一种用于施工现场辅助管理的旁站机器人的制作方法
1.本发明属于施工管理相关技术领域,具体涉及一种用于施工现场辅助管理的旁站机器人。
背景技术:
2.旁站机器人可代替管理人员对施工作业进行有效的连续监控,监督施工单位严格按施工规范设计要求施工,观察施工工艺,检查工程实体,确保工程符合规范的设计要求。
3.申请号为cn201910675395.8提出了一种工程建设智能旁站机器人系统,其包括依次网络连接的网络摄像头、远端录像机和监示器,所述网络摄像头包括摄像头,采集图像数据或者视频数据;视频处理模块,处理所述摄像头采集的图像数据或者视频数据;通讯模块,所述通讯模块连接视频处理模块的输出端;智能ai芯片,所述智能ai芯片连接视频处理模块的输出端;预警模块,所述预警模块电信号连接智能ai芯片;语音模块,所述语音模块连接通讯模块;定位芯片,所述定位芯片连接通讯模块;供能模块,用于网络摄像头提供电能;数据存储模块,用于存储本地数据。本发明实现了可远程实时通信、实时监控抓拍、实时沟通、定位、遥控、智能识别查验关键部位和关键工序施工情况。
4.上述文件提出的技术方案还存在以下问题:只是实现对施工现场施工作业的监控功能,而不具有自动识别是否存在违规操作的能力,另外由于施工现场环境复杂,摄像头在受到撞击、或人为损伤而丧失监控能力时无法进行施工监控,失去对现场的施工旁站监视作用。
技术实现要素:
5.本发明的目的在于提供一种用于施工现场辅助管理的旁站机器人,以解决上述背景技术中提出的违规操作不能自动识别与摄像头异常时失去旁站作用的问题。
6.为实现上述目的,本发明提供如下技术方案:一种用于施工现场辅助管理的旁站机器人,包括机器人主体以及与机器人主体通过网络连接的云服务器,所述机器人主体包括:
7.摄像采集模块,用于实时采集施工现场画面信息;
8.语音收录模块,用于收录施工现场运作时语音信息;
9.数据处理模块,用于处理及分析摄像采集模块与语音收录模块采集到的画面与语音数据;
10.定位模块,用于对机器人主体所在位置进行实时定位;
11.行为识别模块,用于分析识别摄像采集模块采集的施工现场画面数据;
12.ai智能芯片,用于结合行为识别模块分析施工现场画面信息是否存在违规操作;
13.预警模块,用于在ai智能芯片分析后出现违规操作时进行智能警报;
14.通信模块,用于将摄像采集模块、语音收录模块与云服务器进行网络信息传输;
15.互动模块,用于使终端管理人员与现场施工人员进行远程交互;
16.所述摄像采集模块包括第一监控摄像头、第二监控摄像头与状态监测模块,所述状态监测模块实时监控第一监控摄像头的工作状态,在当所述第一监控摄像头出现异常时,及时开启第二监控摄像头对现场画面进行实时录像,并通过所述通信模块将画面信息直接上传至云服务器。
17.优选的,所述摄像采集模块还包括储存模块与供能模块,用于储存由第一监控摄像头采集到的画面信息,便于管理人员的调取。
18.优选的,所述第一监控摄像头通过电缆线与施工现场电网系统连接,所述供能模块采用蓄电池及太阳电池为第二监控摄像头提供电能。
19.优选的,所述互动模块包括视频传输模块与语音互动模块,所述视频传输模块与语音互动模块可与云服务器连接,实现管理人员与现场人员的视频对话。
20.优选的,所述状态监测模块包括红外传感器,所述红外传感器监测第一监控摄像头所在位置的红外光线辐射时的温度变化。
21.优选的,所述状态监测模块包括电压及电流传感器,所述电压及电流传感器监测第一监控摄像头的电压、电流变化,进而监控第一监控摄像头的工作状态。
22.优选的,所述状态监测模块包括位移传感器,所述位移传感器监测第一监控摄像头的移动变量,从而监控第一监控摄像头的位置变化。
23.与现有旁站机器人技术相比,本发明提供了一种用于施工现场辅助管理的旁站机器人,具备以下有益效果:
24.1、本发明第一监控摄像头监控的过程中,可通过行为识别模块结合ai智能芯片的智能算法分析施工现场画面信息是否存在违规操作,进而代替管理人员旁站对施工现场进行远程监控,在出现违规操作时,通过预警模块进行智能警报,提醒现场施工人员注意规范操作,同时通过通信模块向管理人员发出提示信息,促进现场施工人员进行规范操作;
25.2、本发明在第一监控摄像头监控的过程中,通过状态监测模块实时监控第一监控摄像头的工作状态,在当监测到第一监控摄像头出现异常时,能够及时开启第二监控摄像头代替第一监控摄像头对现场画面进行实时录像,并通过通信模块将画面信息直接上传至云服务器,方便管理人员及时查看与调取信息。
附图说明
26.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
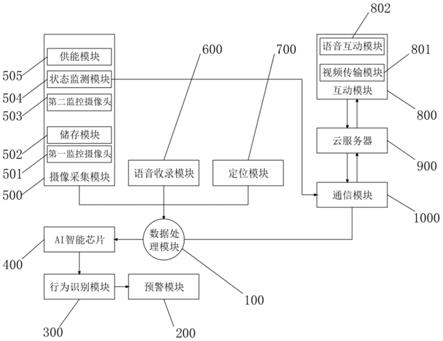
27.图1为本发明提出的一种用于施工现场辅助管理的旁站机器人结构框图;
28.图2为本发明提出的状态监测模块结构框图;
29.图3为本发明提出的施工现场旁站监测流程框图;
30.图4为本发明提出的第一监控摄像头监测流程框图;
31.图中:100、数据处理模块;200、预警模块;300、行为识别模块;400、ai智能芯片;500、摄像采集模块;501、第一监控摄像头;502、储存模块;503、第二监控摄像头;504、状态监测模块;5041、红外传感器;5042、电压及电流传感器;5043、位移传感器;505、供能模块;600、语音收录模块;700、定位模块;800、互动模块;801、视频传输模块;802、语音互动模块;900、云服务器;1000、通信模块。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.请参阅图1
‑
图4,本发明提供一种技术方案具有以下三种实施例:
34.实施例一
35.一种用于施工现场辅助管理的旁站机器人,包括机器人主体以及与机器人主体通过网络连接的云服务器900,机器人主体包括:
36.摄像采集模块500,用于实时采集施工现场画面信息,可采用夜景高清摄像头、360摄像头及旋转摄像头,通过摄像采集模块500可辅助和代替管理人员进行旁站监视,进而确保施工过程的安全进行。
37.语音收录模块600,用于收录施工现场运作时语音信息,通过语音收录模块600实施收录通话语音,便于现场施工人员与管理人员远程沟通。
38.数据处理模块100,用于处理及分析摄像采集模块500与语音收录模块600采集到的画面与语音数据,可以为cpu、gpu等处理单元组成,接受并执行运算命令。
39.定位模块700,用于对机器人主体所在位置进行实时定位,可采用gps定位系统与北斗导航系统联网定位,实时掌握机器人所处位置,便于快速找到机器人所在施工场地。
40.行为识别模块300,用于分析识别摄像采集模块500采集的施工现场画面数据,可监测分析现场施工人员的行为动态与施工建筑物的施工情况及建筑平台的搭建状况,从而监视施工过程中是否出现违规行为。
41.ai智能芯片400,用于结合行为识别模块300分析施工现场画面信息是否存在违规操作,代替管理人员旁站对施工现场进行远程监控,从而保证施工作业的规范进行。
42.预警模块200,用于在ai智能芯片400分析后出现违规操作时进行智能警报,报警方式可以为蜂鸣器警报或者警报灯、智能语音播报等,提醒现场施工人员的操作是否规范进行。
43.通信模块1000,用于将摄像采集模块500、语音收录模块600与云服务器900进行网络信息传输,通信模块1000的连接方式可为网线网络传输、无线区域覆盖或者局部网域热点覆盖,实现网络互通。
44.互动模块800,用于使终端管理人员与现场施工人员进行远程交互,互动模块800包括视频传输模块801与语音互动模块802,视频传输模块801与语音互动模块802可与云服务器900连接,实现管理人员与现场人员的视频对话,可远程调解施工程序,及时管理施工的有序进行。
45.摄像采集模块500包括第一监控摄像头501、第二监控摄像头503与状态监测模块504,状态监测模块504包括电压及电流传感器5042,电压及电流传感器5042监测第一监控摄像头501的电压、电流变化,进而监控第一监控摄像头501的工作状态,判断第一监控摄像头501损坏导致电路故障,并能够及时开启第二监控摄像头503对现场画面进行实时录像,并通过通信模块1000将画面信息直接上传至云服务器900,同时便于提醒管理人员进行维护,摄像采集模块500还包括储存模块502与供能模块505,用于储存由第一监控摄像头501
采集到的画面信息,便于管理人员的调取。
46.第一监控摄像头501通过电缆线与施工现场电网系统连接,供能模块505采用蓄电池及太阳电池为第二监控摄像头503提供电能。
47.实施例二
48.一种用于施工现场辅助管理的旁站机器人,包括机器人主体以及与机器人主体通过网络连接的云服务器900,机器人主体包括:
49.摄像采集模块500,用于实时采集施工现场画面信息,可采用夜景高清摄像头、360摄像头及旋转摄像头,通过摄像采集模块500可辅助和代替管理人员进行旁站监视,进而确保施工过程的安全进行。
50.语音收录模块600,用于收录施工现场运作时语音信息,通过语音收录模块600实施收录通话语音,便于现场施工人员与管理人员远程沟通。
51.数据处理模块100,用于处理及分析摄像采集模块500与语音收录模块600采集到的画面与语音数据,可以为cpu、gpu等处理单元组成,接受并执行运算命令。
52.定位模块700,用于对机器人主体所在位置进行实时定位,可采用gps定位系统与北斗导航系统联网定位,实时掌握机器人所处位置,便于快速找到机器人所在施工场地。
53.行为识别模块300,用于分析识别摄像采集模块500采集的施工现场画面数据,可监测分析现场施工人员的行为动态与施工建筑物的施工情况及建筑平台的搭建状况,从而监视施工过程中是否出现违规行为。
54.ai智能芯片400,用于结合行为识别模块300分析施工现场画面信息是否存在违规操作,代替管理人员旁站对施工现场进行远程监控,从而保证施工作业的规范进行。
55.预警模块200,用于在ai智能芯片400分析后出现违规操作时进行智能警报,报警方式可以为蜂鸣器警报或者警报灯、智能语音播报等,提醒现场施工人员的操作是否规范进行。
56.通信模块1000,用于将摄像采集模块500、语音收录模块600与云服务器900进行网络信息传输,通信模块1000的连接方式可为网线网络传输、无线区域覆盖或者局部网域热点覆盖,实现网络互通。
57.互动模块800,用于使终端管理人员与现场施工人员进行远程交互,互动模块800包括视频传输模块801与语音互动模块802,视频传输模块801与语音互动模块802可与云服务器900连接,实现管理人员与现场人员的视频对话,可远程调解施工程序,及时管理施工的有序进行。
58.摄像采集模块500包括第一监控摄像头501、第二监控摄像头503与状态监测模块504,状态监测模块504包括位移传感器5043,位移传感器5043可替换为角度传感器、压力传感器与振动传感器等,目的是通过这些传感器感知第一监控摄像头501是否遭到碰撞或出现人为晃动,可通过位移传感器5043监测第一监控摄像头501的移动变量,从而监控第一监控摄像头501的位置变化,在当第一监控摄像头501出现异常移动时,及时开启第二监控摄像头503对现场画面进行实时录像,并通过通信模块1000将画面信息直接上传至云服务器900。
59.摄像采集模块500还包括储存模块502与供能模块505,用于储存由第一监控摄像头501采集到的画面信息,便于管理人员的调取
60.第一监控摄像头501通过电缆线与施工现场电网系统连接,供能模块505采用蓄电池及太阳电池为第二监控摄像头503提供电能。
61.实施例三
62.一种用于施工现场辅助管理的旁站机器人,包括机器人主体以及与机器人主体通过网络连接的云服务器900,机器人主体包括:
63.摄像采集模块500,用于实时采集施工现场画面信息,可采用夜景高清摄像头、360摄像头及旋转摄像头,通过摄像采集模块500可辅助和代替管理人员进行旁站监视,进而确保施工过程的安全进行。
64.语音收录模块600,用于收录施工现场运作时语音信息,通过语音收录模块600实施收录通话语音,便于现场施工人员与管理人员远程沟通。
65.数据处理模块100,用于处理及分析摄像采集模块500与语音收录模块600采集到的画面与语音数据,可以为cpu、gpu等处理单元组成,接受并执行运算命令。
66.定位模块700,用于对机器人主体所在位置进行实时定位,可采用gps定位系统与北斗导航系统联网定位,实时掌握机器人所处位置,便于快速找到机器人所在施工场地。
67.行为识别模块300,用于分析识别摄像采集模块500采集的施工现场画面数据,可监测分析现场施工人员的行为动态与施工建筑物的施工情况及建筑平台的搭建状况,从而监视施工过程中是否出现违规行为。
68.ai智能芯片400,用于结合行为识别模块300分析施工现场画面信息是否存在违规操作,代替管理人员旁站对施工现场进行远程监控,从而保证施工作业的规范进行。
69.预警模块200,用于在ai智能芯片400分析后出现违规操作时进行智能警报,报警方式可以为蜂鸣器警报或者警报灯、智能语音播报等,提醒现场施工人员的操作是否规范进行。
70.通信模块1000,用于将摄像采集模块500、语音收录模块600与云服务器900进行网络信息传输,通信模块1000的连接方式可为网线网络传输、无线区域覆盖或者局部网域热点覆盖,实现网络互通。
71.互动模块800,用于使终端管理人员与现场施工人员进行远程交互,互动模块800包括视频传输模块801与语音互动模块802,视频传输模块801与语音互动模块802可与云服务器900连接,实现管理人员与现场人员的视频对话,可远程调解施工程序,及时管理施工的有序进行。
72.摄像采集模块500包括第一监控摄像头501、第二监控摄像头503与状态监测模块504,状态监测模块504包括红外传感器5041,红外传感器5041监测第一监控摄像头501所在位置的红外光线辐射时的温度变化,状态监测模块504实时监控第一监控摄像头501的工作状态,在当监测到有人员触碰第一监控摄像头501时,能够及时开启第二监控摄像头503对现场画面进行实时录像,并通过通信模块1000将画面信息直接上传至云服务器900,摄像采集模块500还包括储存模块502与供能模块505,用于储存由第一监控摄像头501采集到的画面信息,便于管理人员的调取。
73.第一监控摄像头501通过电缆线与施工现场电网系统连接,供能模块505采用蓄电池及太阳电池为第二监控摄像头503提供电能。
74.本发明的工作原理及使用流程如下:通过第一监控摄像头501与语音收录模块600
采集施工现场的画面信息与语音信息,终端管理人员可通过通信模块1000与第一监控摄像头501对接实现现场画面及语音信息的远程互通,在第一监控摄像头501监控的过程中,可通过行为识别模块300结合ai智能芯片400的智能算法分析施工现场画面信息是否存在违规操作,进而代替管理人员旁站对施工现场进行远程监控,在出现违规操作时,通过预警模块200进行智能警报,提醒现场施工人员注意规范操作,同时通过通信模块1000向管理人员发出提示信息,促进现场施工人员进行规范操作;
75.在第一监控摄像头501监控的过程中,通过状态监测模块504实时监控第一监控摄像头501的工作状态,在当监测到第一监控摄像头501出现异常时,能够及时开启第二监控摄像头503代替第一监控摄像头501对现场画面进行实时录像,并通过通信模块1000将画面信息直接上传至云服务器900,方便管理人员及时查看与调取信息。
76.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1