一种基于物联网控制的电力系统检修机器人的制作方法
1.本发明涉及电气施工技术领域,更具体地说,涉及一种基于物联网控制的电力系统检修机器人。
背景技术:
2.人们在电力系统的维护、检修工作中面临各种难题,实际操作的不稳定因素较多,安全风险如影随形。因此,将机器人技术与电力行业应用相结合,针对电网建设、运行与检修的各个环节,研究电力特种机器人,替代人工从事急、难、险、重和重复性劳动,为电力系统故障防范、在线检修、提高供电可靠性等提供技术保障十分重要。而夜间工况光线极暗时,需要开启探照光源来加强视野清晰度,但由于夜间飞虫较多且其自身具有趋光性,聚集在监测设备镜头前会导致检修机器人根本无法获得准确信息。现有技术公开号为cn109412071a的文献提供一种电力检修机器人,该装置设有矩形机身,矩形机身的顶侧设有锥形收纳罩,空心轴连接在矩形机身内部的主电机上;矩形机身的表面设有副电机和主油缸,的副电机和主油缸之间设有线轮,线轮由两个柱形的转轮和转轮的轮轴拼接而成,矩形机身内设有单片机控制中心,的单片机控制中心连接主电机、副电机、主油缸和副油缸。
3.虽然该装置有益效果较多,但依然存在下列问题:该装置在夜间使用时,由于夜间飞虫较多且其自身具有趋光性,聚集在监测设备镜头前会导致检修机器人根本无法获得准确信息,鉴于此,我们提出一种基于物联网控制的电力系统检修机器人。
技术实现要素:
4.1.要解决的技术问题
5.本发明的目的在于提供一种基于物联网控制的电力系统检修机器人,以解决上述背景技术中提出的问题。
6.2.技术方案
7.一种基于物联网控制的电力系统检修机器人,包括检修主体,所述检修主体底面四角处均设有滚轮,所述检修主体上侧左端设有红外线感应器,所述检修主体上侧右端设有图像识别摄像机,所述检修主体上侧前端中间位置嵌设有圆形块,所述圆形块内部开设有空槽,所述空槽内部上侧固设有限位盘,所述限位盘上侧靠近边缘处呈环形等间距设有多个支撑杆,所述空槽内部下侧设有电机a,所述电机a输出轴穿过限位盘底面延伸至外部并套接有转柱,所述转柱上侧对称设有两个限位耳,两个所述限位耳之间中部转动连接有转轴,所述转轴其中一端穿过限位耳内壁延伸至外部并套接有传动斜齿轮,所述圆形块上方设有环形轨道,所述环形轨道圆周外壁中部设有环形齿条,所述环形轨道内部通过固定杆固设有收虫柱,所述收虫柱左侧开设有圆形腔,所述收虫柱后侧中部开设有机腔,所述机腔内部设有电机b,所述电机b输出端穿过机腔内部延伸至机腔内部并套接有密封柱,所述密封柱圆周外壁下侧对称设有两个弧形铰座,所述弧形铰座外侧通过销轴转动连接有弧形板,所述圆形腔圆周内壁前侧连通有方形吸头,所述圆形腔圆周内壁后侧连通有集虫斗,所
述集虫斗后侧呈线性等间距开设有多个网孔。
8.优选地,多个所述支撑杆上侧固设有空心斜齿轮,所述空心斜齿轮与传动斜齿轮啮合连接。
9.优选地,所述限位耳内侧上端开设有弧形槽a,所述弧形槽a与环形轨道滑动连接。
10.优选地,所述转轴圆周外壁套接有传动齿轮,所述传动齿轮与环形齿条啮合连接。
11.优选地,所述圆形腔圆周内壁下侧对称开设有弧形槽b,所述弧形槽b与所述弧形板下端通过销轴转动连接。
12.优选地,所述密封柱为偏心结构设置,所述密封柱、弧形铰座及弧形板尺寸大小与所述圆形腔尺寸大小相适配。
13.3.有益效果
14.相比于现有技术,本发明的优点在于:
15.1.本发明通过在环形轨道内部通过固定杆固设有收虫柱,收虫柱左侧开设有圆形腔,收虫柱后侧中部开设有机腔,机腔内部设有电机b,电机b输出端穿过机腔内部延伸至机腔内部并套接有密封柱,密封柱圆周外壁下侧对称设有两个弧形铰座,弧形铰座外侧通过销轴转动连接有弧形板,圆形腔圆周内壁前侧连通有方形吸头,结构间的紧密配合,使得该装置可以通过方形吸头对设备镜头周边的蚊虫进行吸收逮捕,避免了夜间使用时,由于夜间飞虫较多且其自身具有趋光性,聚集在监测设备镜头前会导致检修机器人根本无法获得准确信息的情况。
16.2.本发明通过在检修主体上侧前端中间位置嵌设有圆形块,圆形块内部开设有空槽,空槽内部上侧固设有限位盘,限位盘上侧靠近边缘处呈环形等间距设有多个支撑杆,电机a输出轴穿过限位盘底面延伸至外部并套接有转柱,两个限位耳之间中部转动连接有转轴,转轴其中一端穿过限位耳内壁延伸至外部并套接有传动斜齿轮,环形轨道圆周外壁中部设有环形齿条,通过设置环形轨道,使得方形吸头可以进行公转及自传对两侧进周边的蚊虫进行处理,有效的扩大了处理的范围,提高了处理的效率。
17.3.本发明通过在圆形腔圆周内壁后侧连通有集虫斗,集虫斗后侧呈线性等间距开设有多个网孔,通过集虫斗的设计,使得蚊虫被由于风力的作用被处理到集虫斗内部进行收集;多个支撑杆上侧固设有空心斜齿轮,空心斜齿轮与传动斜齿轮啮合连接,空心斜齿轮的设计,使得传动斜齿轮在公转后可以进行自转,从而带动传动齿轮转动;密封柱为偏心结构设置,密封柱、弧形铰座及弧形板尺寸大小与圆形腔尺寸大小相适配,而密封柱为偏心结构的设置,使得密封柱始终会贴合圆形腔内壁,从而封层两个空腔,从而通过负压作用进行吸气动作。
附图说明
18.图1为本发明的整体结构示意图;
19.图2为本发明的圆形块结构展开图;
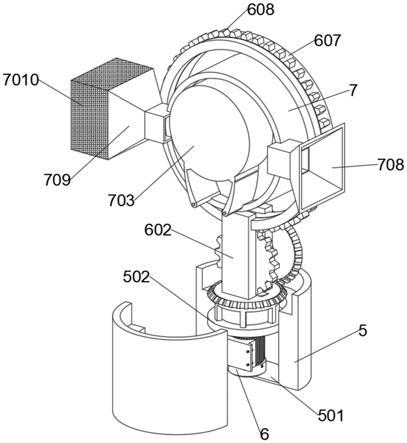
20.图3为本发明的收虫柱结构剖面图;
21.图4为本发明的限位耳结构拆分图;
22.图5为本发明的限位盘结构拆分图;
23.图中标号说明:1、检修主体;2、滚轮;3、红外线感应器;4、图像识别摄像机;5、圆形
块;501、空槽;502、限位盘;503、支撑杆;504、空心斜齿轮;6、电机a;601、转柱;602、限位耳;603、弧形槽a;604、转轴;605、传动齿轮;606、传动斜齿轮;607、环形轨道;608、环形齿条;7、收虫柱;701、机腔;702、电机b;703、密封柱;704、弧形铰座;705、弧形板;706、圆形腔;707、弧形槽b;708、方形吸头;709、集虫斗;7010、网孔。
具体实施方式
24.请参阅图1-5,本发明提供一种技术方案:
25.一种基于物联网控制的电力系统检修机器人,包括检修主体1,检修主体1底面四角处均设有滚轮2,检修主体1上侧左端设有红外线感应器3,检修主体1上侧右端设有图像识别摄像机4,检修主体1上侧前端中间位置嵌设有圆形块5,圆形块5内部开设有空槽501,空槽501内部上侧固设有限位盘502,限位盘502上侧靠近边缘处呈环形等间距设有多个支撑杆503,空槽501内部下侧设有电机a6,电机a6输出轴穿过限位盘502底面延伸至外部并套接有转柱601,转柱601上侧对称设有两个限位耳602,两个限位耳602之间中部转动连接有转轴604,转轴604其中一端穿过限位耳602内壁延伸至外部并套接有传动斜齿轮606,圆形块5上方设有环形轨道607,环形轨道607圆周外壁中部设有环形齿条608,环形轨道607内部通过固定杆固设有收虫柱7,收虫柱7左侧开设有圆形腔706,收虫柱7后侧中部开设有机腔701,机腔701内部设有电机b702,电机b702输出端穿过机腔701内部延伸至机腔701内部并套接有密封柱703,密封柱703圆周外壁下侧对称设有两个弧形铰座704,弧形铰座704外侧通过销轴转动连接有弧形板705,圆形腔706圆周内壁前侧连通有方形吸头708,圆形腔706圆周内壁后侧连通有集虫斗709,集虫斗709后侧呈线性等间距开设有多个网孔7010。结构间的紧密配合,使得该装置可以通过方形吸头708对设备镜头周边的蚊虫进行吸收逮捕,避免了夜间使用时,由于夜间飞虫较多且其自身具有趋光性,聚集在监测设备镜头前会导致检修机器人根本无法获得准确信息的情况。
26.具体的,多个支撑杆503上侧固设有空心斜齿轮504,空心斜齿轮504与传动斜齿轮606啮合连接。空心斜齿轮504的设计,使得传动斜齿轮606在公转后可以进行自转,从而带动传动齿轮605转动。
27.进一步的,限位耳602内侧上端开设有弧形槽a603,弧形槽a603与环形轨道607滑动连接,弧形槽a603的设计,使得环形轨道607进行圆周转动,从而带动方形吸头708转动。
28.再进一步的,转轴604圆周外壁套接有传动齿轮605,传动齿轮605与环形齿条608啮合连接。通过传动齿轮605转动,从而带动环形齿条608转动,从而使得环形轨道607进行圆周转动。
29.更进一步的,圆形腔706圆周内壁下侧对称开设有弧形槽b707,弧形槽b707与弧形板705下端通过销轴转动连接。使得弧形板705可以进行转动,从而适应密封柱703的偏心转动。
30.值得说明的是,密封柱703为偏心结构设置,密封柱703、弧形铰座704及弧形板705尺寸大小与圆形腔706尺寸大小相适配。而密封柱703为偏心结构的设置,使得密封柱703始终会贴合圆形腔706内壁,从而封层两个空腔,从而通过负压作用进行吸气动作。
31.工作原理:当需要该基于物联网控制的电力系统检修机器人时,在使用时,通过电机b702输出轴转动,由于电机b702输出端穿过机腔701内部延伸至机腔701内部并套接有密
封柱703,密封柱703圆周外壁下侧对称设有两个弧形铰座704,弧形铰座704外侧通过销轴转动连接有弧形板705,而圆形腔706圆周内壁下侧对称开设有弧形槽b707,弧形槽b707与弧形板705下端通过销轴转动连接,使得弧形板705可以进行转动,从而适应密封柱703的偏心转动,密封柱703为偏心结构设置,密封柱703、弧形铰座704及弧形板705尺寸大小与圆形腔706尺寸大小相适配,而密封柱703为偏心结构的设置,使得密封柱703始终会贴合圆形腔706内壁,从而封层两个空腔,从而通过负压作用进行吸气动作,同时,由于电机a6输出轴转动,由于电机a6输出轴穿过限位盘502底面延伸至外部并套接有转柱601,转柱601上侧对称设有两个限位耳602,而限位耳602内侧上端开设有弧形槽a603,弧形槽a603与环形轨道607滑动连接,弧形槽a603的设计,使得环形轨道607进行圆周转动,配合多个支撑杆503上侧固设有空心斜齿轮504,空心斜齿轮504与传动斜齿轮606啮合连接,空心斜齿轮504的设计,使得传动斜齿轮606在公转后可以进行自转,从而带动传动齿轮605转动,转轴604圆周外壁套接有传动齿轮605,传动齿轮605与环形齿条608啮合连接。通过传动齿轮605转动,从而带动环形齿条608转动,从而使得环形轨道607进行圆周转动,此时,带动方形吸头708公转及自转。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1