中空型无限旋转电动夹爪
1.本发明涉及电动夹爪技术领域,具体涉及中空型无限旋转电动夹爪。
背景技术:
2.电动旋转夹爪目前正有望广泛应用于自动化装备、机器人及医疗自动化装备中,但是在灌装、弯管、异型钢丝件成型和旋长螺丝等领域中还存在较大难题,现有设备体积庞大,集成度低,这主要是因为这些行业应用中需要将进料头深入夹爪内部并穿出夹爪,方便给下部容器或设备智能进料,进料完成后希望能够在较小移动或不移动进料头的前提下迅速夹紧并做旋转运动,如给容器盖上瓶盖、翻转成型的异型钢丝件等。亦或是对于旋长螺丝技术领域,因为螺母向下有较长的行程,如果设置过长的夹紧手指实现避空设计,但使用过程中常常因为设计的手指过长,需要承受较大的弯矩和扭矩,从而大大缩短了夹爪或夹爪手指的使用寿命,可靠性差。然而截止目前为止还没有中空型无滑环式电动无限旋转夹爪被公开,因此实有必要开发一种中空型电动无限旋转夹爪来满足不同行业的应用需求。
技术实现要素:
3.针对现有技术中存在的上述问题,本发明的目的在于提供一种结构紧凑、驱控一体的中空型无限旋转电动夹爪。
4.本发明的技术方案如下:中空型无限旋转电动夹爪,其特征在于,包括电动旋转组件、中空电动推拉组件、中空夹爪组件及控制组件,所述电动旋转组件与中空夹爪组件相连,用于驱动中空夹爪组件进行旋转动作;所述中空电动推拉组件与中空夹爪组件相连且相通,并用于驱动中空夹爪组件进行抓夹动作;所述控制组件分别与电动旋转组件及中空电动推拉组件电信号连接,用于控制电动旋转组件及中空电动推拉组件动作。
5.进一步的,所述电动旋转组件包括底固定板、第一电机、第一传动轮、第二传动轮、传动带、第四轴承、第五轴承、固定架及第一外固定壳;所述第一电机固定在底固定板上,第一电机的第一电机输出轴穿过底固定板与第二传动轮相连,所述第一传动轮与第四轴承内环、第五轴承内环以及固定架的顶端固定连接,所述第一传动轮还通过第四轴承外环、第五轴承外环分别配合设置在底固定板及第一外固定壳上,且所述第一传动轮与第二传动轮之间通过传动带相连;所述固定架顶部配合固定设置在第一传动轮上,所述固定架底部通过固定设置的滑轨座与夹爪组件相连。进一步的,所述中空电动推拉组件包括第二电机、中空输出轴、转接座、推拉块、推拉杆及l型摆臂,所述转接座固定设置在底固定板上,所述推拉块仅可上下滑动配合设置在转接座内,所述第二电机固定设置在转接座上,且所述第二电机上穿设中空输出轴,中空输出轴一端与推拉块螺纹传动连接,所述推拉杆一端设置在推拉块内,并与第三轴承的内环固定连接,且所述推拉杆中间设有推拉杆第一通孔,所述推拉杆第一通孔与中空输出轴相通;所述推拉杆另一端与l型摆臂相连,并通过l型摆臂与夹爪组件相连。
6.进一步的,所述中空夹爪组件包括滑轨座及指型滑块,滑轨座中部设有滑轨座第一通孔,所述滑轨座第一通孔与推拉杆第一通孔相通;所述滑轨座内部设有滑轨座齿型槽,所述指型滑块包括指型滑块齿型凸起及指型滑块凸起,所述指型滑块齿型凸起与滑轨座齿型槽相配合,所述指型滑块顶面设有指型滑块沉头孔。
7.进一步的,所述控制组件包括第一电机控制器、总控器及第二电机控制器,所述第一电机控制器设置在第一电机顶部,所述总控器设置在第一电机控制器顶部,所述第二电机控制器设置在总控器顶部,所述第二电机控制器上的第一同步带轮与第二电机的中空输出轴另一端的第二同步带轮之间通过第一同步带相连。
8.进一步的,所述l型摆臂的一端设有l型摆臂球头,并通过l型摆臂球头穿过滑轨座与指型滑块上的指型滑块沉头孔活动连接;所述l型摆臂的中间折弯处设有第一固定轴,并通过第一固定轴活动连接在固定架的固定架第一通孔上;所述l型摆臂另一端设有l型摆臂u型通孔,并通过l型摆臂u型通孔与推拉杆一端活动连接。
9.进一步的,所述推拉杆一端通过第三轴承设置在推拉块的推拉块通孔u型槽内,所述推拉杆另一端对称设置推拉杆耳板,所述推拉杆耳板上设有推拉杆第二通孔,所述推拉杆第二通孔内设有第二固定轴,所述第二固定轴与l型摆臂u型通孔相配合。
10.中空型无限旋转电动夹爪,其特征在于,还包括壳体组件,所述壳体组件包括上固定板、上盖板及第二固定外壳,所述上固定板设置在第二电机顶部,所述上盖板设置在上固定板顶部,且上盖板上在与中空输出轴对应位置设有上盖板通孔;所述第一外固定壳、第二固定外壳分别设置在底固定板上。
11.本发明的有益效果是:1)通过设置的两个独立电机,分别实现对夹爪组件的旋转和抓夹动作,两个电机即可独立工作,亦可协同作业,机械运动互不干涉,提高了电动旋转夹爪的运行稳定性和可靠性。
12.2)通过设置的推拉块、轴承与推拉杆的传动配合,通过精巧的机械结构解决了传统电动夹爪无限旋转过程中需要依靠导电滑环解决绕线的问题,并在无导电滑环的前提下实现中空夹爪组件的无限旋转和抓夹的独立或协同运动。
13.3)中空推拉组件与中空夹爪之间相通,在整个电动夹爪纵向形成了一个通孔,能够实现该电动夹爪与灌装设备或其他需要中空结构作业装备的完美匹配,在灌装或相关作业完成后能够快速进行封盖或旋转、夹紧等动作,最大程度提高协作效率。
14.4)本发明整体结构设计紧凑、占用空间较小,且适用范围广,通用性好。
附图说明
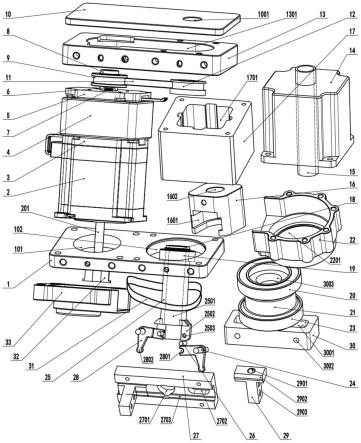
15.图1为本发明的整体结构爆炸图;图2为本发明的整体结构示意图;图中:1、底固定板;101、底固定板第一通孔;102、底固定板第二通孔;2、第一电机;201、第一电机输出轴;3、第一电机控制器;4、总控器;5、第二电机控制器;6、第一轴承;7、磁铁;8、第二轴承;9、第一同步带轮;10、上盖板;1001、上盖板通孔;11、第一同步带;12、第二同步带轮;13、上固定板;1301、上固定板通孔;14、第二电机;15、中空输出轴;16、推拉块;1601、推拉块通孔u型槽;1602、推拉块通孔;17、转接座;1701、转接座通孔;18、轴端固定圈;
19、第三轴承;20、第四轴承;21、第一传动轮;22、第一外固定壳;2201、第一外固定壳通孔;23、第五轴承;24、第一固定轴;25、推拉杆;2501、推拉杆第一通孔;2502、推拉杆耳板;2503、推拉杆第二通孔;26、第二固定轴;27、滑轨座;2701、滑轨座第一通孔;2702、滑轨座第二通孔;2703、滑轨座齿型槽;28、l型摆臂;2801、l型摆臂u型通孔;2802、l型摆臂球头;29、指型滑块;2901、指型滑块沉头孔;2902、指型滑块齿型凸起;2903、指型滑块凸起;30、固定架;3001、固定架第一腰型通孔;3002、固定架第一通孔;31、传动带;32、第二传动轮;33、第二固定外壳。
具体实施方式
16.以下结合说明书附图,对本发明作进一步描述。
17.如图1-2所示,中空型无限旋转电动夹爪,包括底固定板1、底固定板第一通孔101、底固定板第二通孔102、第一电机2、第一电机输出轴201、第一电机控制器3、总控器4、第二电机控制器5、第一轴承6、磁铁7、第二轴承8、第一同步带轮9、上盖板10、上盖板通孔1001、第一同步带11、第二同步带轮12、上固定板13、上固定板通孔1301、第二电机14、中空输出轴15、推拉块16、推拉块通孔u型槽1601、推拉块通孔1602、转接座17、转接座通孔1701、轴端固定圈18、第三轴承19、第四轴承20、第一传动轮21、第一外固定壳22、第一外固定壳通孔2201、第五轴承23、第一固定轴24、推拉杆25、推拉杆第一通孔2501、推拉杆耳板2502、推拉杆第二通孔2503、第二固定轴26、滑轨座27、滑轨座第一通孔2701、滑轨座第二通孔2702、滑轨座齿型槽2703、l型摆臂28、l型摆臂u型通孔2801、l型摆臂球头2802、指型滑块29、指型滑块沉头孔2901、指型滑块齿型凸起2902、指型滑块凸起2903、固定架30、固定架第一腰型通孔3001、固定架第一通孔3002、传动带31、第二传动轮32及第二固定外壳33。
18.实施例:推拉杆25的顶部与第三轴承19的内环通过轴端固定圈18固定连接,在推拉杆25下部外侧匹配设置有固定架30,推拉杆25外壁与固定架30的上部凸起(空心圆柱凸起)内壁不接触;在推拉杆25的底部开设有推拉杆耳板2502和推拉杆第二通孔2503,在推拉杆25的中间开设有推拉杆第一通孔2501,在推拉杆第二通孔2503上固定设有第二固定轴26,在第二固定轴26的上匹配设有l型摆臂28,通过l型摆臂u型通孔2801与第二固定轴26进行活动连接;在l型摆臂28上还开设有与第一固定轴24匹配的通孔,在l型摆臂28的底部设有l型摆臂球头2802,第一固定轴24设置在固定架30上的固定架第一通孔3002内,l型摆臂28可以绕第一固定轴24在固定架第一腰型通孔3001内转动。
19.固定架30的底部固定设有滑轨座27,在滑轨座27上设有滑轨座第一通孔2701;l型摆臂28的底部(l型摆臂球头2802)可以穿过滑轨座27上的滑轨座第二通孔2702与设置在指型滑块29上的指型滑块沉头孔2901活动连接,指型滑块29和滑轨座27通过分别设置的滑轨座齿型槽2703和指型滑块齿型凸起2902滑动连接。
20.第五轴承23的内环与固定架30的上部凸起固定连接,在第五轴承23的内环上部、固定架30上部凸起的外部固定设置有第一传动轮21,在第一传动轮21的外侧匹配设有传动带31,在第一传动轮21的顶部、固定架30的上部凸起的外部还固定设有第四轴承20的内环,第四轴承20的外环与底固定板1上的底固定板第二通孔102固定连接,第五轴承23的外环与第一外固定壳22上的第一外固定壳通孔2201固定连接,第一外固定壳22的上表面与底固定
板1的下表面固定连接。
21.第二电机14的内部设有中空的中空输出轴15,中空输出轴15的底部设置有与推拉块16上设置的推拉块通孔1602匹配的传动螺纹,在推拉块16的的底部设有推拉块通孔u型槽1601,通过设置在推拉块16上的推拉块通孔u型槽1601将第三轴承19的外环可拆卸卡接固定;在推拉块16的外部匹配设有转接座17,转接座17内部设有与推拉块16外形匹配的转接座通孔1701;在第二电机14的顶部固定设有上固定板13,在中空输出轴15的顶部固定设有第二同步带轮12,第二同步带轮12的外侧匹配设有第一同步带11,第一同步带11的另一端匹配设有第一同步带轮9,第一同步带轮9的上部设有第二轴承8,第一同步带轮9的下部设有第一轴承6,第一同步带轮9的底部设有磁铁7(磁铁镜像设置用于监测位置信号,实现电机的闭环控制),在磁铁7的下部还设有第二电机控制器5(编码器),第二电机控制器5固定设置在上固定板13的底部,在上固定板13的顶部固定设有上盖板10,上盖板10上开设有上盖板通孔1001,上固定板13上开设有上固定板通孔1301。
22.第二电机控制器5的底部固定设置总控器4,在总控器4底部固定设置第一电机控制器3(编码器),第一电机控制器3下方设置第一电机2,第一电机2固定在底固定板1上,第一电机2的第一电机输出轴201穿过底固定板1的底固定板第一通孔101,在其末端设置第二传动轮32,第二传动轮32与第一传动轮21通过传动带31相连;第二传动轮32下方设有第二固定外壳33,第二固定外壳33的上表面与底固定板1的下表面固定连接。
23.工作原理:该中空型无限旋转电动夹爪一般装配在需要将工件或灌装管等贯穿整个旋转夹爪手指内部的机器手上,机器手带动电动夹爪到达作业目标上方,通过将工件或灌装管等从上盖板通孔1001往下依次穿过第二同步带轮12、中空输出轴15、推拉块16、推拉杆25、滑轨座27后伸入作业目标设备内外,作业完成后,工件或灌装管等再退回到推拉杆25的推拉杆第一通孔2501内,机器手移动带动电动夹爪夹紧旋转工件或抓取上盖等,总控器4控制第二电机14转动,在中空输出轴15的转动下,带动推拉块16在转接座17内向上滑动,推拉块16带动与其相连的推拉杆25向上运动,同时推拉杆25底部的l型摆臂28绕第一固定轴转动,l型摆臂28的l型摆臂球头2802带动指型滑块29在滑轨座27内相对运动,夹紧工件或夹紧瓶盖;机器手移动带动中空电动夹爪到达作业对象或旋盖容器上方,总控器4控制第一电机2转动,通过第一传动轮32、传动带31带动第一传动轮21、固定座30转动,固定座30带动其下方的滑轨座27同步转动,即对夹紧的工件或瓶盖进行转动,实现夹紧和旋转协同动作。
24.上述实施例只是本发明的较佳实施例,并不是对本发明技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本发明专利的权利保护范围内。如中空推拉组件的上盖板、滑轨座上不设置通孔,中空输出轴、推拉杆不设置中空也应当在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1