一种防夹手机器人舱门系统及其装置的制作方法
1.本发明涉及机器人技术领域,具体涉及一种防夹手机器人舱门系统及其装置。
背景技术:
2.随着人力成本在酒店营业支出中占有更大的比重,酒店智能化并利用配送机器人完成重复性工作是行业发展的必然趋势。
3.目前,酒店配送机器人都有用于存储物件的舱体及对应舱体机构,当用户伸手存放拿取舱体内的物件时存在被舱门夹手的危险,机器人舱门关闭时对手造成夹伤。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种防夹手机器人舱门系统以解决上述的问题。
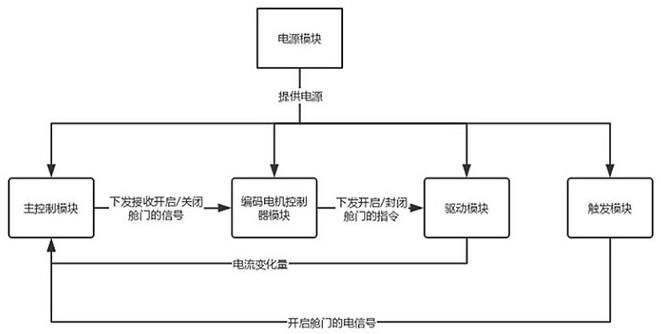
5.为实现上述目的,本发明提供了如下技术方案:一种防夹手机器人舱门系统,包括舱体,舱体包括电源模块、主控制模块、编码电机控制器模块、驱动模块、触发模块;其中电源模块用于为主控制模块、编码电机控制器模块、驱动模块、触发模块提供电源;主控制模块用于接收开启/封闭舱门的信号,并将开启/封闭舱门的信号传递至编码电机控制器模块;同时主控制模块还用于接收编码电机控制器模块反馈的驱动模块的电流变化量与触发模块产生的电信号,并控制驱动模块开启舱门;编码电机控制器模块用于接收主控制模块传递的开启/封闭舱门的信号并下发开启/封闭舱门的指令传递至驱动模块;同时编码电机控制器模块还用于检测驱动模块的电流变化量,并识别驱动模块的电流变化量,将驱动模块的电流变化量传递至主控制模块;驱动模块用于接收编码电机控制器模块传递的开启/封闭舱门的信号,并驱动舱门进行移动对舱体作开启/封闭;触发模块用于检测舱门对物件/人手的产生挤压,产生开启舱门的电信号,并将开启舱门的电信号反馈至主控制模块。
6.优选的,其方法步骤如下:步骤10:主控制模块将开启舱门的信号传递至编码电机控制器模块;步骤20:编码电机控制器模块识别主控制模块传递的开启舱门的信号,对驱动模块下发开启舱门的指令;步骤30:驱动模块接收编码电机控制器模块下发的开启舱门的指令,驱动舱门对舱体进行开启,直至完全对舱体的取物口进行开启;步骤40:取出放置在舱体内的物件;步骤50:主控制模块将封闭舱门的信号传递至编码电机控制器模块;
步骤60:编码电机控制器模块识别主控制模块传递的封闭舱门的信号,对驱动模块下发封闭舱门的指令;步骤70:驱动模块接收编码电机控制器模块下发的封闭舱门的指令,驱动舱门对舱体进行封闭,同时触发模块对舱门的关闭进行检测;步骤80:若触发模块检测舱门对物件/人手的产生挤压,常开状态的触发模块因挤压物件/人手产生压缩,并产生常开闭合的开启舱门的电信号,再将开启舱门的电信号反馈至主控制模块,同时驱动模块驱动的舱门因物件/人手的挤压,改变经过驱动模块的电流量,编码电机控制器模块检测驱动模块的电流变化量,并将驱动模块的电流变化量传递至主控制模块,主控制模块控制驱动模块对舱门进行开启,解除对物件/人手的挤压,直至物件/人手从舱体内取出;步骤90:若触发模块检测舱门未对物件/人手产生挤压,驱动舱门对舱体进行完全封闭,完成对物件从舱体的取出。
7.优选的,驱动模块包括转动件,触发模块包括触发件。
8.基于上述系统,本发明提供防夹手机器人舱门装置,包括舱体,舱体包括舱门、转动件、触发件,舱体的前端沿自身周壁设置有取物口,转动件设置于舱体的顶部,舱体的顶部设置有供转动件嵌入的放置腔,转动件的顶部与舱门相连接。
9.优选的,转动件包括编码电机、转换箱、转轴、安装块、转动块,编码电机与转换箱均设置于安装块的底部,且编码电机沿舱体的宽度方向设置,转换箱的一端与编码电机相连接,转轴沿舱体的高度方向设置于转换箱的顶部,转轴贯穿安装块且延伸至安装块的顶部外,转动块设置于安装块的顶部,且转动块与转轴相连接,安装块的外周壁与舱门的顶部固定连接。
10.优选的,转换箱的顶部与安装块的底部之间设置有若干个连接杆。
11.优选的,连接杆的数量至少为4根。
12.优选的,安装块的顶部还设置转动辅助件,转动辅助件之间的圆弧距离等于舱门的开启与封闭的移动距离。
13.优选的,触发件包括安全触边,安全触边设置于取物口的开口处,安全触边用于舱门对取物口作封闭且有物件/人手处于安全触边与舱门之间时提供控制器的触发信号。
14.优选的,安全触边为弹性材料。
15.本发明具备的有益技术效果是:通过编码电机在主控制器与编码电机控制器的作用下实现反转,使被卡住的物件/人手能够正常从取物口中拿出,保证人手安全,且防止物件由于挤压造成的损坏。
附图说明
16.图1为本发明的整体结构流程图;图2为本发明的整体结构示意图;图3为本发明的舱体结构示意图;图4为本发明的转动件结构示意图;图5为本发明的转动件结构主视图;图6为本发明的紫外消毒装置结构示意图。
17.附图标记:1、舱体;11、储物腔;12、取物口;13、放置腔;14、舱门;15、紫外消毒装置;16、液体消毒装置;17、安置台;2、电源模块;3、主控制模块;4、编码电机控制器模块;5、驱动模块;51、转动件;511、编码电机;512、转换箱;5121、连接杆;513、转轴;514、安装块;5141、转动辅助件;515、转动块;6、触发模块;61、触发件;6111、安全触边。
具体实施方式
18.下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
19.本实施例中:参照图1-6所示,一种防夹手机器人舱门装置,包括舱体1,舱体1包括电源模块2、主控制模块3、编码电机511控制器模块4、驱动模块5、触发模块6;其中电源模块2用于为主控制模块3、编码电机511控制器模块4、驱动模块5、触发模块6提供电源;主控制模块3用于接收开启/封闭舱门14的信号,并将开启/封闭舱门14的信号传递至编码电机511控制器模块4;同时主控制模块3还用于接收编码电机511控制器模块4反馈的驱动模块5的电流变化量与触发模块6产生的电信号,并控制驱动模块5开启舱门14;编码电机511控制器模块4用于接收主控制模块3传递的开启/封闭舱门14的信号并下发开启/封闭舱门14的指令传递至驱动模块5;同时编码电机511控制器模块4还用于检测驱动模块5的电流变化量,并识别驱动模块5的电流变化量,将驱动模块5的电流变化量传递至主控制模块3;驱动模块5用于接收编码电机511控制器模块4传递的开启/封闭舱门14的信号,并驱动舱门14进行移动对舱体1作开启/封闭;触发模块6用于检测舱门14对物件/人手的产生挤压,产生开启舱门14的电信号,并将开启舱门14的电信号反馈至主控制模块3。
20.舱体1包括舱门14、转动件51、触发件61、辅助连接件、紫外消毒装置15、液体消毒装置16,舱体1的内部形成有用于储存物件的储物腔11,舱体1的前端设置有弧形段,并在弧形段上开设取物口12,储物腔11内有消毒配送物件的消毒腔。
21.转动件51包括编码电机511、转换箱512、转轴513、安装块514、转动块515,编码电机511为伺服电机,转换箱512呈长方形壳体,且转换箱512内设置有齿轮组,齿轮组用于将编码电机511的转动方向进行转换,从而带动转轴513进行转动,编码电机511与转换箱512均设置于安装块514的底部,且编码电机511沿舱体1的宽度方向设置,转换箱512的一端与编码电机511相连接,转轴513沿舱体1的高度方向设置于转换箱512的顶部,转轴513贯穿安装块514且延伸至安装块514的顶部外,安装块514呈长方形,转换箱512的顶部与安装块514的底部之间设置有若干个连接杆5121,连接杆5121设置于转换箱512的顶部的四角处,且连接杆5121的上下两端分别与转换箱512、安装块514进行焊接,安装块514的中部设置有供转轴513贯穿的通孔,转动块515呈圆柱形,转动块515设置于安装块514的顶部,且转动块515
与转轴513相连接,安装块514的外周壁与转动连接件固定连接。
22.安装块514的顶部还设置转动辅助件5141,转动辅助件5141均包括辅助连接块、辅助轮、以及用于将辅助轮与辅助连接块进行安装的辅助连接架,辅助轮延伸至安装块514外,转动辅助件5141之间的圆弧距离等于舱门14的开启与封闭的移动距离,转动辅助件5141用于在舱门14进行转动时辅助舱门14进行转动,防止舱门14在转动时与安装块514进行摩擦,导致舱门14安装块514的损坏。
23.触发件61包括安全触边6111,安全触边6111呈长方形,且安全触边6111为弹性材料,安全触边6111设置于舱门14的开口处,安全触边6111用于舱门14对舱门14作封闭且有异物处于安全触边6111与舱门14之间时提供控制器的触发信号。
24.转动连接件包括第一转动连接块、第二转动连接块、第三转动连接块,第一转动连接块、第二转动连接块均呈扇形,且第一转动连接块的圆弧长度小于第二转动连接块的圆弧长度,第三转动连接块呈圆弧形,且第三转动连接块的上下两端的圆弧长度分别于第一转动连接块、第二转动连接块相适配,第一转动连接块设置于转动块515的顶部,第二转动连接块设置于舱门14的顶部,第三转动连接块设置于第一转动连接块与第二转动连接块之间,第三转动连接块用于将第一转动连接块的外周壁的一端与第二转动连接块背离舱门14的一端作安装。
25.紫外消毒装置15包括“u”型uvc紫外线led,其设置在舱体1顶部,紫外灯与控制装置电连接。紫外灯设置在舱体1顶部,舱体1底部四周可以加装反光板,用于将紫外光反射至配送物体下方,形成全方位的消毒效果。
26.液体消毒装置16包括喷嘴、液泵和储液罐。喷嘴为雾化喷嘴,位于消毒腔顶部,喷口朝向安置台17。储液罐呈长方体盒装,上端有供补充消毒液体的开口。其固定连接在舱体1上,通过液泵与喷嘴相连。储液罐内储存有含有酒精的消毒液体。
27.安置台17包括八根滚动杆和用于驱动滚动杆的电机。八根滚动杆垂直于出入口布置在腔体底部,并与腔体底部转动连接。在最左边和最右边的滚动杆的一端,通过皮带与电机相连,使电机能够通过皮带带动最左边和最右边的滚动杆转动。在八根滚动杆上还覆有带孔纱网,最左边和最右边的滚动杆上有与带孔纱网配合的凸起。带孔纱网有一定的液体吸附能力,能对配送物品下表面进行酒精消毒处理。
28.电源模块2选用高容量可充电的锂电池,为装置整体提供能源。
29.使用时按照以下步骤进行使用:步骤10:打开舱体1上的舱门14;步骤20:将物件置于舱体1的储物腔11和消毒腔内上;步骤30:关闭舱门14;通过主控制器下发指令至编码电机511控制器,编码电机511控制器控制编码电机511进行运作,并通过转动箱的齿轮组的作用使编码电机511带动转动进行转动,使转动进行转动,从而带动转动块515进行转动,直至舱门14对舱门14进行开启/封闭,当物件/人手被舱门14夹住时,舱门14对物件/人手进行挤压,物件/人手被舱门14挤压时对安全触边6111进行挤压,使安全触边6111发生形变,从而使常开状态下的安全触边6111因物件/人手的挤压产生常开闭合的电信号,同时舱门14由于物件/人手造成堵塞无法对舱门14进行封闭,导致编码电机511的转速因堵塞降低,电流增大,编码电机511控制器检测到编码电机511的电流增大的信号,并将该信号与电信号传输至主控制器,从而对发出改
变编码电机511转向的指令至编码电机511的控制器,停止对舱门14的封闭方向的转动,且反向转动一定角度,使被卡住的物件/人手能够正常从舱门14中拿出,保证人手安全,且防止物件由于挤压造成的损坏,同时通过转动转动辅助件5141的设置,防止舱门14在转动时与安装块514进行摩擦,导致舱门14/安装块514的损坏。
30.步骤50:启动紫外消毒装置15和液体消毒装置16对物件进行消毒;紫外线消毒装置实施消毒的时间大于15分钟。紫外线消毒的时间控制在15分钟至20分钟之间为佳,时间过短容易造成消毒不够彻底,时间过长容易造成舱体1内空间升温,影响到配送中的低温物件。液体消毒装置16实施消毒的时间小于10分钟。液体消毒装置16时间控制在10分钟之内,可以配合15分钟到20分钟的紫外线消毒工序,若两者同时启动,则会有5分钟到10分钟的时间供配送物件表面的消毒液珠挥发。保证在配送完成取出时,配送物件上不会有明显的消毒液液体。安置台17在液体消毒装置16喷出消毒液体时工作,转动安置台17的滚动杆,使消毒液体能对物体底部生效。滚动杆滚动,将配送物件部分与滚动杆接触的底部移动至不与滚动杆接触从而暴露在舱体1内带有消毒液体小液滴的空气中。
31.步骤60:完成消毒后关闭紫外消毒装置15和液体消毒装置16;步骤70:打开舱体1上的舱门14;步骤80:取出储物腔11和消毒腔内消毒后的物体;步骤90:关闭舱门14。通过主控制器下发指令至编码电机511控制器,编码电机511控制器控制编码电机511进行运作,并通过转动箱的齿轮组的作用使编码电机511带动转动进行转动,使转动进行转动,从而带动转动块515进行转动,直至舱门14对舱门14进行开启/封闭,当物件/人手被舱门14夹住时,舱门14对物件/人手进行挤压,物件/人手被舱门14挤压时对安全触边6111进行挤压,使安全触边6111发生形变,从而使常开状态下的安全触边6111因物件/人手的挤压产生常开闭合的电信号,同时舱门14由于物件/人手造成堵塞无法对舱门14进行封闭,导致编码电机511的转速因堵塞降低,电流增大,编码电机511控制器检测到编码电机511的电流增大的信号,并将该信号与电信号传输至主控制器,从而对发出改变编码电机511转向的指令至编码电机511的控制器,停止对舱门14的封闭方向的转动,且反向转动一定角度,使被卡住的物件/人手能够正常从舱门14中拿出,保证人手安全,且防止物件由于挤压造成的损坏,同时通过转动转动辅助件5141的设置,防止舱门14在转动时与安装块514进行摩擦,导致舱门14/安装块514的损坏。
32.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1