1为本发明一种具有自攀爬功能的杆体清理机器人的整体俯视结构示意图;
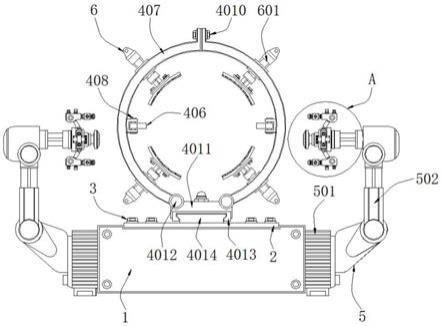
22.图2为本发明一种具有自攀爬功能的杆体清理机器人的整体正视结构示意图;
23.图3为本发明一种具有自攀爬功能的杆体清理机器人的下递进环及上递进环正视结构示意图;
24.图4为本发明一种具有自攀爬功能的杆体清理机器人的夹紧组件俯视结构示意图;
25.图5为本发明一种具有自攀爬功能的杆体清理机器人的图1中a处放大结构示意图。
26.图中:1、控制主体;2、拼接板;3、拼接螺栓;4、攀爬组件;401、下递进环;402、下安装轴;403、下衔接块;404、下紧固螺栓;405、下活动连接轴;406、活动连杆;407、上递进环;408、上活动连接轴;409、液压缸;4010、上紧固螺栓;4011、上衔接块;4012、上安装轴;4013、连接滑块;4014、连接滑轨;5、清理组件;501、转动电机;502、清理机械臂;503、转接块;504、微型电机;505、打磨轮;506、喷头;507、摄像头;6、夹紧组件;601、夹紧压夜缸;602、连接块;603、夹块;604、固定螺栓;605、橡胶层。
具体实施方式
27.请参阅图1-5,本发明提供一种技术方案:一种具有自攀爬功能的杆体清理机器人,包括控制主体1和夹紧组件6,控制主体1的后端中部设置有拼接板2,且拼接板2通过拼接螺栓3与控制主体1相连接,用于机器人攀爬的攀爬组件4连接于拼接板2的另一侧,且攀爬组件4包括下递进环401、下安装轴402、下衔接块403、下紧固螺栓404、下活动连接轴405、活动连杆406、上递进环407、上活动连接轴408、液压缸409、上紧固螺栓4010、上衔接块4011、上安装轴4012、连接滑块4013和连接滑轨4014,下递进环401的一端连接有下衔接块403,且下递进环401通过下安装轴402与下递进环401相连接,下递进环401的另一端穿设有下紧固螺栓404,且下递进环401的内部两侧中部设置有下活动连接轴405,下活动连接轴405的上端连接有活动连杆406,且活动连杆406的上端连接有上递进环407,活动连杆406通过上活动连接轴408与上递进环407相连接,且活动连杆406的中部连接有液压缸409,上递进环407的一端穿设有上紧固螺栓4010,且上递进环407的另一端连接有上衔接块4011,上衔接块4011通过上安装轴4012与上递进环407相连接,且上衔接块4011的一侧衔接有连接
滑块4013,连接滑块4013的内侧连接有连接滑轨4014,控制主体1的两侧连接有用于杆体清理的清理组件5,用于机器人限位夹紧的夹紧组件6设置于下递进环401和上递进环407的内侧;
28.具体操作如下,通过下安装轴402与下衔接块403转动连接的下递进环401,便于张开包裹于杆体的外侧,通过紧固下紧固螺栓404闭合下递进环401于杆体的外侧,且上递进环407的结构与下递进环401的结构相一致,便于实际操作,配合设置在上递进环407和下递进环401内侧的夹紧组件6,实现攀爬组件4的抱紧工作,连接在上递进环407和下递进环401内部两侧的活动连杆406,通过液压缸409的驱动,实现上递进环407和下递进环401之间的递进运动结构,便于机器人进行杆体外侧的上下移动;
29.请参阅图1-4,攀爬组件4与拼接板2呈垂直状分布,且攀爬组件4通过拼接板2和拼接螺栓3与控制主体1之间构成螺纹连接,下递进环401通过下安装轴402与下衔接块403之间构成转动连接,且下紧固螺栓404贯穿于下递进环401的内侧,上递进环407与下递进环401呈同心圆分布,且活动连杆406关于上递进环407和下递进环401的中心位置对称设置有两个,连接滑块4013与上衔接块4011固定连接,且连接滑块4013的内侧尺寸与连接滑轨4014的外侧尺寸相吻合,并且上递进环407通过上衔接块4011和连接滑块4013与连接滑轨4014之间构成滑动连接;
30.具体操作如下,垂直状分布的攀爬组件4与拼接板2,可以保证之间位置的准确性,通过拼接板2和拼接螺栓3与控制主体1相连接的攀爬组件4,保证两者之间连接牢固性的同时便于进行拆卸,便于对机器人进行拆分运输,便于对机器人进行携带,同时便于对机器人的后期维护工作,可以对机器人损坏部分进行针对性的维护与更换,降低成本,提升该杆体清理机器人的实际使用效果,同心圆分布的上递进环407与下递进环401,可以保证之间位置的准确性,当攀爬组件4完成包裹于杆体外侧时,设置在上递进环407与下递进环401内侧的夹紧组件6,通过夹紧压夜缸601驱动夹块603夹持于杆体的外表面,当机器人向上移动时上递进环407内部的夹紧组件6松开,同时液压缸409驱动活动连杆406张开,使得上递进环407向上移动,连接在上递进环407一端的连接滑块4013,配合下衔接块403上端设置有的连接滑轨4014,可以保证上递进环407向上移动过程中的稳定性,当活动连杆406张开最大角度时即为上递进环407单次递进最大高度,然后上递进环407内部的夹紧组件6夹紧于杆体外侧,然后下递进环401内侧的夹紧组件6松开,同时液压缸409驱动活动连杆406收缩,使得下递进环401向上移动,即可实现机器人的递进式攀爬工作,有效机器人攀爬及作业过程中的稳定性;
31.请参阅图1、图2和图5,清理组件5包括转动电机501、清理机械臂502、转接块503、微型电机504、打磨轮505、喷头506和摄像头507,且转动电机501的一端连接有清理机械臂502,清理机械臂502的另一端连接有转接块503,且转接块503的另一端安置有微型电机504,微型电机504的另一端连接有打磨轮505,转接块503的两侧设置有喷头506,且转接块503的上端安置有摄像头507,喷头506关于转接块503的中心位置对称设置有两个,且摄像头507的中轴线与打磨轮505的中轴线相重合;
32.具体操作如下,设置在转接块503两侧的喷头506,配合连接于微型电机504一端的打磨轮505,可以对高空杆体外的破损处进行打磨并喷涂,清理机械臂502可以进行伸缩延展,配合转动电机501进行角度的调节工作,通过清理机械臂502的驱动,有效保证打磨轮
505和喷头506的有效作业范围,同时配合设置在转接块503上端中部的摄像头507,可以对打磨及喷漆过程进行监测,确保清理机器人工作的持续性与有效性;
33.请参阅图1和图4,夹紧组件6包括夹紧压夜缸601、连接块602、夹块603、固定螺栓604和橡胶层605,且夹紧压夜缸601的一端衔接有连接块602,连接块602的另一侧连接有夹块603,且夹块603通过固定螺栓604与固定螺栓604与连接块602相连接,夹块603的另一侧设置有橡胶层605,夹块603与夹紧压夜缸601呈垂直状分布,且夹块603通过固定螺栓604与连接块602之间构成螺纹连接,且夹块603设置有两组,并且夹块603每组设置有四个,橡胶层605的外侧贴合于夹块603的内侧,且橡胶层605与夹块603之间呈嵌入连接;
34.具体操作如下,垂直状分布的夹块603与夹紧压夜缸601,可以保证之间位置的准确性,通过固定螺栓604与连接块602相连接的夹块603,保证之间连接牢固性的同时便于对夹块603进行拆卸更换,确保实际的夹持效果,配合设置在夹块603一次的橡胶层605,可以提升夹块603与杆体外表面的摩擦力,从而进一步保证清理机器人在攀爬与清理过程中的稳定性,嵌入连接的橡胶层605与夹块603,有效避免橡胶层605出现脱落的情况。
35.综上,该具有自攀爬功能的杆体清理机器人,使用时,首先将攀爬组件4通过拼接板2和拼接螺栓3与控制主体1相连接,然后将攀爬组件4抱紧于需要进行清理的杆体外侧,通过下安装轴402与下衔接块403转动连接的下递进环401,便于张开包裹于杆体的外侧,通过紧固下紧固螺栓404闭合下递进环401于杆体的外侧,且上递进环407的结构与下递进环401的结构相一致,便于实际操作,配合设置在上递进环407和下递进环401内侧的夹紧组件6,实现攀爬组件4的抱紧工作,当攀爬组件4完成包裹于杆体外侧时,设置在上递进环407与下递进环401内侧的夹紧组件6,通过夹紧压夜缸601驱动夹块603夹持于杆体的外表面,当机器人向上移动时上递进环407内部的夹紧组件6松开,同时液压缸409驱动活动连杆406张开,使得上递进环407向上移动,连接在上递进环407一端的连接滑块4013,配合下衔接块403上端设置有的连接滑轨4014,可以保证上递进环407向上移动过程中的稳定性,当活动连杆406张开最大角度时即为上递进环407单次递进最大高度,然后上递进环407内部的夹紧组件6夹紧于杆体外侧,然后下递进环401内侧的夹紧组件6松开,同时液压缸409驱动活动连杆406收缩,使得下递进环401向上移动,即可实现机器人的递进式攀爬工作,当攀爬至破损处时,设置在转接块503两侧的喷头506,配合连接于微型电机504一端的打磨轮505,可以对高空杆体外的破损处进行打磨并喷涂,清理机械臂502可以进行伸缩延展,配合转动电机501进行角度的调节工作,通过清理机械臂502的驱动,有效保证打磨轮505和喷头506的有效作业范围,同时配合设置在转接块503上端中部的摄像头507,可以对打磨及喷漆过程进行监测,确保清理机器人工作的持续性与有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1