一种RV减速器代替齿轮三轴联动机构的制作方法
一种rv减速器代替齿轮三轴联动机构
技术领域
1.本实用新型涉及一种工业机器人,尤其涉及一种rv减速器代替齿轮三轴联动机构。
背景技术:
2.传统的在轴承套圈的锻造线上,普遍采用人工操作方式将锻造线上的高温轴承套圈从一个工位抓取摆放到另一个工位,但由于车间工作环境温度很高,尤其是夏季更是热,工人只得赤膊干活散热,直接带来安全隐患,且一般每干2个小时就要离开岗位休息半个小时喝水休息散热。当市场出现国产机器人不久,人们就曾提出希望采用机器人来代替人工对锻造线上的高温轴承套圈进行转移作业。
3.目前,经过近几年工业机器人技术的不断研究发展,对于100吨、160吨及160吨以上的锻压生产线,已经开发出了多款可用于对不同级别锻压生产线进行自动化改造应用的6轴50公斤、6轴150公斤等不同级别的锻压工业机器人。
4.但现有6轴锻压工业机器人的3轴或4轴旋转轴一般采用齿轮传动方式,而齿轮传动普遍存在效率低、扭矩小、声音大及精度差等缺陷。因此,有必要对现有6轴锻压工业机器人中3轴或4轴旋转轴的传动方式进行改进。
技术实现要素:
5.本实用新型所要解决的技术问题是:针对现有技术的缺陷,提供一种rv减速器代替齿轮三轴联动机构。
6.本实用新型为解决上述技术问题采用以下技术方案:
7.本实用新型提供一种rv减速器代替齿轮三轴联动机构,包括基座和自下而上依次设置于所述基座上的升降运动轴、旋转运动轴和平移运动轴,其中:所述旋转运动轴设置于所述升降运动轴的升降工作台上,且其输出轴与其顶部布置的rv减速器传动连接;以及所述rv减速器的输出端竖直朝上布置并连接旋转工作台,所述旋转工作台通过若干第一螺栓连接所述平移运动轴。
8.进一步地,在所述的rv减速器代替齿轮三轴联动机构上,所述升降运动轴包括立板、导轨、升降电机、丝杆、滑台、滑块、连接板和升降工作台,其中:
9.所述立板为两个,呈垂直且间隔设置于所述基座上,所述立板内侧的左右端分别竖向设置有所述导轨;
10.所述升降电机的输出轴连接所述丝杆,所述滑台活动设置于所述丝杆上并通过滑块滑动连接所述导轨;以及
11.所述滑台的两侧设置通过连接板与其顶部设置的所述升降工作台连接,且所述升降工作台上装设有所述旋转运动轴。
12.进一步优选地,在所述的rv减速器代替齿轮三轴联动机构上,所述升降电机竖向朝上设置于所述基座上,或竖向朝下设置于所述立板顶端。
13.进一步优选地,在所述的rv减速器代替齿轮三轴联动机构上,所述滑台通过l型过渡板和所述滑块与另一侧的两所述导轨滑动连接。
14.进一步优选地,在所述的rv减速器代替齿轮三轴联动机构上,所述旋转运动轴采用垂直布置的伺服电机,所述伺服电机的输出轴连接所述rv减速器。
15.进一步地,在所述的rv减速器代替齿轮三轴联动机构上,所述平移运动轴采用丝杆滑动平台。
16.进一步地,在所述的rv减速器代替齿轮三轴联动机构上,所述旋转运动轴的下端通过若干第二螺栓与所述升降运动轴上的升降工作台可拆卸连接。
17.进一步地,在所述的rv减速器代替齿轮三轴联动机构上,还包括:
18.plc控制柜,所述plc控制柜设置于所述基座上且位于所述升降运动轴的一侧位置,其分别电连接所述升降运动轴、旋转运动轴和平移运动轴。
19.进一步优选地,在所述的rv减速器代替齿轮三轴联动机构上,所述plc控制柜的侧壁设置有显示屏、控制按钮,顶部设置有警示灯。
20.进一步地,在所述的rv减速器代替齿轮三轴联动机构上,所述基座的四角位置分别设有耳板,所述耳板上开设有安装孔。
21.本实用新型采用以上技术方案,与现有技术相比,具有如下技术效果:
22.本实用新型提供的rv减速器代替齿轮三轴联动机构,通过改变传统的齿轮旋转角度的模式,采用rv减速器代替齿轮组旋转,由旋转运动轴的伺服电机提供动力给rv减速器,并通过rv减速器带动旋转工作台,大大提高了旋转工作台的角度转动精度;且该rv减速器代替齿轮三轴联动机构具有结构简单,使用和安装方便,精度较高,传递扭矩大以及运行噪音小等优点。
附图说明
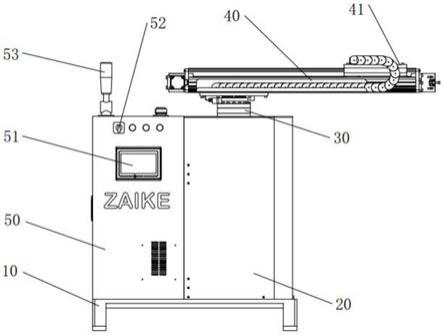
23.图1为本实用新型一种rv减速器代替齿轮三轴联动机构的主视结构示意图;
24.图2为本实用新型一种rv减速器代替齿轮三轴联动机构中旋转运动轴和rv减速器的装配结构示意图;
25.图3为本实用新型一种rv减速器代替齿轮三轴联动机构中升降运动轴和plc控制柜的结构示意图;
26.图4为本实用新型一种rv减速器代替齿轮三轴联动机构中升降运动轴的结构示意图;
27.图5为本实用新型一种rv减速器代替齿轮三轴联动机构中旋转工作台的俯视结构示意图;
28.图6为本实用新型一种rv减速器代替齿轮三轴联动机构中基座的俯视结构示意图;
29.其中,各附图标记为:
30.10
‑
基座,11
‑
耳板;20
‑
升降运动轴,21
‑
立板,22
‑
导轨,23
‑
升降电机,24
‑
丝杆,25
‑
滑台,26
‑
滑块,27
‑
连接板,28
‑
升降工作台,29
‑
l型过渡板;30
‑
旋转运动轴,31
‑
减速机,32
‑
旋转工作台,33
‑
第一螺栓,34
‑
第二螺栓;40
‑
平移运动轴,41
‑
平移工作台,50
‑
plc控制柜,51
‑
工控显示屏,52
‑
控制按钮,53
‑
警示灯。
具体实施方式
31.下面结合附图对本实用新型的技术方案做进一步的详细说明。
32.在一些实施例中,如图1和图2所示,提供一种rv减速器代替齿轮三轴联动机构,包括基座10和自下而上依次设置于基座10上的升降运动轴20、旋转运动轴30和平移运动轴40,其中:旋转运动轴30设置于升降运动轴20的升降工作台28上,且其输出轴与其顶部布置的rv减速器31传动连接;以及rv减速器31的输出端竖直朝上布置并连接旋转工作台32,旋转工作台32通过若干第一螺栓33连接平移运动轴40。通过改变传统的齿轮旋转角度的模式,采用rv减速器31代替传统的齿轮组旋转,由旋转运动轴30的伺服电机提供动力给rv减速器31,并通过rv减速器31带动旋转工作台32,大大提高了旋转工作台的角度转动精度,其转动精度可到0.1弧分。
33.在其中的一个实施例中,如图3和图4所示,升降运动轴20包括立板21、导轨22、升降电机23、丝杆24、滑台25、滑块26、连接板27和升降工作台28,其中:立板21为两个,呈垂直且间隔设置于基座10上,立板21内侧的左右端分别竖向设置有导轨22;升降电机23的输出轴连接丝杆24,滑台25活动设置于丝杆24上并通过滑块26滑动连接导轨22;以及滑台25的两侧设置通过连接板27与其顶部设置的升降工作台28连接,且升降工作台28上装设有旋转运动轴30。
34.在其中的一个实施例中,如图3和图4所示,升降电机23竖向朝上设置于基座10上,其顶端的输出轴与丝杆24的下端通过联轴器连接;或升降电机23竖向朝下设置于立板21顶端,其下端的输出轴与丝杆24的顶端通过联轴器连接,从而通过升降电机23的转动带动丝杆24的转动,继而通过滑块26将升降电机23的扭力转化为带动升降工作台28上下移动的提升力。
35.在其中的一个实施例中,如图3和图4所示,滑台25通过l型过渡板29和滑块26与另一侧的两导轨22滑动连接,导轨22为四根,呈四角竖直布置在基座10上,通过四根导轨22保证了滑块26及其上升降工作台28在上下升降过程中的稳定性和精准性。
36.在其中的一个实施例中,如图1、图2和图4所示,旋转运动轴30采用垂直布置的伺服电机,伺服电机的输出轴连接rv减速器31;平移运动轴40采用丝杆滑动平台。
37.在其中的一个实施例中,如图1、图2、图4和图5所示,在旋转工作台32上均布有若干螺纹孔,通过对应的若干第一螺栓33将平移运动轴40固定安装在该旋转工作台32,从而由旋转运动轴30的伺服电机提供动力给rv减速器31,并通过rv减速器31带动旋转工作台32,以提高旋转工作台32的运行稳定性和角度转动的精度。此外,旋转运动轴30的下端通过若干第二螺栓34与升降运动轴20上的升降工作台28可拆卸连接,同样,在升降工作台28上也开设有若干均布的螺纹孔,并采用若干第二螺栓34将旋转运动轴30固定安装在升降工作台28上,以保证旋转运动轴30运行的稳定性和升降的精准度。
38.在其中的一个实施例中,如图1、图3和图4所示,该rv减速器代替齿轮三轴联动机构还包括:设置于基座10上的plc控制柜50,且plc控制柜50设置于升降运动轴20的一侧,机器人本体、plc控制柜50及工控显示屏51相当于示教器三位一体化的设计,不但节省成本,而且占地少、现场安装搬运方便。且plc控制柜50分别电连接升降运动轴20、旋转运动轴30和平移运动轴40,通过plc控制柜50控制升降运动轴20、旋转运动轴30和平移运动轴40运动。
39.在其中的一个实施例中,如图1、图3和图4所示,plc控制柜50的侧壁设置有工控显示屏51、控制按钮52,顶部设置有警示灯53;工控显示屏51采用触摸屏,用于实时显示该工业机器人的工作状态和选择工作模式;控制按钮52用于控制该工业机器人的启停;警示灯53用于该工业机器人发生故障时发出报警,提醒工作人员及时处理,警示灯53采用声光警报器。且在plc控制柜50的前侧壁还均布有若干散热孔。
40.在其中的一个实施例中,如图1、图3、图4和图6所示,在基座10的四角位置分别设有耳板11,并在耳板11上开设有安装孔。耳板11与基座10一体成型,或采用焊接方式焊接于基座10上,通过穿过耳板11的螺栓可该基座10固定安装在相应的工作平台上,保证了该rv减速器代替齿轮三轴联动机构运行的稳定性。
41.以上对本实用新型的具体实施例进行了详细描述,但其只作为范例,本实用新型并不限制于以上描述的具体实施例。对于本领域技术人员而言,任何对该实用进行的等同修改和替代也都在本实用新型的范畴之中。因此,在不脱离本实用新型的精神和范围下所作的均等变换和修改,都应涵盖在本实用新型的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1