含变杆长平行四边形闭环子链的四自由度并联机器人
1.本发明涉及工业机器人领域,特别是一种含变杆长平行四边形闭环子链的四自由度并联机器人。
背景技术:
2.并联机器人和串联机器人一起构成工业机器人的重要部分,并联机器人具有刚度高、速度快、柔性强、重量轻等优点,在食品、医药、电子等轻工业中应用最为广泛,在物料的搬运、包装、分拣等方面有着无可比拟的优势。随着并联机器人在市场中的应用日益广泛,已成为工业机器人需求增长的新生力量。并联机器人是由动平台、静平台以及连接动平台和静平台的两个或两个以上独立运动支链组成的闭环系统,与传统串联机器人相比,并联机器人没有误差累积,运动精度高,驱动可以布置在静平台附近,运动惯量小,动态性好等优点。
3.目前具有三平动一转动自由度的四自由度并联机器人在物料搬取、表面装配、零件加工等工业领域具有广泛应用。为了满足更多的工业需求,相继发明了四支链的h4、i4、heli4及par4等机构,其中具有四支链、双动平台的可实现scara运动的h4型并联机构成功实现商业化,典型代表产品如adept quattro系列,但是该类并联机构也存在运动构件多、运动学复杂等特点。除此之外,清华大学也提出一种对称的四支链四自由度并联机构,结构简单且具有单动平台,但工作空间较小。本发明采用四条支链连接机架和动平台每条支链含有可伸缩平行四边形闭环子链,动平台可完成在空间上的三维平动和一维转动的运动,具有结构简单,工作空间大,精度高,速度快等优点。
技术实现要素:
4.本发明为解决公知技术中存在的技术问题而提供一种可实现三维平动一维转动的四自由度并联机器人。
5.为达到上述发明创造目的,本发明采用如下技术方案:含变杆长平行四边形闭环子链的四自由度并联机器人包括机架0、第一支链1、第二支链2、第三支链3、第四支链4、第一电机110、第二电机210、第三电机310、第四电机410和动平台5。
6.所述第一支链1包括第一主动杆112、第一连杆116、第二连杆117、第三连杆120、第四连杆121、第一连接件122、第二连接件113,第一连杆116通过第一转动副114与第一主动杆112连接,第二连杆117通过第二转动副115与第一主动杆112连接,第一连接件122通过第三转动副123与第一连杆116连接,第一连接件122通过第四转动副124与第二连杆117连接,第三连杆120通过第一移动副118与第一连杆116连接,第四连杆121通过第二移动副119与第二连杆117连接,第二连接件113通过第一球铰125与第三连杆120连接,第二连接件113通过第二球铰126与第四连杆121连接;所述第一支链1的第一主动杆112通过第一零一转动副111与第一电机110连接,所述第一电机110固定在机架0上,所述第一支链1的第二连接件
113通过一零二转动副51与动平台5连接,第一零一转动副111轴线与第一转动副114轴线垂直,第一零一转动副111轴线与第二转动副115轴线垂直,第一转动副114、第二转动副115、第三转动副123和第四转动副124的轴线相互平行,第一转动副114轴线和第二转动副115轴线的距离与第三转动副123轴线和第四转动副124轴线的距离相等,第一转动副114轴线和第二转动副115轴线的距离与第一球铰125中心和第二球铰126中心的距离相等,第一球铰125中心到第一转动副114轴线的距离与第二球铰126中心到第二转动副115轴线的距离相等。
7.所述第二支链2包括第二主动杆212、第五连杆216、第六连杆217、第七连杆220、第八连杆221、第三连接件222、第四连接件213,第五连杆216通过第五转动副214与第二主动杆212连接,第六连杆217通过第六转动副215与第二主动杆212连接,第三连接件222通过第七转动副223与第五连杆216连接,第三连接件222通过第八转动副224与第六连杆217连接,第七连杆220通过第三移动副218与第五连杆216连接,第八连杆221通过第四移动副219与第六连杆217连接,第四连接件213通过第三球铰225与第七连杆220连接,第四连接件213通过第四球铰226与第八连杆221连接;所述第二支链2的第二主动杆212通过第二零一转动副211与第二电机210连接,所述第二电机210固定在机架0上,所述第二支链2的第四连接件213通过二零二转动副52与动平台5连接,第二零一转动副211轴线与第五转动副214轴线垂直,第二零一转动副211轴线与第六转动副215轴线垂直,第五转动副214、第六转动副215、第七转动副223和第八转动副224的轴线相互平行,第五转动副214轴线和第六转动副215轴线的距离与第七转动副223轴线和第八转动副224轴线的距离相等,第五转动副214轴线和第六转动副215轴线的距离与第三球铰225中心和第四球铰226中心的距离相等,第三球铰225中心到第五转动副214轴线的距离与第四球铰226中心到第六转动副215轴线的距离相等。
8.所述第三支链3包括第三主动杆312、第九连杆316、第十连杆317、第十一连杆320、第十二连杆321、第五连接件322、第六连接件313,第九连杆316通过第九转动副314与第三主动杆312连接,第十连杆317通过第十转动副315与第三主动杆312连接,第五连接件322通过第十一转动副323与第九连杆316连接,第五连接件322通过第十二转动副324与第十连杆317连接,第十一连杆320通过第五移动副318与第九连杆316连接,第十二连杆321通过第六移动副319与第十连杆317连接,第六连接件313通过第五球铰325与第十一连杆320连接,第六连接件313通过第六球铰326与第十二连杆321连接;所述第三支链3的第三主动杆312通过第三零一转动副311与第三电机310连接,所述第三电机310固定在机架0上,所述第三支链3的第六连接件313通过三零二转动副53与动平台5连接,第三零一转动副311轴线与第九转动副314轴线垂直,第三零一转动副311轴线与第十转动副315轴线垂直,第九转动副314、第十转动副315、第十一转动副323和第十二转动副324的轴线相互平行,第九转动副314轴线和第十转动副315轴线的距离与第十一转动副323轴线和第十二转动副324轴线的距离相等,第九转动副314轴线和第十转动副315轴线的距离与第五球铰325中心和第六球铰326中心的距离相等,第五球铰325中心到第九转动副314轴线的距离与第六球铰326中心到第十转动副315轴线的距离相等。
9.所述第四支链4包括第四主动杆412、第十三连杆416、第十四连杆417、第十五连杆420、第十六连杆421、第七连接件422、第八连接件413,第十三连杆416通过第十三转动副
414与第四主动杆412连接,第十四连杆417通过第十四转动副415与第四主动杆412连接,第七连接件422通过第十五转动副423与第十三连杆416连接,第七连接件422通过第十六转动副424与第十四连杆417连接,第十五连杆420通过第七移动副418与第十三连杆416连接,第十六连杆421通过第八移动副419与第十四连杆417连接,第八连接件413通过第七球铰425与第十五连杆420连接,第八连接件413通过第八球铰426与第十六连杆421连接;所述第四支链4的第四主动杆412通过第四零一转动副411与第四电机410连接,所述第四电机410固定在机架0上,所述第四支链4的第八连接件413通过四零二转动副54与动平台5连接,第四零一转动副411轴线与第十三转动副414轴线垂直,第四零一转动副411轴线与第十四转动副415轴线垂直,第十三转动副414、第十四转动副415、第十五转动副423和第十六转动副424的轴线相互平行,第十三转动副414轴线和第十四转动副415轴线的距离与第十五转动副423轴线和第十六转动副424轴线的距离相等,第十三转动副414轴线和第十四转动副415轴线的距离与第七球铰425中心和第八球铰426中心的距离相等,第七球铰425中心到第十三转动副414轴线的距离与第八球铰426中心到第十四转动副415轴线的距离相等。
10.本发明与现有技术相比较,具有如下显而易见的突出实质性特点和显著优点:1.本发明一种含变杆长平行四边形闭环子链的四自由度并联机器人具有结构简单对称,且由于驱动装置安装在机架上,机构的运动惯量小和动力学性能好的优点;2.本发明装置结构简单,速度快,运动能力灵活,动平台上可安装多种执行器,易于推广应用。
附图说明
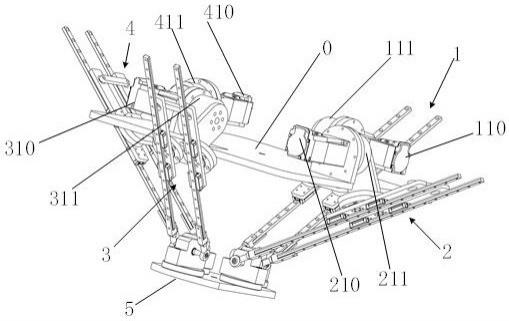
11.图1为本发明所述含变杆长平行四边形闭环子链的四自由度并联机器人的结构示意图。
12.图2为本发明所述含变杆长平行四边形闭环子链的四自由度并联机器人第一支链结构示意图。
13.图3为本发明所述含变杆长平行四边形闭环子链的四自由度并联机器人第二支链结构示意图。
14.图4为本发明所述含变杆长平行四边形闭环子链的四自由度并联机器人第三支链结构示意图。
15.图5为本发明所述含变杆长平行四边形闭环子链的四自由度并联机器人第四支链结构示意图。
16.图6为本发明所述含变杆长平行四边形闭环子链的四自由度并联机器人动平台结构示意图。
具体实施方式
17.下面结合附图及实施例对本发明的技术方案作进一步说明。
18.请参阅图1~图6,含变杆长平行四边形闭环子链的四自由度并联机器人包括包括机架0、第一支链1、第二支链2、第三支链3、第四支链4、第一电机110、第二电机210、第三电机310、第四电机410和动平台5。
19.所述第一支链1包括第一主动杆112、第一连杆116、第二连杆117、第三连杆120、第
四连杆121、第一连接件122、第二连接件113,第一连杆116通过第一转动副114与第一主动杆112连接,第二连杆117通过第二转动副115与第一主动杆112连接,第一连接件122通过第三转动副123与第一连杆116连接,第一连接件122通过第四转动副124与第二连杆117连接,第三连杆120通过第一移动副118与第一连杆116连接,第四连杆121通过第二移动副119与第二连杆117连接,第二连接件113通过第一球铰125与第三连杆120连接,第二连接件113通过第二球铰126与第四连杆121连接;所述第一支链1的第一主动杆112通过第一零一转动副111与第一电机110连接,所述第一电机110固定在机架0上,所述第一支链1的第二连接件113通过一零二转动副51与动平台5连接,第一零一转动副111轴线与第一转动副114轴线垂直,第一零一转动副111轴线与第二转动副115轴线垂直,第一转动副114、第二转动副115、第三转动副123和第四转动副124的轴线相互平行,第一转动副114轴线和第二转动副115轴线的距离与第三转动副123轴线和第四转动副124轴线的距离相等,第一转动副114轴线和第二转动副115轴线的距离与第一球铰125中心和第二球铰126中心的距离相等,第一球铰125中心到第一转动副114轴线的距离与第二球铰126中心到第二转动副115轴线的距离相等。
20.所述第二支链2包括第二主动杆212、第五连杆216、第六连杆217、第七连杆220、第八连杆221、第三连接件222、第四连接件213,第五连杆216通过第五转动副214与第二主动杆212连接,第六连杆217通过第六转动副215与第二主动杆212连接,第三连接件222通过第七转动副223与第五连杆216连接,第三连接件222通过第八转动副224与第六连杆217连接,第七连杆220通过第三移动副218与第五连杆216连接,第八连杆221通过第四移动副219与第六连杆217连接,第四连接件213通过第三球铰225与第七连杆220连接,第四连接件213通过第四球铰226与第八连杆221连接;所述第二支链2的第二主动杆212通过第二零一转动副211与第二电机210连接,所述第二电机210固定在机架0上,所述第二支链2的第四连接件213通过二零二转动副52与动平台5连接,第二零一转动副211轴线与第五转动副214轴线垂直,第二零一转动副211轴线与第六转动副215轴线垂直,第五转动副214、第六转动副215、第七转动副223和第八转动副224的轴线相互平行,第五转动副214轴线和第六转动副215轴线的距离与第七转动副223轴线和第八转动副224轴线的距离相等,第五转动副214轴线和第六转动副215轴线的距离与第三球铰225中心和第四球铰226中心的距离相等,第三球铰225中心到第五转动副214轴线的距离与第四球铰226中心到第六转动副215轴线的距离相等。
21.所述第三支链3包括第三主动杆312、第九连杆316、第十连杆317、第十一连杆320、第十二连杆321、第五连接件322、第六连接件313,第九连杆316通过第九转动副314与第三主动杆312连接,第十连杆317通过第十转动副315与第三主动杆312连接,第五连接件322通过第十一转动副323与第九连杆316连接,第五连接件322通过第十二转动副324与第十连杆317连接,第十一连杆320通过第五移动副318与第九连杆316连接,第十二连杆321通过第六移动副319与第十连杆317连接,第六连接件313通过第五球铰325与第十一连杆320连接,第六连接件313通过第六球铰326与第十二连杆321连接;所述第三支链3的第三主动杆312通过第三零一转动副311与第三电机310连接,所述第三电机310固定在机架0上,所述第三支链3的第六连接件313通过三零二转动副53与动平台5连接,第三零一转动副311轴线与第九转动副314轴线垂直,第三零一转动副311轴线与第十转动副315轴线垂直,第九转动副314、
第十转动副315、第十一转动副323和第十二转动副324的轴线相互平行,第九转动副314轴线和第十转动副315轴线的距离与第十一转动副323轴线和第十二转动副324轴线的距离相等,第九转动副314轴线和第十转动副315轴线的距离与第五球铰325中心和第六球铰326中心的距离相等,第五球铰325中心到第九转动副314轴线的距离与第六球铰326中心到第十转动副315轴线的距离相等。
22.所述第四支链4包括第四主动杆412、第十三连杆416、第十四连杆417、第十五连杆420、第十六连杆421、第七连接件422、第八连接件413,第十三连杆416通过第十三转动副414与第四主动杆412连接,第十四连杆417通过第十四转动副415与第四主动杆412连接,第七连接件422通过第十五转动副423与第十三连杆416连接,第七连接件422通过第十六转动副424与第十四连杆417连接,第十五连杆420通过第七移动副418与第十三连杆416连接,第十六连杆421通过第八移动副419与第十四连杆417连接,第八连接件413通过第七球铰425与第十五连杆420连接,第八连接件413通过第八球铰426与第十六连杆421连接;所述第四支链4的第四主动杆412通过第四零一转动副411与第四电机410连接,所述第四电机410固定在机架0上,所述第四支链4的第八连接件413通过四零二转动副54与动平台5连接,第四零一转动副411轴线与第十三转动副414轴线垂直,第四零一转动副411轴线与第十四转动副415轴线垂直,第十三转动副414、第十四转动副415、第十五转动副423和第十六转动副424的轴线相互平行,第十三转动副414轴线和第十四转动副415轴线的距离与第十五转动副423轴线和第十六转动副424轴线的距离相等,第十三转动副414轴线和第十四转动副415轴线的距离与第七球铰425中心和第八球铰426中心的距离相等,第七球铰425中心到第十三转动副414轴线的距离与第八球铰426中心到第十四转动副415轴线的距离相等。
23.第一电机110驱动第一支链1的第一主动杆112运动,第二电机210驱动第二支链2的第二主动杆212运动,第三电机310驱动第三支链3的第三主动杆312运动,第四电机410驱动第四支链4的第四主动杆412运动可实现动平台5的空间三维平动和一维转动的运动。
24.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡依据本发明技术方案的精神实质和原理下做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本发明的发明目的,不背离本发明含变杆长平行四边形闭环子链的四自由度并联机器人的技术原理和发明构思,都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1