钢丝网骨架复合管切割装置的制作方法
1.本实用新型涉及管材切割技术领域,尤其涉及一种钢丝网骨架复合管切割装置。
背景技术:
2.钢丝网骨架复合管是一种经过改良的新型钢骨架塑料复合管,又称srtp管,是用高强度过塑钢丝网骨架和热塑性塑料聚乙烯为原材料,具有更高的耐压性能,同时又具有优良的柔性,适用于长距离埋地用供水、输气管道系统。
3.目前钢丝网骨架复合管的生产是通过挤出机挤出芯管,钢丝缠绕在芯管表面上,然后再通过热熔胶复合在钢丝上,然后在外层再复合pe高分子材料。经过上述一系列复合成型后,就需要对满足长度要求的复合管进行切割。
技术实现要素:
4.有鉴于此,本实用新型提供一种钢丝网骨架复合管切割装置,主要目的是提高复合管端面切割的效率。
5.为达到上述目的,本实用新型主要提供如下技术方案:
6.本实用新型提供了一种钢丝网骨架复合管切割装置,该装置包括:机架、转动部和切割部;
7.所述转动部包括第一齿轮环、第二齿轮环、第一驱动齿轮和第二驱动齿轮,所述第一齿轮环和所述第二齿轮环通过多个连接杆相对固定设置,用于使复合管依次穿过所述第一齿轮环和所述第二齿轮环,所述第一齿轮环和所述第二齿轮环相互远离的侧面分别通过轴承安装于所述机架,所述第一驱动齿轮和所述第二驱动齿轮分别转动连接于所述机架,所述第一驱动齿轮啮合于所述第一齿轮环,所述第二驱动齿轮啮合于所述第二齿轮环;
8.所述切割部包括切割机构和进刀机构,所述切割机构包括转动板、切刀电机和切刀,所述转动板转动连接于其中一个所述连接杆,所述切刀电机固定安装于所述转动板,所述切刀电机的输出轴连接于所述切刀,用于驱动所述切刀转动,所述进刀机构包括进刀电机、圆盘和进刀杆,所述进刀电机固定安装于另一个所述连接杆,所述进刀电机的输出轴固定连接于所述圆盘,所述进刀杆的一端转动连接于所述圆盘的边缘,另一端转动连接于所述转动板的边缘,用于带动所述转动板转动。
9.本实用新型的目的及解决其技术问题还可采用以下技术措施进一步实现。
10.可选的,所述切刀的中心轴转动连接于所述转动板,所述切刀电机的输出轴通过三角带传动连接于所述切刀的中心轴。
11.可选的,多个所述连接杆包括第一连接杆、第二连接杆和第三连接杆,所述第一连接杆、所述第二连接杆和所述第三连接杆构成等边三角形,所述转动板转动连接于所述第一连接杆,所述进刀电机固定安装于所述第二连接杆,所述第三连接杆连接于配重块。
12.可选的,还包括双轴伸电机,所述双轴伸电机的输出轴分别固定连接于所述第一驱动齿轮和所述第二驱动齿轮。
13.可选的,所述进刀机构还包括位置感应器,所述位置感应器安装于进刀电机,所述圆盘的边缘相对设置有第一限位块和第二限位块,用于分别顶接所述位置感应器。
14.可选的,所述进刀电机为步进电机。
15.可选的,还包括罩体和集尘仓,所述罩体覆盖于所述第一齿轮环和所述第二齿轮环,所述集尘仓设置于所述罩体的下部,用于收集脱落的复合管碎屑。
16.借由上述技术方案,本实用新型至少具有下列优点:
17.第一齿轮环和第二齿轮环通过轴承安装于机架,第一齿轮环和第二齿轮环相对于机架的位置不会改变,当托架上的复合管依次穿过第一齿轮环和第二齿轮环后,以使第一齿轮环和第二齿轮环与复合管保持稳定的间隙。
18.在上述结构特征的基础上,第一驱动齿轮带动第一齿轮环转动,同时,第二驱动齿轮带动第二齿轮环转动,第一齿轮环和第二齿轮环就不会摩擦至复合管的管壁。
19.同时,第一齿轮环和第二齿轮环带动切割机构和进刀机构同步转动,从而带动切刀绕复合管的径向圆周转动。
20.进刀电机带动圆盘转动,圆盘带动进刀杆往复运动,从而带动转动板以其中一个连接杆为中心转动,从而带动切刀靠近或者远离复合管,从而达到切割复合管或停止切割复合管的目的。
附图说明
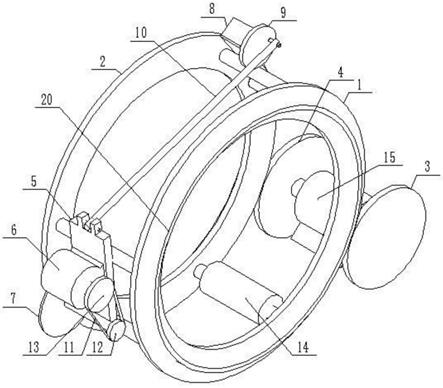
21.图1为本实用新型实施例提供的一种钢丝网骨架复合管切割装置的立体图;
22.图2为本实用新型实施例提供的一种钢丝网骨架复合管切割装置侧视图;
23.图3为本实用新型实施例提供的圆盘的结构示意图。
24.说明书附图中的附图标记包括:第一齿轮环1、第二齿轮环2、第一驱动齿轮3、第二驱动齿轮4、转动板5、切刀电机6、切刀7、进刀电机8、圆盘9、进刀杆10、三角带11、第一皮带轮12、第二皮带轮13、配重块14、双轴伸电机15、位置感应器16、第一限位块17、第二限位块18、滚轮19、套筒20。
具体实施方式
25.为更进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型申请的具体实施方式、结构、特征及其功效,详细说明如后。在下述说明中,不同的“一实施例”或“实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构、或特点可由任何合适形式组合。
26.下面结合附图和实施例对本实用新型作进一步的详细说明。
27.如图1和图2所示,本实用新型的一个实施例提供的一种钢丝网骨架复合管切割装置,其包括:机架、转动部和切割部;
28.所述转动部包括第一齿轮环1、第二齿轮环2、第一驱动齿轮3和第二驱动齿轮4,所述第一齿轮环1和所述第二齿轮环2通过多个连接杆相对固定设置,用于使复合管依次穿过所述第一齿轮环1和所述第二齿轮环2,所述第一齿轮环1和所述第二齿轮环2相互远离的侧面分别通过轴承安装于所述机架,所述第一驱动齿轮3和所述第二驱动齿轮4分别转动连接于所述机架,所述第一驱动齿轮3啮合于所述第一齿轮环1,所述第二驱动齿轮4啮合于所述
第二齿轮环2;
29.所述切割部包括切割机构和进刀机构,所述切割机构包括转动板5、切刀电机6和切刀7,所述转动板5转动连接于其中一个所述连接杆,所述切刀电机6固定安装于所述转动板5,所述切刀电机6的输出轴连接于所述切刀7,用于驱动所述切刀7转动,所述进刀机构包括进刀电机8、圆盘9和进刀杆10,所述进刀电机8固定安装于另一个所述连接杆,所述进刀电机8的输出轴固定连接于所述圆盘9,所述进刀杆10的一端转动连接于所述圆盘9的边缘,另一端转动连接于所述转动板5的边缘,用于带动所述转动板5转动。
30.钢丝网骨架复合管切割装置工作过程如下:
31.第一齿轮环1和第二齿轮环2通过轴承安装于机架,第一齿轮环1和第二齿轮环2相对于机架的位置不会改变,当托架上的复合管依次穿过第一齿轮环1和第二齿轮环2后,以使第一齿轮环1和第二齿轮环2与复合管保持稳定的间隙。
32.在上述结构特征的基础上,第一驱动齿轮3带动第一齿轮环1转动,同时,第二驱动齿轮4带动第二齿轮环2转动,第一齿轮环1和第二齿轮环2就不会摩擦至复合管的管壁。
33.同时,第一齿轮环1和第二齿轮环2带动切割机构和进刀机构同步转动,从而带动切刀7绕复合管的径向圆周转动。
34.进刀电机8带动圆盘9转动,圆盘9带动进刀杆10往复运动,从而带动转动板5以其中一个连接杆为中心转动,从而带动切刀7靠近或者远离复合管,从而达到切割复合管或停止切割复合管的目的。
35.在本实用新型的技术方案中,通过齿轮环的自转,以使切刀7绕复合管的中轴线公转,转动的圆盘9带动进刀杆10往复运动,带动切刀7执行切割复合管的动作。
36.具体的,第一齿轮环1和第二齿轮环2相互远离的侧面分别固定焊接于套筒20,所述套筒20内缘套接于轴承的外圈,轴承的内圈套接于机架,以使第一齿轮环1和第二齿轮环2相对于机架稳定转动。
37.如图1和图2所示,在具体实施方式中,所述切刀7的中心轴转动连接于所述转动板5,所述切刀电机6的输出轴通过三角带11传动连接于所述切刀7的中心轴。
38.在本实施方式中,具体的,所述切刀7的中心轴平键连接于第一皮带轮12,所述切刀电机6的输出轴平键连接于第二皮带轮13,所述第一皮带轮12和所述第二皮带轮13通过三角带11传动连接,以避免切刀电机6过载。
39.如图1和图2所示,在具体实施方式中,多个所述连接杆包括第一连接杆、第二连接杆和第三连接杆,所述第一连接杆、所述第二连接杆和所述第三连接杆构成等边三角形,所述转动板5转动连接于所述第一连接杆,所述进刀电机8固定安装于所述第二连接杆,所述第三连接杆连接于配重块14。
40.在本实施方式中,具体的,所述切割机构的重量集中于第一连接杆,所述进刀机构的重量集中于第二连接杆,配重块14的重量集中于第三连接杆,即等边三角形的三个顶点均有重量载荷。当第一齿轮环1和第二齿轮环2自转时,三个重量载荷所产生的离心力相互平衡,避免第一齿轮环1和第二齿轮环2压坏轴承而偏心转动。
41.如图1所示,在具体实施方式中,还包括双轴伸电机15,所述双轴伸电机15的输出轴分别固定连接于所述第一驱动齿轮3和所述第二驱动齿轮4。
42.在本实施方式中,具体的,双轴伸电机15的输出轴包括第一输出轴和第二输出轴,
第一输出轴平键连接于第一驱动齿轮3,第二输出轴平键连接于第二驱动齿轮4,第一输出轴和第二输出轴的转速相同,进一步保证第一驱动齿轮3和第二驱动齿轮4同步转动,从而进一步保证第一齿轮环1和第二齿轮环2同步转动。
43.具体的,双轴伸电机15电连接于换向控制器。当切刀7对复合管完成径向圆周切割后,换向控制器控制双轴伸电机15变换转动方向,以使切刀7回到起始位置。
44.如图3所示,在具体实施方式中,所述进刀机构还包括位置感应器16,所述位置感应器16安装于进刀电机8,所述圆盘9的边缘相对设置有第一限位块17和第二限位块18,用于分别顶接所述位置感应器16。
45.具体的,位置感应器16安装有滚轮19,滚轮19顶接于第一限位块17或第二限位块18,以减缓位置感应器16所受到的冲击力。
46.在本实施方式中,具体的,还包括控制器,所述位置感应器16的输出端电连接于控制器的输入端,所述控制器的输出端电连接于进刀电机8。
47.当第一限位块17顶接于位置感应器16时,控制器向进刀电机8发出第一指令,转动的圆盘9通过进刀杆10带动切刀7抵近复合管;当切刀7绕复合管转动一周,并切割完毕复合管端面后,控制器向进刀电机8发出第二指令,圆盘9反向转动;当第二限位块18顶接于位置感应器16时,控制器向进刀电机8发出第三指令,圆盘9停止转动,切刀7稳定于距离复合管管壁的最远端。
48.在具体实施方式中,所述进刀电机8为步进电机。
49.在本实施方式中,具体的,控制器通过控制步进电机的步进角度和转动方向,避免圆盘9因惯性而过度转动,以精准控制切刀7和复合管之间的位置关系。
50.在具体实施方式中,还包括罩体和集尘仓,所述罩体覆盖于所述第一齿轮环1和所述第二齿轮环2,所述集尘仓设置于所述罩体的下部,用于收集脱落的复合管碎屑。
51.在本实施方式中,具体的,所述罩体覆盖第一齿轮环1和第二齿轮环2之间的空间,避免因切割复合管而产生的碎屑四处飞溅,进而使碎屑沉积于集尘仓中。
52.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1