一种防撞机械臂
1.本实用新型涉及机器人防撞技术领域,尤其涉及一种防撞机械臂。
背景技术:
2.机械臂又称协作机器人,在机械化或无人操作流程大量生产应用中,用于车间协助生产。人机协作是工业机器人发展的主要方向,无论工业生产还是日常生活,机器人与人的交互越来越密切。机器人的安全性受到更多关注,碰撞检测技术是一个主要的研究方向。
3.目前碰撞检测研究大多数是通过设计新型机械机构、集成力矩传感器、覆盖新材料皮肤等方法减小碰撞冲力,但对于现有工业机器人上实现碰撞检测需要对机械结构做较大的改动、增加额外的传感器也意味着较高的成本。
4.目前的机械臂防撞有两种:一种是采用弹簧缓冲安装在机械臂工作部位,抵消机械臂撞击时的冲击力,另一种采用视频监控成像反馈。但是,第一种方法不可抵消高速运动状态,机器人撞击带来的冲击力,使机械臂磨损严重,造成一定的经济损失;第二种视频监控成像防撞,设备生产成本高。
5.由于生产环境通常较为复杂,机械臂可能会与其他设备发生碰撞,特别是快速运行、惯性或驱动力较大的情况下,碰撞对机械臂内部结构造成的损坏较大。
6.中国专利文献cn201610479398.0披露了一种带有自我保护功能的防撞机械臂,包括:底座、轴关节、位置监控装置、保护壳和控制装置。障碍物进入机械臂的非安全区域,将会通过报警装置进行报警。但是,不但其监控装置存在监控死角,例如底座侧面或其他位置,而且机械臂工作过程中存在盲点,例如低于底座高度的工作位置,机械臂无法进行正常工作;且设备成本高。
7.综上所述,目前对于移动形机器人手臂防撞保护相关设计存在设备成本高、防撞效果不灵活、安全性低的特点。在发生撞击事件时,对上下游设备及机器人手臂本体都造成了一定的破坏造成经济损失。并且,带来一定安全问题的同时,后续的维修工作影响了生产的效率,降低了设备的使用寿命,扩大经济损失。
技术实现要素:
8.本实用新型的目的在于提出一种成本低、安全性高、防撞效果灵活的防撞机械臂,以便在机械臂工作或移动过程中能够灵活的防撞,以避免机械臂损坏带来的经济损失严重及安全方面的问题。
9.为此,本实用新型采用了以下技术方案:
10.一种防撞机械臂,包括底座和机械臂,其特征在于,所述机械臂包括第一机械臂、第二机械臂、以及第三机械臂,其中,所述第一机械臂与第二机械臂通过铰接旋转连接,所述第二机械臂与第三机械臂能够伸缩地连接,所述第三机械臂的末端伸缩设置有机械爪,所述防撞机械臂还包括在所述底座外侧面间隔设置的防撞缓冲组件,所述防撞缓冲组件包括第一橡胶板、短杆、固定座、连接板、碰撞报警装置、以及第二缓冲弹簧,其中,所述第一橡
胶板侧面间隔固定设置短杆,所述固定座一端对应位置带有通孔,另一端固定设置在底座外侧侧壁上,所述短杆通过所述通孔,活动设置在固定座的一侧,所述短杆自由端设置联接板,所述联接板对应位置设有第二缓冲弹簧及第一碰撞报警装置,还包括在所述底座顶部靠边间隔设置的红外测距仪,用于检测障碍物与底座安全距离。
11.进一步地,上述底座顶部中间设置竖直轴向转动的转动轴,所述转动轴顶部与所述机械臂一端水平方向上铰接。
12.进一步地,上述第三机械臂尾端与所述机械爪之间设置有第一缓冲弹簧;所述第三机械臂尾端与所述机械爪通过连接杆伸缩连接;所述第一缓冲弹簧套设于连接杆第一端外围;所述连接杆第二端设置第二碰撞报警装置;所述第三机械臂内部固定设置第三缓冲弹簧;所述第三缓冲弹簧自由端固定设置压块。
13.进一步地,上述红外/激光测距仪设置在所述底座顶部靠边位置,数量为三个。
14.进一步地,上述底座防撞缓冲组件为三个,包覆设置于所述底座侧面。
15.进一步地,上述底座外侧防撞缓冲组件内部第二缓冲弹簧至少为三个且第一碰撞报警装置为一个,所述防撞缓冲组件上第二缓冲弹簧设置在第一碰撞报警装置四周。
16.进一步地,上述底座之下设置底轮,所述底座内部设置用于所述底轮及所述机械臂工作的驱动装置。
17.本实用新型的防撞机械臂具有以下有益效果:
18.(1)防撞缓冲组件间隔设置于底座外侧面,安装拆卸方便,可以防止不同方向的撞击;红外测距仪靠边间隔设置顶部,同一方位的两个红外测距仪可以相互配合,360
°
监控,减少监控死角。
19.(2)两个机械部位同时采用防撞措施:机械臂设置弹簧缓冲、底座外部设置防撞缓冲组件,改善了实际操作中单一底座或单一机械臂的防撞效果较差的问题,减小机械臂撞击的损失。机械臂活动范围增大,防撞效果好。
20.(3)使用红外激光测距传感器模块,能够感应距离机体前进方向30cm
‑
500cm的障碍物的距离,感应灵敏,制造成本低。根据测距反馈数据,使行进的机械臂减速停止,红外线监测相对于视频监测准确且制造成本低。
21.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
22.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
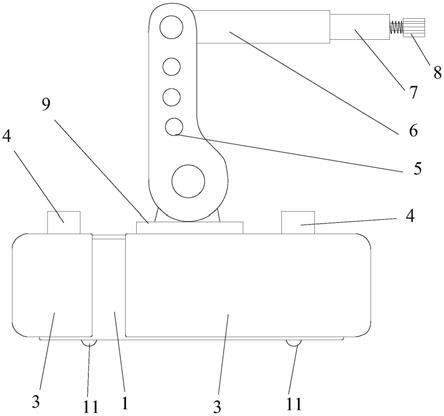
23.图1为本实用新型一种防撞机械臂结构示意图;
24.图2为本实用新型一种防撞机械臂俯视图;
25.图3为本实用新型底座防撞结构实施例一结构示意图;
26.图4为本实用新型一种防撞机械臂机械爪防撞结构实施例一剖面结构示意图。
27.附图标记说明:
28.1、底座;2、机械臂;3、防撞缓冲组件;31、第一橡胶板;32、短杆;33、固定座;34、连
接板;35、第一碰撞报警装置;36、第二缓冲弹簧;4、红外测距仪;5、第一机械臂;6、第二机械臂;7、第三机械臂;8、机械爪;9、转动轴;10、连接杆;101、第一缓冲弹簧;102、连接杆第一端;103、连接杆第二端;104、第二碰撞报警装置;105、第三缓冲弹簧;106、压块;11、底轮。
具体实施方式
29.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
30.在一实施例中,本防撞机械臂包括底座1和机械臂2。所述底座1外侧面间隔设置防撞缓冲组件3,所述底座1顶部靠边间隔设置红外测距仪4。
31.所述机械臂2包括第一机械臂5、第二机械臂6、第三机械臂7;所述第一机械臂5与第二机械臂6通过铰接旋转连接;所述第二机械臂6与第三机械臂7伸缩连接;所述第三机械臂7尾端伸缩设置机械爪8。
32.所述防撞缓冲组件3包括:第一橡胶板31、短杆32、固定座33、连接板、碰撞报警装置、第二缓冲弹簧36;所述第一橡胶板31侧面间隔固定设置短杆32;所述固定座33一端对应位置带有通孔,另一端固定设置在底座1外侧侧壁上;所述短杆32通过所述通孔,活动设置在固定座33的一侧;所述短杆32自由端设置联接板34;所述联接板34对应位置设有第二缓冲弹簧36及第一碰撞报警装置35。
33.优选地,所述底座1顶部中间设置竖直轴向转动的转动轴9,所述转动轴9顶部与所述机械臂2一端水平方向上铰接。
34.优选地,所述第三机械臂7尾端与所述机械爪8之间设置有第一缓冲弹簧101;所述第三机械臂7尾端与所述机械爪8通过连接杆10伸缩连接;所述第一缓冲弹簧101套设于连接杆第一端102外围;所述连接杆第二端103设置第二碰撞报警装置104;所述第三机械臂7内部固定设置第三缓冲弹簧105;所述第三缓冲弹簧105自由端固定设置压块106。
35.在一实施例中,所述红外测距仪4设置在所述底座1顶部靠边位置,数量为三个。
36.在一实施例中,所述底座1防撞缓冲组件3为三个,包覆设置于所述底座1侧面。
37.优选地,所述底座1外侧防撞缓冲组件3内部第二缓冲弹簧36至少为三个且第一碰撞报警装置35为一个,所述防撞缓冲组件3上第二缓冲弹簧36设置在第一碰撞报警装置35四周。
38.优选地,所述底座1之下设置底轮11,所述底座1内部设置用于所述底轮11及所述机械臂2工作的驱动装置。
39.在本实用新型中,防撞缓冲组件3间隔设置于底座1外侧面,安装拆卸方便,可以防止不同方向的撞击;红外测距仪4靠边间隔设置顶部,同一方位的两个红外测距仪4可以相互配合,全方向360
°
监控,减少监控死角。
40.在本实用新型中,两个机械部位同时采用防撞措施:机械臂2设置弹簧缓冲、底座1外部设置防撞缓冲组件3,克服实际操作中单一底座1或单一机械臂2的防撞效果较差的问题,减小机械臂2撞击的损失。机械臂2活动范围增大,防撞效果好。
41.在本实用新型中,使用红外激光测距传感器模块,能够感应距离机体前进方向30cm
‑
500cm的障碍物的距离,感应灵敏,制造成本低。根据测距反馈数据,使行进的机械臂2减速停止,红外线监测相对于视频监测准确且制造成本低。
42.红外线作为一种特殊的光波,具有光波的基本物理传输特性—反射、折射、散射等,且由于其技术难度相对不太大,构成的测距系统成本低廉,性能优良,便于民用推广。
43.本防撞机械臂采用红外激光测距感应灵敏,制造成本低;底座防撞缓冲组件与机械臂防撞缓冲弹簧能够提供一个较好的缓冲作用,安全性高;多个红外激光测距与防撞缓冲配合,在工作或移动过程中能够灵活的防撞。
44.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1