具有同步运动结构的机械臂肘关节的制作方法
1.本实用新型涉及一种具有同步运动结构的机械臂肘关节。
背景技术:
2.肘关节是机械臂的重要组成部件之一,机械臂在拾取物件时,其肘关节需要承受物件以及机械臂本身带来的重力,因而对肘关节的稳定性和结构强度有较高的要求。
3.为了提高减少机械臂部件之间的干涉,机械臂的肘关节通常具有两个活动关节,机械臂在作业时要求两个活动关节能够同步运动,现有机械臂肘关节其两个活动关节之间的联动结构复杂,两个活动关节的同步性不强。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种具有同步运动结构的机械臂肘关节,结构简单,能够提高肘关节运动时的同步性和可靠性。
5.为实现上述目的,本实用新型提供了一种具有同步运动结构的机械臂肘关节,包括中间构件以及可转动设置在中间构件两端的活动构件,所述活动构件包括有与之同步转动的轴筒,所述轴筒与活动构件的转动轴心呈同轴设置,所述两个所述活动构件之间设置有牵引绳,该牵引绳呈s型绕设在所述两个活动构件的轴筒上,牵引绳的两端分别与所述两个活动构件固定配合。
6.本实用新型的有益效果是:通过牵引绳及轴筒的牵引配合,使得任意其中一个活动构件相对中间构件绕一方向转动时通过牵引绳的牵引能够驱动另一个活动构件相应的同步进行转动,通过结构简单的结构实现两个活动构件之间的联动,整体结构也更为紧凑,能够减少肘关节的重量。
7.进一步地,所述活动构件包括有两个所述的轴筒,所述两个活动构件的相对应的两个轴筒之间均呈s型绕设有所述的牵引绳,并且所述两个牵引绳的绕设方向互为相反设置。
8.进一步设置带来的优点是:采用两个采用相反绕设方向的牵引绳对活动构件和中间构件之间进行联动,使得任意其中一个活动构件相对中间构件绕两个方向转动时均能够牵引另一个活动构件相应的同步进行转动,提高两个活动构件的同步性,并且能够使受力更稳定。
9.进一步地,所述中间构件包括有分别设置在两个活动构件两侧的第一中间构件和第二中间构件,所述第一中间构件和第二中间构件的内侧具有相对设置的凸轴,所述活动构件的两个轴筒分别对应设置在其两侧位置,并且轴筒具有内孔,所述第一中间构件的凸轴和第二中间构件的凸轴转动插接于活动构件两侧的轴筒内孔中。
10.进一步设置带来的优点是:将凸轴转动插接于轴筒的内孔中,简化整体连接结构,使结构更紧凑。
11.进一步地,所述凸轴和轴筒之间为可拆卸连接。
12.进一步设置带来的优点是:方便肘关节的加工制造及装配。
13.进一步地,所述凸轴和轴筒之间设置有限位结构。
14.进一步设置带来的优点是:限位结构可防止凸轴和轴筒相脱离,提高工作时的可靠性。
15.进一步地,所述凸轴和轴筒之间设置有轴承。
16.进一步设置带来的优点是:轴承的设置可减少凸轴和轴筒之间的转动摩擦力,提高运行的可靠性。
附图说明
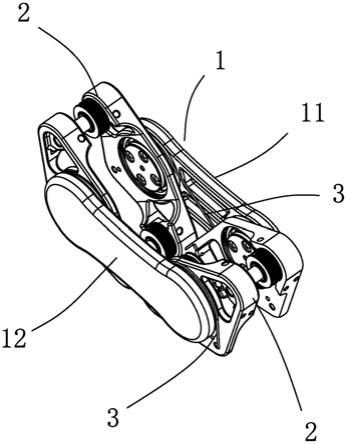
17.图1为本实用新型实施例的结构图;
18.图2为本实用新型实施例的两个活动构件的侧视图;
19.图3为本实用新型实施例的牵引绳绕设的示意图;
20.图4为本实用新型实施例的凸轴处的剖视图。
具体实施方式
21.本实用新型的具有同步运动结构的机械臂肘关节的实施例如图1
‑
4所示:包括中间构件1以及可转动设置在中间构件1两端的活动构件2,两个活动构件2分别用于与机械臂的前臂和后臂配合连接,所述活动构件2包括有与之同步转动的轴筒21,所述轴筒21与活动构件2的转动轴心呈同轴设置,所述两个所述活动构件2之间设置有牵引绳3,该牵引绳3呈s型绕设在所述两个活动构件2的轴筒21上,牵引绳3的两端分别与所述两个活动构件2固定配合,活动构件2上设置有定位孔20,牵引绳3的端部通过定位孔20进行固定,使得任意其中一个活动构件2相对中间构件1绕一方向转动时通过牵引绳3的牵引能够驱动另一个活动构件2相应的同步进行转动。
22.为了实现任意其中一个活动构件2在朝两个方向转动时均能够牵引另一个活动构件2相应的同步进行转动,如图3所示,所述活动构件2包括有两个所述的轴筒21,所述两个活动构件2的相对应的两个轴筒21之间均呈s型绕设有所述的牵引绳3,并且所述两个牵引绳3的绕设方向互为相反设置。
23.所述中间构件1包括有分别设置在两个活动构件2两侧的第一中间构件11和第二中间构件12,所述第一中间构件11和第二中间构件12的内侧具有相对设置的凸轴13,所述活动构件2的两个轴筒21分别对应设置在其两侧位置,并且轴筒21具有内孔211,所述第一中间构件11的凸轴13和第二中间构件12的凸轴13转动插接于活动构件2两侧的轴筒21内孔211中。
24.所述凸轴13和轴筒21之间为可拆卸连接,所述凸轴13和轴筒21之间设置有限位结构,可防止凸轴13从内孔211中脱出,所述凸轴13和轴筒21之间的连接处设置有轴承4,可降低转动的摩擦力。所述限位结构包括有挡板51、卡箍52,挡板51通过螺钉固定在凸轴13的端部,卡箍52卡接定位在轴筒21的内孔211处,挡板51和卡箍52分别与轴承4的内外圈配合限位,能够防止轴承4从凸轴13和轴筒21之间脱出,同时利用轴承4的内外圈之间的轴向限位,可防止凸轴13从内孔211中脱出(如图4所示)。安装时先将凸轴13和轴筒21进行套接,而后将轴承4装入两者之间,最后安装挡板51、卡箍52以形成限位。
25.以上实施例,只是本实用新型优选地具体实施例的一种,本领域技术人员在本实用新型技术方案范围内进行的通常变化和替换都包含在本实用新型的保护范围内。
技术特征:
1.一种具有同步运动结构的机械臂肘关节,包括中间构件以及可转动设置在中间构件两端的活动构件,其特征在于:所述活动构件包括有与之同步转动的轴筒,所述轴筒与活动构件的转动轴心呈同轴设置,所述两个活动构件之间设置有牵引绳,该牵引绳呈s型绕设在所述两个活动构件的轴筒上,牵引绳的两端分别与所述两个活动构件固定配合。2.根据权利要求1所述的具有同步运动结构的机械臂肘关节,其特征在于:所述活动构件包括有两个所述的轴筒,所述两个活动构件的相对应的两个轴筒之间均呈s型绕设有所述的牵引绳,并且所述两个牵引绳的绕设方向互为相反设置。3.根据权利要求2所述的具有同步运动结构的机械臂肘关节,其特征在于:所述中间构件包括有分别设置在两个活动构件两侧的第一中间构件和第二中间构件,所述第一中间构件和第二中间构件的内侧具有相对设置的凸轴,所述活动构件的两个轴筒分别对应设置在其两侧位置,并且轴筒具有内孔,所述第一中间构件的凸轴和第二中间构件的凸轴转动插接于活动构件两侧的轴筒内孔中。4.根据权利要求3所述的具有同步运动结构的机械臂肘关节,其特征在于:所述凸轴和轴筒之间为可拆卸连接。5.根据权利要求4所述的具有同步运动结构的机械臂肘关节,其特征在于:所述凸轴和轴筒之间设置有限位结构。6.根据权利要求3所述的具有同步运动结构的机械臂肘关节,其特征在于:所述凸轴和轴筒之间设置有轴承。
技术总结
本实用新型公开了一种具有同步运动结构的机械臂肘关节,包括中间构件以及可转动设置在中间构件两端的活动构件,所述活动构件包括有与之同步转动的轴筒,所述轴筒与活动构件的转动轴心呈同轴设置,所述两个所述活动构件之间设置有牵引绳,该牵引绳呈S型绕设在所述两个活动构件的轴筒上,牵引绳的两端分别与所述两个活动构件固定配合。本实用新型的具有同步运动结构的机械臂肘关节能够提高肘关节运动时的同步性和可靠性。时的同步性和可靠性。时的同步性和可靠性。
技术研发人员:叶华平 柯和继 池程鹏
受保护的技术使用者:海尚集团有限公司
技术研发日:2021.01.19
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1